由公式 可知,当z2-z1=0,α′=90°时,一般的几何计算公式不适用,因为z∑=z2-z1=0、α′=90°,上面公式变成不确定的,但可利用图6-1,得到不定式的展开计算式。
可知,当z2-z1=0,α′=90°时,一般的几何计算公式不适用,因为z∑=z2-z1=0、α′=90°,上面公式变成不确定的,但可利用图6-1,得到不定式的展开计算式。
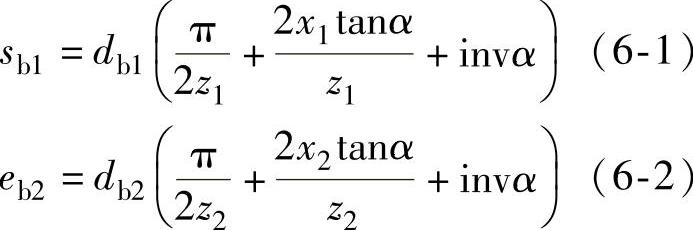
如果齿轮z1、z2的中心线与齿轮2的齿槽、齿轮1的轮齿对称线重合时,则其齿廓位于等距线之间,并形成侧隙,其沿齿廓法线方向的大小,等于沿基圆方向齿轮2的齿槽宽与齿轮1的齿厚之差的一半,可由下式确定:
为了得到无侧隙啮合,需将一齿轮相对另一齿轮平移一侧隙大小,其中心距为

因为在这种情况下,db1=db2、z1=z2,经变换后得
a′=m(x2-x1)sinα (6-4)
如果涉及大、小齿轮的切向变位(小齿轮的切向变位系数为xτ1、内齿轮为xτ2)形成侧隙在内,则中心距a′应为

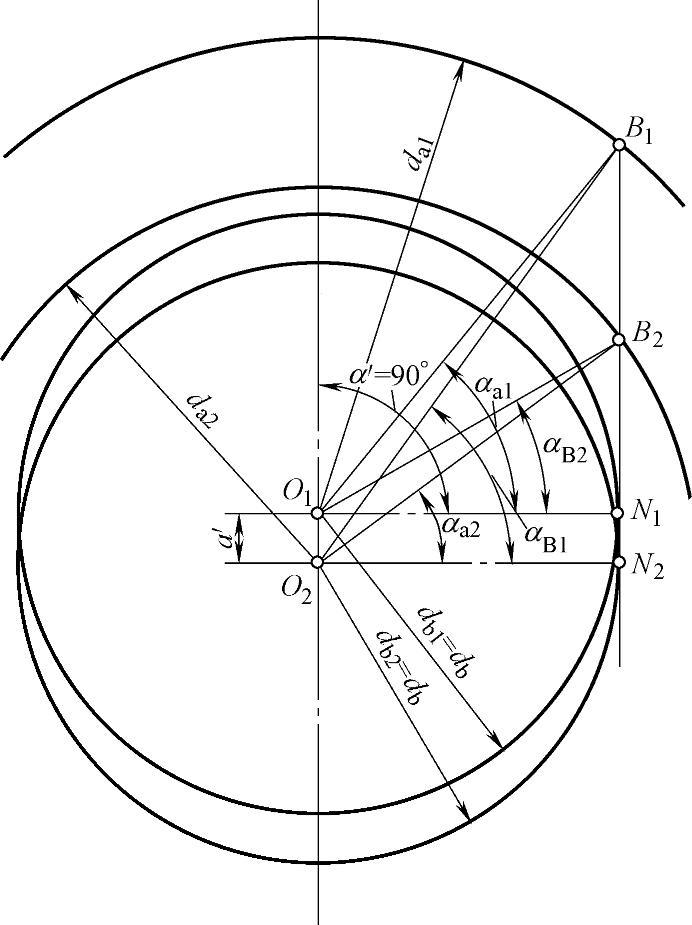
图6-1 当z1=z2、α′=90°时,内啮合齿轮副参数的确定
式中 jn——啮合侧隙(见图6-2),设计时可按jn=0进行。
根据图6-1也可确定重合度。当不考虑齿轮的切向变位时,则
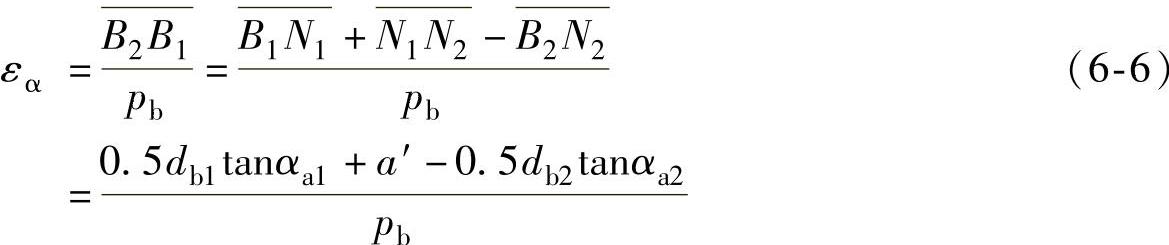
经变换后,得

