随着计算机的普及,借助计算机的辅助设计与分析,将变位系数的选取和齿轮其他参数一起用计算机完成,列成表格,直接查表选用,十分方便。计算原则是在选取变位系数时,既要满足Gs>0,但也不宜过大,预先给定一个很小的值,Gs=0.05,然后解出变位系数与齿轮其他参数。显然这样做使重合度提高,变位系数减小,较为合理。
图5-10
图5-11
图5-12
图5-13
图5-14
图5-15
图5-16
图5-17
图5-18
图5-19
图5-20
图5-21
图5-22
图5-23
图5-24
图5-25
目前较流行的是按啮合角最小的要求,确定少齿差内啮合的变位系数;以及啮合角已知时,变位系数的确定。现将这两种方法作一论述。
(1)按啮合角最小的要求确定少齿差内啮合齿轮副的变位系数
根据分析,齿数差很少的内啮合,其啮合角的最小值,由限制条件εα、Gs、sa1所决定。为减小啮合角,应取三条曲线中某两条曲线的交点作为变位系数。
首先分析εα与Gs两条曲线的交点。根据前面的论述,εα和Gs应满足的条件如下:

设计时,εα可以取大于1的所需值,在此我们取εα=1求解作为示例,即

设计时,Gs可取大于零的所需值,作为示例,在此取Gs=0求解,即

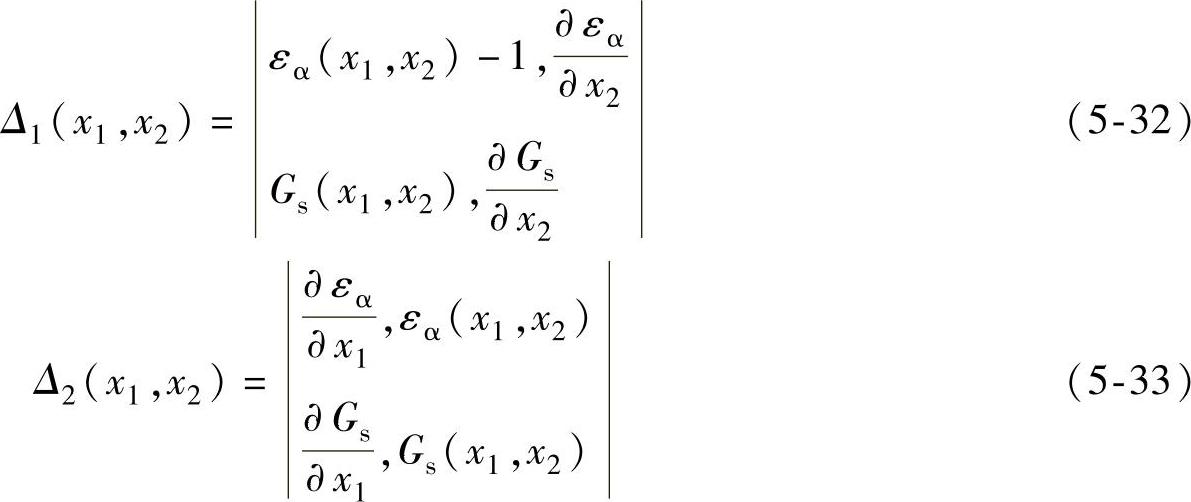
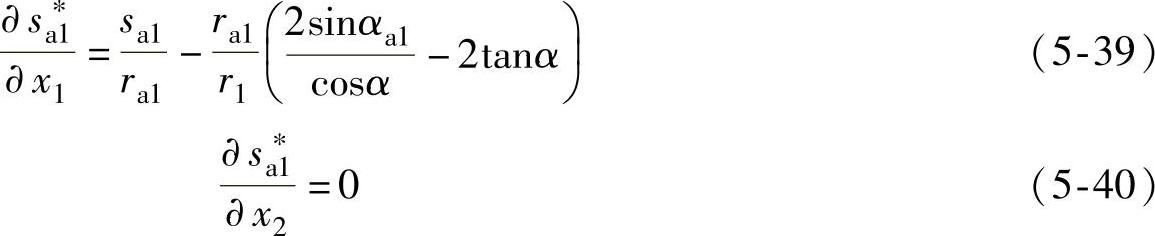
把变位系数x1、x2作为独立变量,把α′作为中间变量,因α′可由啮合方程作为x1、x2的已知函数。用牛顿法求解,其迭代程序为

