自从1929年汉斯·伯格发明EEG之后,人们就开始思索能否通过这个神奇的发明让大脑不借助任何其他媒介(包括神经和肌肉)来直接进行沟通交互和设备控制。到了20世纪70年代,有一些科学家已经开发出一种利用由头部的电活动记录控制的简单交互系统。而美国国防部高级研究计划局(Advanced Research Project Agency,ARPA)在大力开发国际互联网的同时,也对这项能为人和计算机提供更“亲密接触”机会的技术产生了浓厚的兴趣。其中值得一提的是,为了提高那些在军队中因从事高风险工作的人的表现,乔治·劳伦斯(George Lawrence)教授提出并负责一项开发生物反馈技术的研究。这项研究并没有在他预期的方向上取得多少进展,却在生物反馈本身有了意外的突破。一个新的方向,被称为生物控制论的学科产生了,并在接下来的几年中成为仿生学研究的重点。
而在生物控制论中很重要的方向,就是评估将生物信号利用计算机实时转换成电信号,进而帮助控制如汽车、武器和其他系统的可能性。当时在这方面最有成就的要数由加利福尼亚大学洛杉矶分校的杰奎尔·维达(Jacques Vidal)教授负责的BCI实验室,他的团队通过计算机发出的可视化刺激和精密的信号过程的实现,证实了在单个(并非每个)试验中,可视诱发电位(Visual Evoked Potentials,VEP)能够为人们提供交互平台来控制在计算机屏幕上二维迷宫的移动光标。
这些BCI技术的先行者们,在自己的早期工作中就发现了区别使用肌电图(Electromyo-graphic,EMG)和EEG进行系统控制的重要性。坦率地说,在同一位置上使用EMG和EEG时,EMG的表现更加出色,信号更强,更有利于设备控制。甚至有时候EMG可以伪装成EEG,与后者没什么明显区别。但是正是这种错觉,阻碍了后者的发展,也会将BCI技术发展引入歧途,因为以EEG为基础的控制系统是不依靠肌肉控制的,而这恰恰是EMG的致命弱点,它根本就不能做到真正的人脑和计算机的通信。
基于EEG的BCI系统是目前脑机接口技术研究的主流技术。BCI技术发展的首要目的就是为那些有严重行动障碍和小儿麻痹患者,提供一种全新的交互方式,因为其他传统的交互方式都要借助各种形式的肌肉控制,而这些传统的交互方式对那些有严重行动障碍的患者是可望而不可及的。
与其他的交互控制系统相似,一个BCI系统由输入、输出以及将输入信号转换成输出信号的脑电信号处理算法来实现。目前,BCI输入信号的方法分为非嵌入头皮层和嵌入头皮层方法。非嵌入式使用头顶记录EEG或诱发电位,而嵌入式使用皮层内记录神经单位活动或EEG硬脑膜记录。
不同的BCI系统使用不同的脑电信号处理算法,这些算法可能包括线性的和非线性的、有关神经网络的或其他的方法,并且将重要的参数混合来理解输入信息。输出信息包括光标移动、字符选择、图形选择和一些其他的设备控制,还包括将信息反馈给患病者,使其能与外界达到最完美的交互效果。除以上主要部分外,还可能配有开/关、反应时间显示、速度、精度,以及由它们共同影响的脑电信号处理率这些参数等。
1.不同BCI系统的性能比较