齿廓工作部分起始点的压力角由下式确定:
 (www.daowen.com)
(www.daowen.com)
变换后,得

同理得

其他几何计算和一般内啮合传动的计算没有什么区别,通常是按几何指标校核啮合质量,只有齿廓重叠干涉无需校核。这种形式的干涉,在本传动中原则上不可能产生的,因为齿轮1的每一轮齿始终保持在齿轮2的同一齿槽中。
z∑=0的传动具有特殊的特性,在啮合线上的滑动速度是不变的,则
vs=a′w (6-10)
变位系数的选择根据封闭图确定。图6-3所示为典型封闭图之一,是根据顶隙保持不变
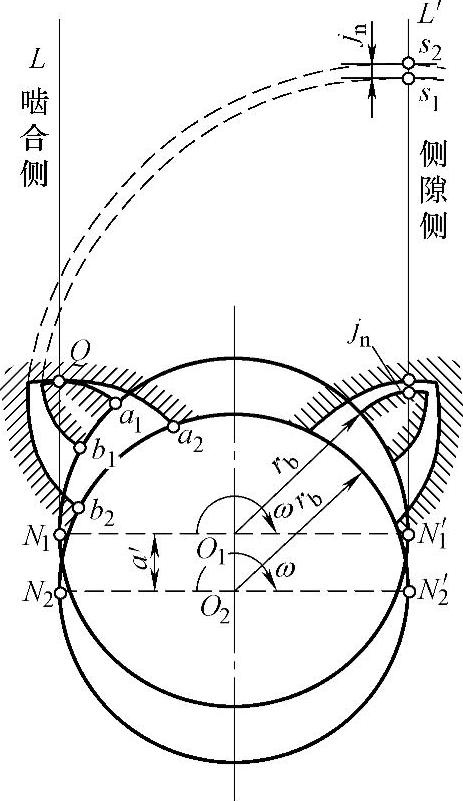
图6-2 零齿差变位渐开线内齿轮啮合
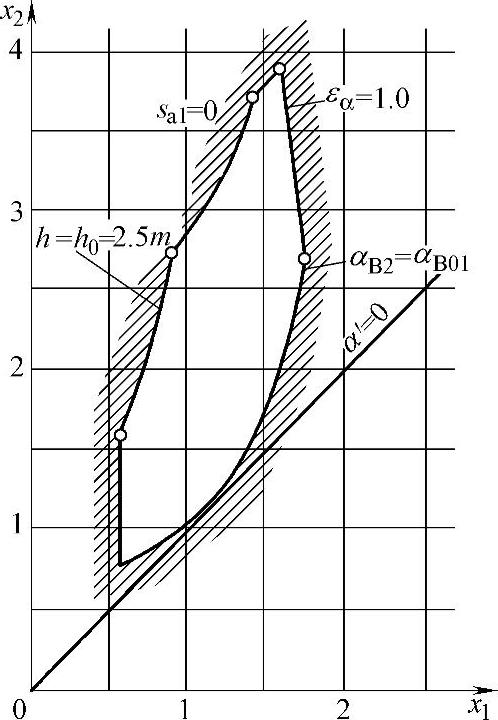
图6-3 当z1=z2=30,α′=90°、z0=15、x0=0.104时,内啮合齿轮副的封闭图
的计算系统拟制的。其中外齿轮1用滚刀加工,内齿轮用z0=15、x0=0.104标准插齿刀加工。从中可以看出,传动的可能性组合,变位系数具有很大的变化范围。
图6-4所示为零齿差z∑=0的传动简图。当齿轮中心线固定时,这种传动可用作联轴器,连接两平行且不同心的轴。在行星传动中,行星轮作平动,并且其任意点的轨迹是直径为2a′的圆。
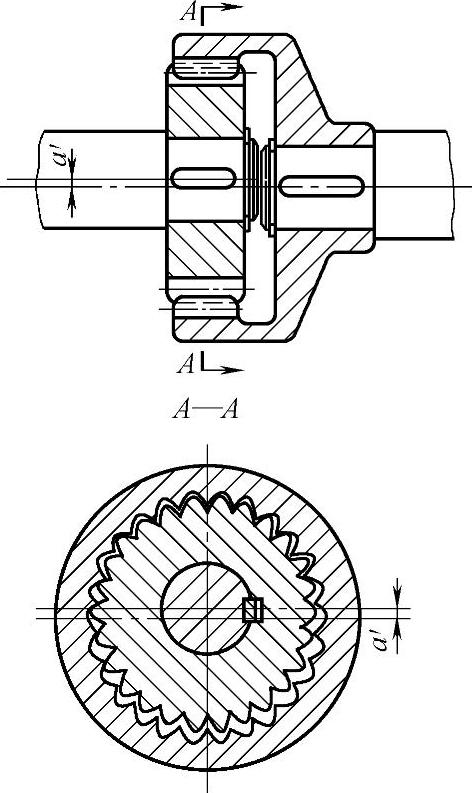
图6-4 零齿差内齿轮副
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