式中 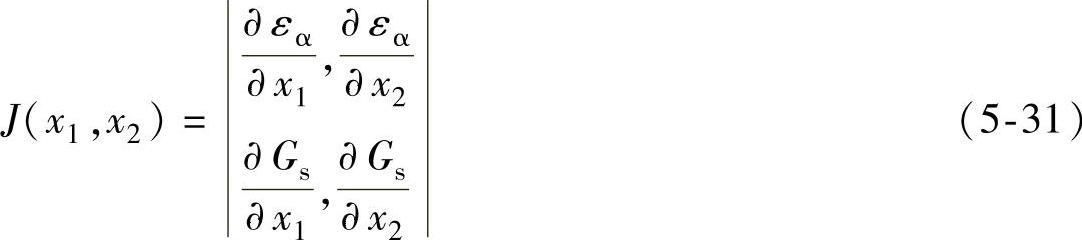
计算时,只要初始值(x1(0),x2(0))选得充分接近方程组(5-27)、(5-28)的精确解(x1,x2),牛顿方程(5-29)和方程(5-30)就会收敛。
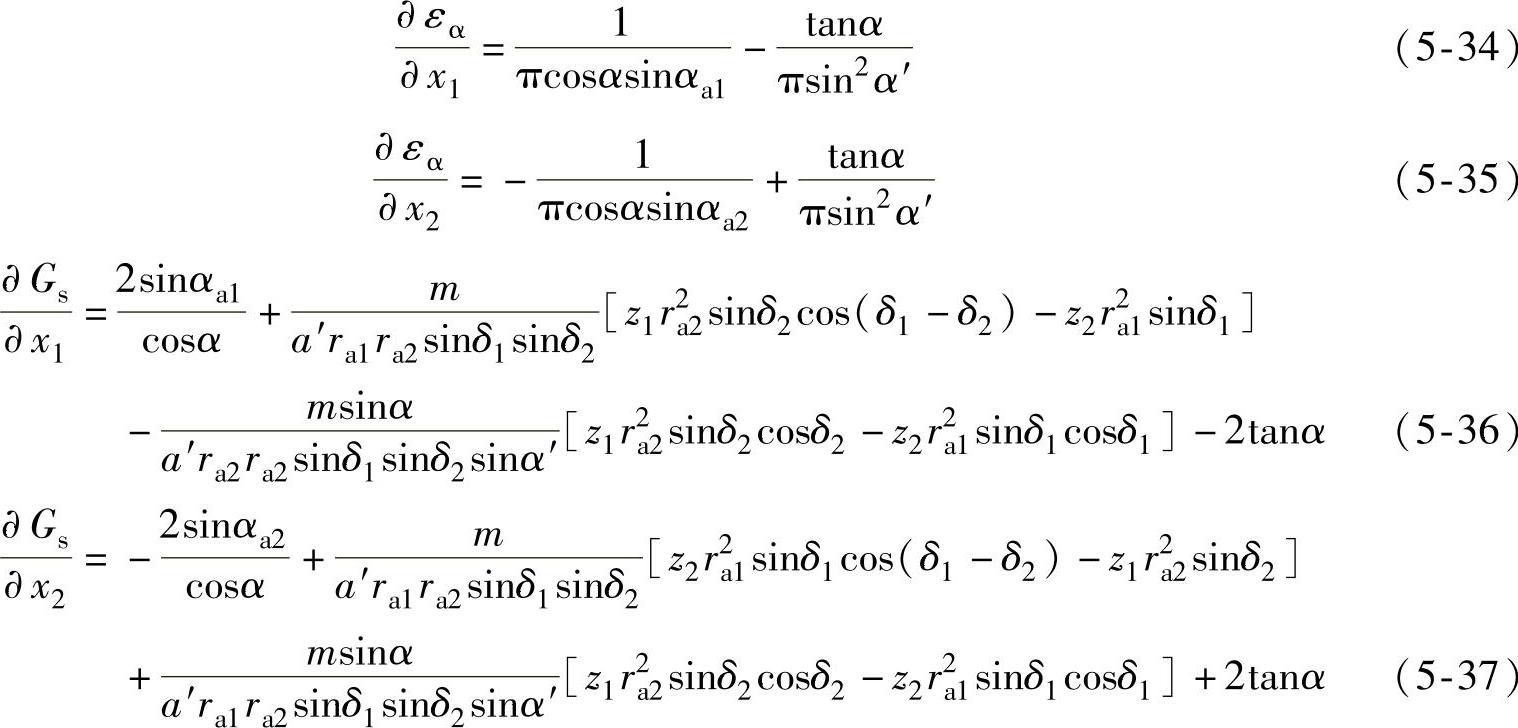
当齿顶圆半径用
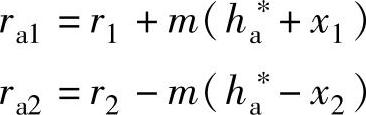
计算时,行列式元素是:
由式(5-29)及(5-30)所求得的x1及x2,即为图5-26中的交点T。此点是否满足sa1的需求,尚须验算,验算式如下:(www.daowen.com)

