【摘要】:假设外齿轮的输出功率为P1,不考虑其方向,取绝对值P1,由于啮合摩擦损失的功率为PT,则啮合效率为式中,P1+PT为输入功率。为了求得比值,现采用啮合功率法。在原行星轮系中,外齿轮所传递的功率为P1=T1ω1=F′t1r1′ω1PH1与P1的比值为由于PH1与P1同符号,所以在转化机构中外齿轮为从动轮,PH1为输出功率。从式或图10-8可以看出,啮合效率ηM1随着iH1的增大而降低。图10-8 K-H-V型减速器的啮合效率ηM1
假设外齿轮的输出功率为P1,不考虑其方向,取绝对值P1,由于啮合摩擦损失的功率为PT,则啮合效率为

式中,P1+PT为输入功率。
为了求得比值 ,现采用啮合功率法。在转化机构中,外齿轮所传递的转矩T1,等于原行星轮系中该轮所传递的转矩F′t1r1′。
,现采用啮合功率法。在转化机构中,外齿轮所传递的转矩T1,等于原行星轮系中该轮所传递的转矩F′t1r1′。
PH1=T1ωH1=F′t1r1′(ω1-ωH)
式中 PH1——啮合功率;
F′t1——内齿轮作用在外齿轮节圆上的圆周力;
r1′——外齿轮节圆半径。
在原行星轮系中,外齿轮所传递的功率为
P1=T1ω1=F′t1r1′ω1
PH1与P1的比值为

由于PH1与P1同符号,所以在转化机构中外齿轮为从动轮,PH1为输出功率。假定PTH为转化机构中的啮合摩擦损失的功率,则转化机构的啮合效率为

从上式可解得

根据啮合功率法的假定,行星轮系与转化轮系中的摩擦损失近似相等,则(www.daowen.com)

现将式(10-19)两端取绝对值和式(10-22)相乘得

即

将式(10-23)代入式(10-18)得

由于iH1为负值,所以1-iH1=1+iH1,代入上式并经整理后可写成:

或

式中,ηH为转化机构的啮合效率,近似等于定轴轮系的啮合效率ηM,一般取ηH≥0.996。
当取ηH=0.996时,根据公式(10-24)可作出ηM1与iH1的关系曲线,如图10-8所示。
从式(10-24)或图10-8可以看出,啮合效率ηM1随着iH1的增大而降低。因此对大传动比,为了获得高效率,不宜采用单级传动,可采用两级或多级传动。
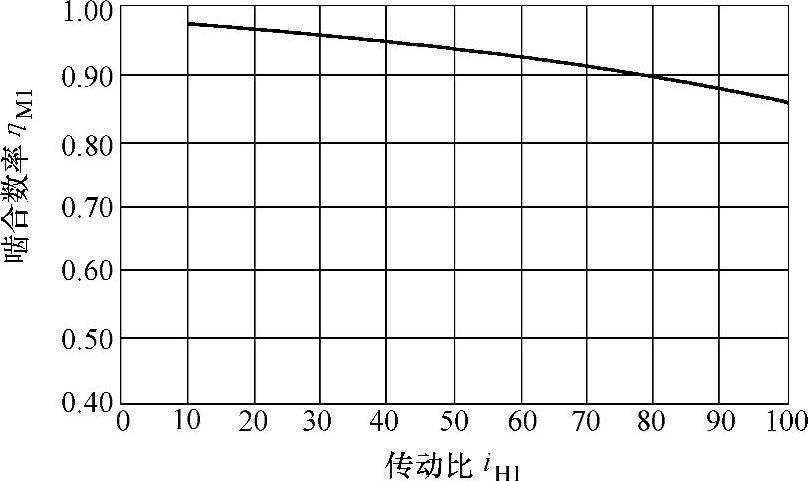
图10-8 K-H-V(N)型减速器的啮合效率ηM1(ηH=0.996)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关渐开线少齿差行星齿轮传动装置的文章







