本减速器用于3t焊速变位机,由机械部等一设计院设计,沈阳电工机械厂、上海重型机器厂制造。
设计要求:输出轴传递的转矩T=9000N·m,工作台转速n2=0.0288~0.865r/min;行星减速器传动比i=30.5;电动机功率P=4kW。
电动机转速n1=3000r/min,通过V带和蜗杆传动(i=57),其中蜗轮轴即为偏心轴,由其带动传动比i=30.5的少齿差行星减速器。电动机型号Z2—32,由晶闸管无级变速。
(1)参数选择
z1=61,用滚刀加工,取x1=1.327。
z2=63,用z0=17的插齿刀加工,取x2=1.410。m=6mm,α=20°,ha∗=0.8,C∗=0.3。
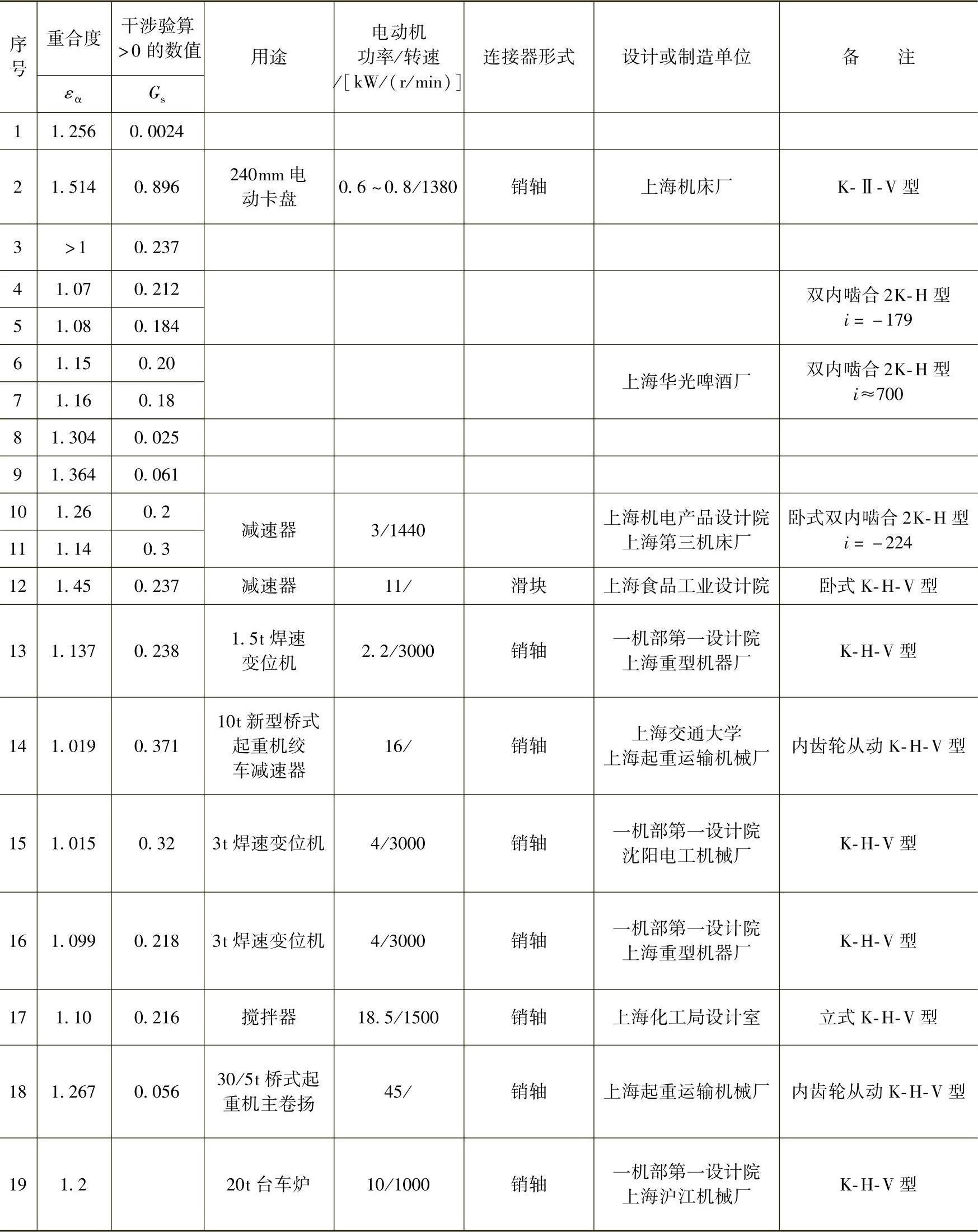
表12-5 两齿差行星齿轮减速器的应用示例
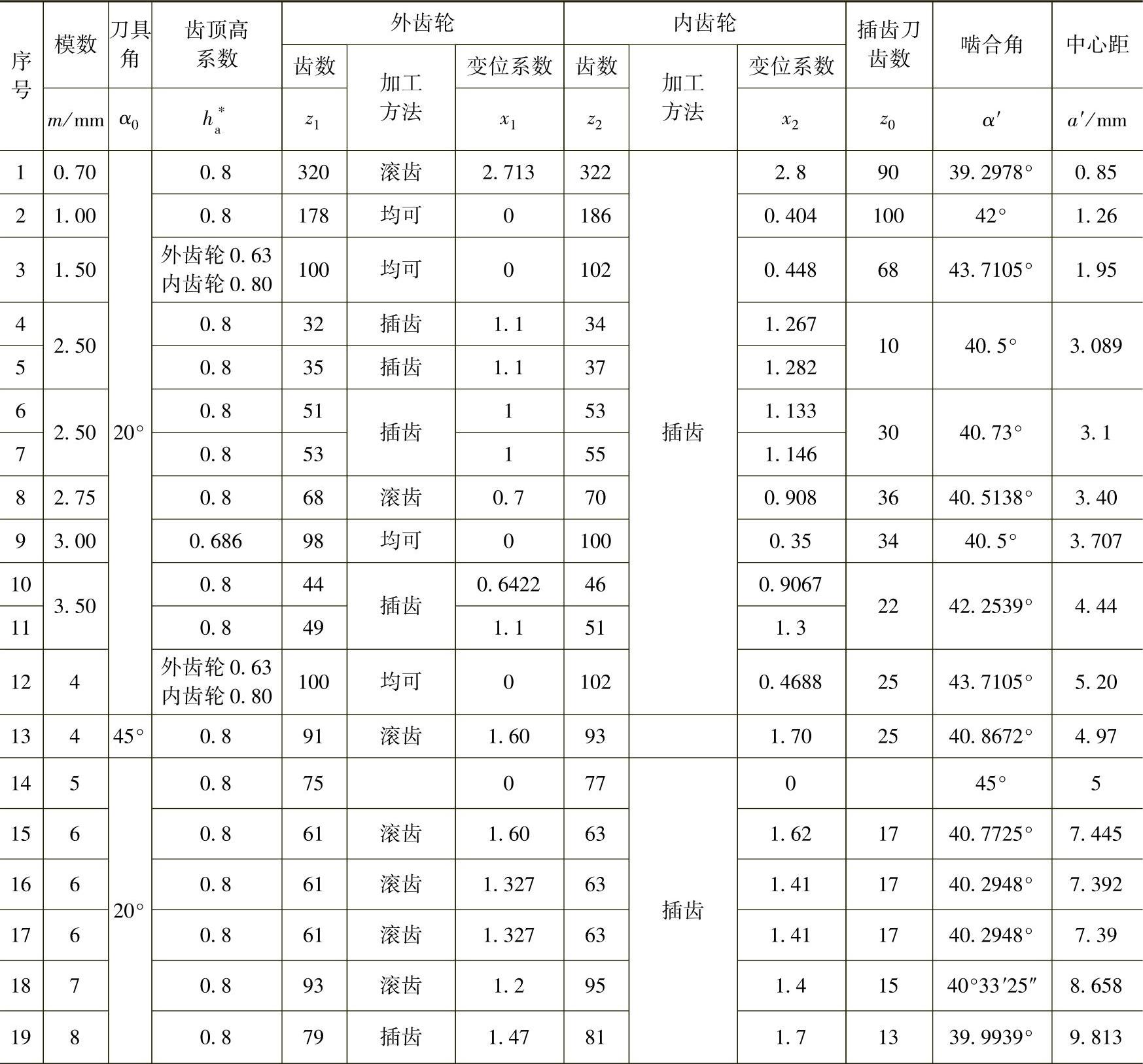
(续)
注:1.z0系指计算时采用的插齿刀齿数,切削齿轮时不受此限。
2.计算时取插齿刀变位系数x0=0,切削齿轮时不受此限。
(2)齿厚增量系数
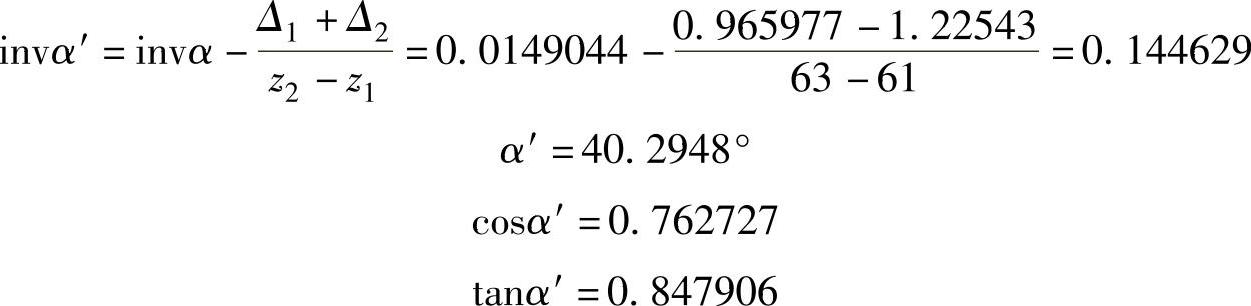