设计时,s∗a1可取大于零的所需数值。
若T点不能满足式(5-38)的要求,则αmin在Gs与s∗a1的交点(见图5-27),求解此交点的方法与上述相同,但需要用到下列行列式元素,即
需要指出的是,上述各行列式元素是当齿顶圆半径用ra1=r1+m(ha∗+x1)及ra2=r2-m(ha∗-x2)计算时推导的。若齿顶圆半径用其他公式计算,则行列式元素也要另行推导。
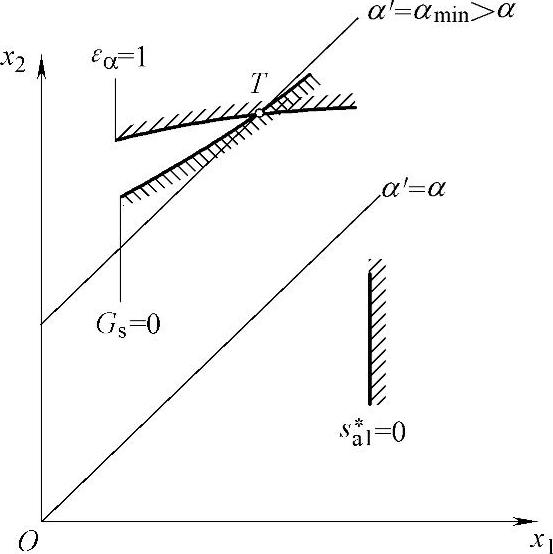
图5-26 图示限制条件下的变位系数
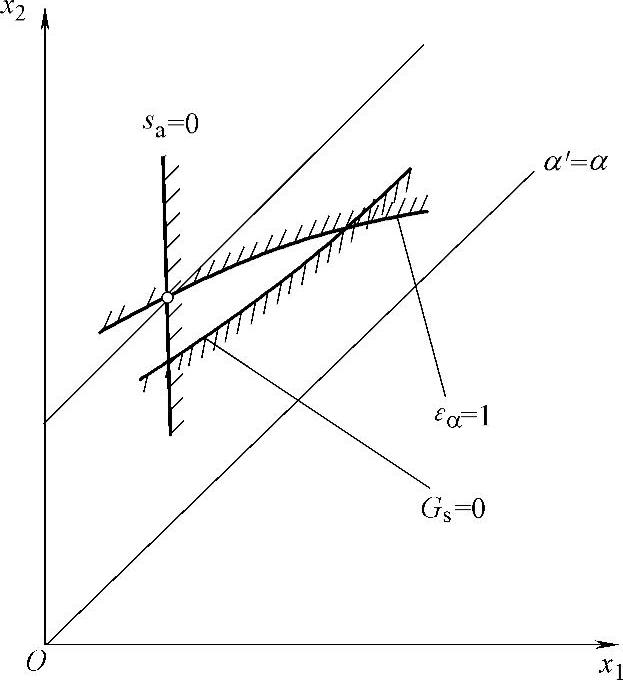
图5-27 图示限制条件下的变位系数
【例5-1】 内啮合齿轮副,z1=56,z2=60,ha∗=0.8,α=20°,试求εα=1及Gs=0时的变位系数x1及x2。
解 取x1(0)=1及α′=40°。
由啮合方程得x2(0)=1.3463566,此时εα=1.139236,Gs=0.1464。
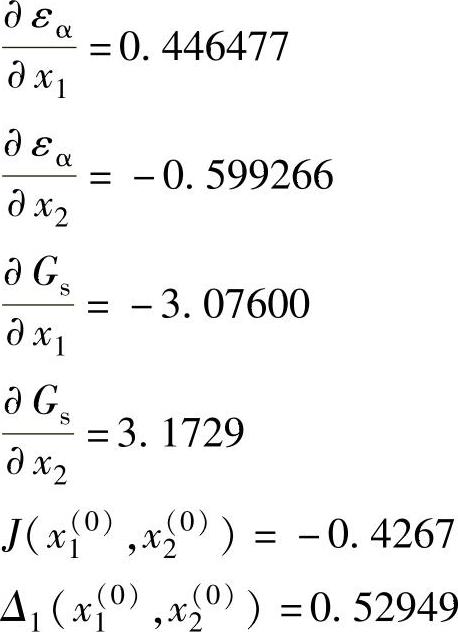
Δ2(x1(0),x2(0))=0.49364
代入式(5-29)及式(5-30),求得
x1(1)=2.2409
x2(1)=2.5033
α′=37.26°
εα=1.037
Gs=-0.021
按此方法迭代,最后得到的结果是:
x1=2.676
x2=2.935
α′=37.131°
εα=1.00