不同的BCI系统在其输入、输出和脑电信号处理算法上都存在很大的差异,通常比较两个不同的BCI系统是非常困难的。因为似乎在不同的应用上,不同的BCI系统都有自己的优势,但必须注意到,没有统一的标准来衡量是不利于BCI技术发展的。在2000年第一次召开的BCI技术国际会议上提出了一个标准尺度:比特率,即每个单位时间内信息成功传送的数量。比特率依靠的是传送信息的速度和准确率。结合目前比较先进的BCI设备的现状,绘制出图2-13所示的信息传递的准确率和速度之间的关系,此图论证了在不同的可能选择个数(包括2、4、8、16、32个)范围内信息传递的准确率和速度之间的关系。信息传送速度用单位次数选择(单位实验)传递的比特数(bit/次)和每分钟传递的比特数(bit/min)分别表示。从图中不难发现,传输速度越快,传输准确率也相应越高。比如当可能选择为二选一时,如果想要把准确率从80%提高到90%,速度就必须提高一倍。而如果可能的选择由两个增加为四个时,如果想保持与前者一致的传输速度,就只能以将准确率降到65%为代价。应该说,比特率还是一个比较不同BCI系统的一个非常客观的参数。
信息传输率用bit/次和bit/min表示,准确率Accuracy用%表示,并且在可能选择N分别用2、4、8、16、32表示。(https://www.daowen.com)
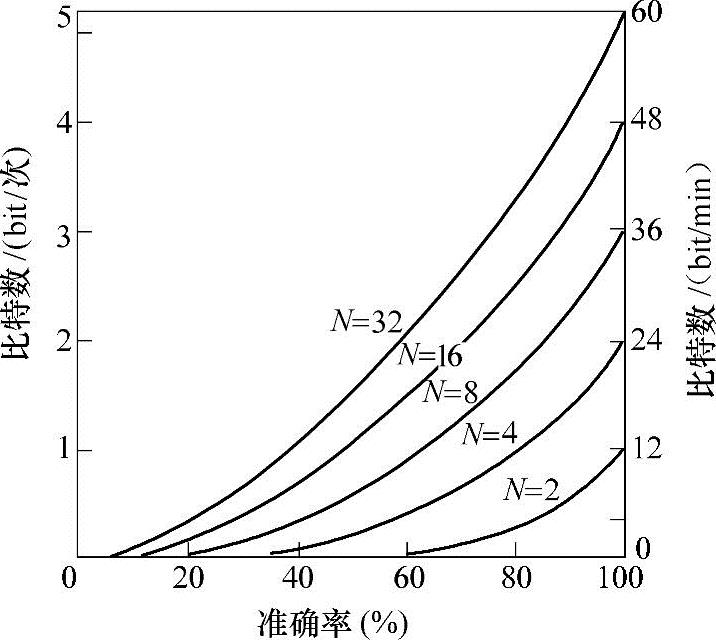
图2-13 信息传递的准确率和速度之间的关系
2.BCI的脑电信号处理算法
脑电信号处理算法就是把BCI获得的输入信号转换成实际设备控制的一系列计算过程。任意的一个脑电信号处理算法都需要有三个关键特征来划分:脑电信号处理函数、适应能力和输出。其中脑电信号处理函数可以是线性的(线性方程),或非线性的(神经网络);算法可以是适应的或非适应的;适应算法可利用手动规律或更精密的机器算法。算法的输出可以是离散的或连续的。不同的现实世界应用是这些脑电信号处理算法不同的根本原因。
目前大量的BCI算法都是服务于头顶记录的EEG,而这种现状都是由于EEG技术是目前唯一可以广泛应用的BCI技术。EEG反映的是众多神经皮质的整体活动,如果想把这种活动所抽象出的输入特征用于有效的沟通,就必须有两个以上可分辨的状态来反应使用者的意志。但是,随着电极嵌入技术的发展,现在的算法将需要更大的发展。
但是,不论脑电信号处理算法的本质和计算能力如何,如果不具备现实应用价值,它都没有存在的意义,就像BCI控制光标活动的精确性和速度只有在具体的选择目标中才有价值。虽然BCI研究涉及的理论性问题对脑科学的探索是有重要揭示作用的,但真正能推动BCI技术是它在现实中对行动上存在严重缺陷的人们的帮助。
为了BCI技术的进一步发展,需要一种比较不同算法的客观方法。即使对同一种应用,甚至同一个BCI系统,想要进行这种比较是非常困难的。但是,如果要采纳特定的应用基准、设置一致的数据,或者使用标准进程,就可以进行合理的比较。由于大脑适应能力和体能差别,脑电信号处理算法的比较需要采用适当的统计方法,并将其应用于众多的用户和相关的应用中。不同的算法适用于不同的应用场合,不见得一种算法就能适用于所有的应用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