Δ1=2x1tanα=2×1.327×0.36397023=0.96597699
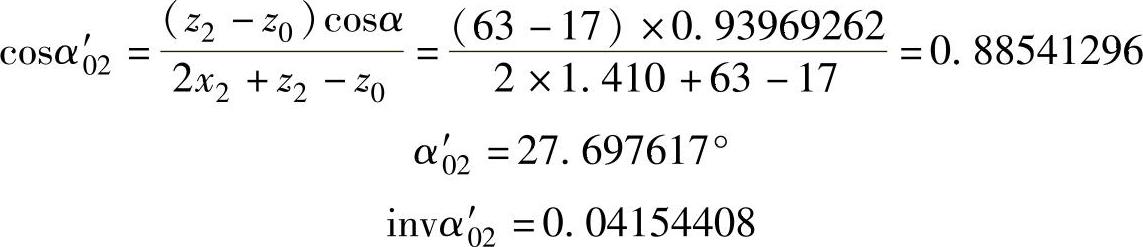
Δ2=(z2-z0)(invα-invα0′2)=(63-17)×(0.01490438-0.04154408)=-1.225426
(3)啮合角的计算
(4)其他几何参数计算
标准中心距 
中心距 
取a′=7.39mm。(www.daowen.com)
中心距变动系数

齿顶高变动系数
Δy=x∑-y=x2-x1-y=1.410-1.327-0.232=0.149(取绝对值)
齿顶高

分度圆半径
基圆半径

齿顶圆半径

(5)安装的必要条件校核
ra2+a′=193.56mm+7.39mm=200.95mm>ra1=194.86mm
满足条件,许可。
(6)齿廓重叠干涉验算
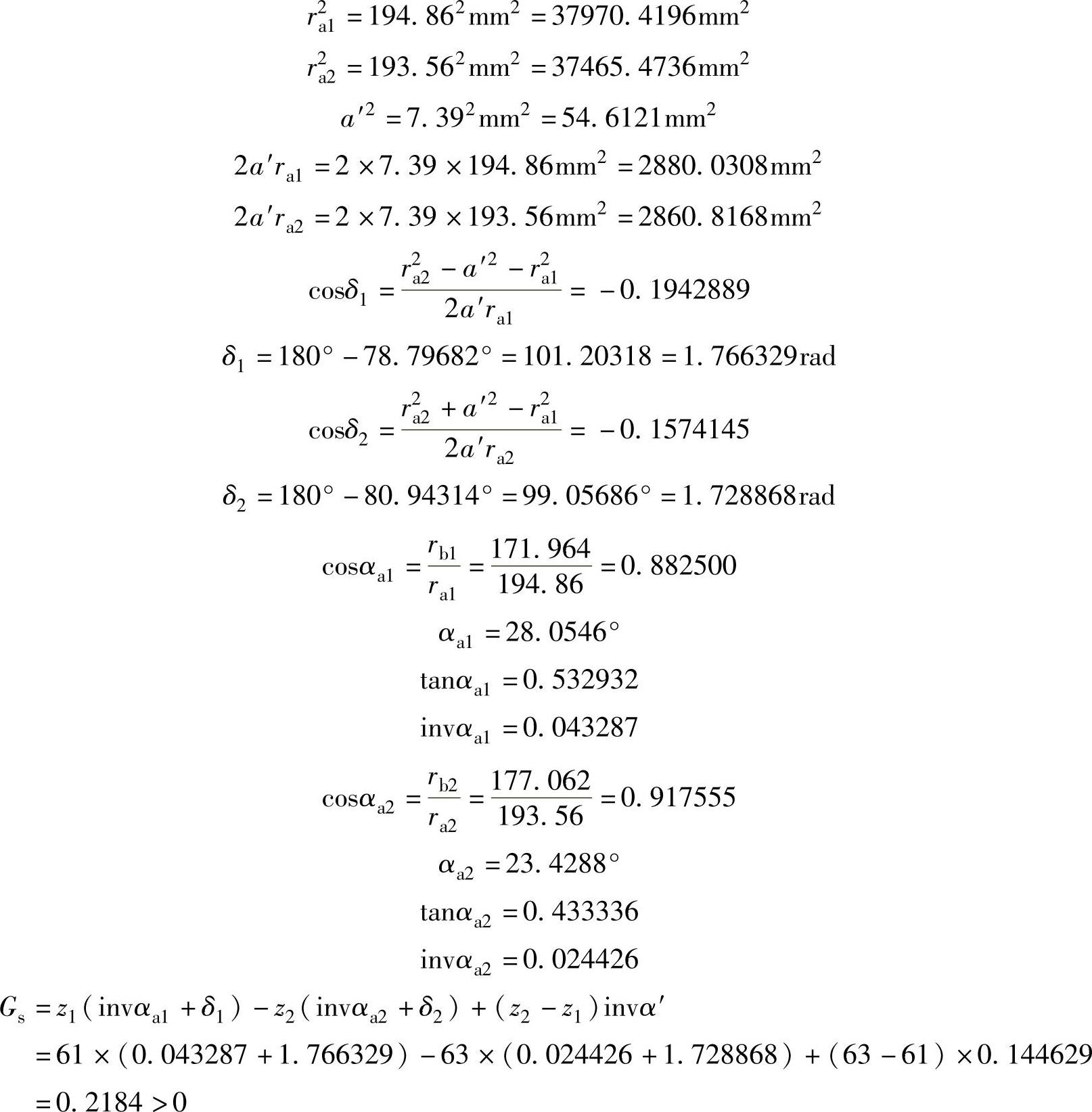
所以,许可。
(7)重合度计算
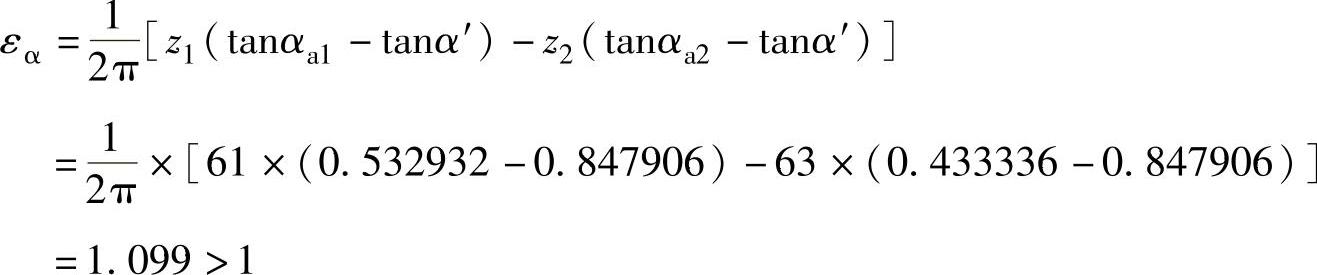
所以,许可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