Gs=0.00
(2)啮合角已知时变位系数的确定
在少齿差内啮合齿轮副的设计中,只要选取适当的啮合角,就能同时达到εα>1及Gs>0的要求。如图5-28所示,当α′不变时,由啮合方程可作出倾斜45°的直线,在A—B之间选取变位系数时,便同时能满足上述两项限制条件的要求(对于一个设计,在需要时,可另行验算s∗a1)。
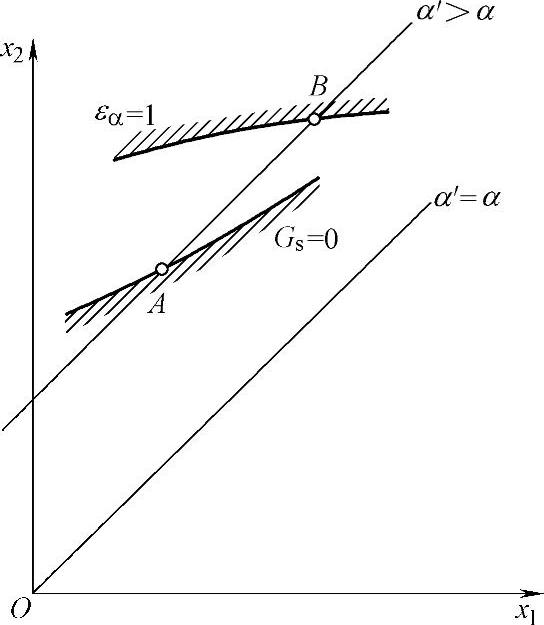
图5-28 图示限制条件下的变位系数
由于α′=常数,使问题得到简化,可以用牛顿法求得εα或Gs达到某一预期值时的变位系数。当欲使Gs达到某一预期值,迭代程序如下:

式中,[Gs]为Gs的预期值,在设计时,取[Gs]=0.05左右。
当齿顶圆半径用
计算时,由推导得

上式第二项可以简化。由于ra1sinδ1=ra2sinδ2,并取z1ra2≈z2ra1,在推导过程中,再取mz2≈2ra2, ,则式(5-42)可简化为
,则式(5-42)可简化为

简化以后的导数式十分简单,而不增加迭代次数。
若是按重合度的预期值[εα]确定变位系数,只需将式(5-41)中的Gs易为εα及[Gs]易为重合度的预期值[εα]即可。详见例5-2。导数计算式为

【例5-2】 内啮合齿轮副,m=3mm,α=20°,z1=51,z2=52,ha∗=0.6,[εα]=1.05,试求当α′=49°时x1、x2的值。
解 取x1的初始值,x1(0)=0,则
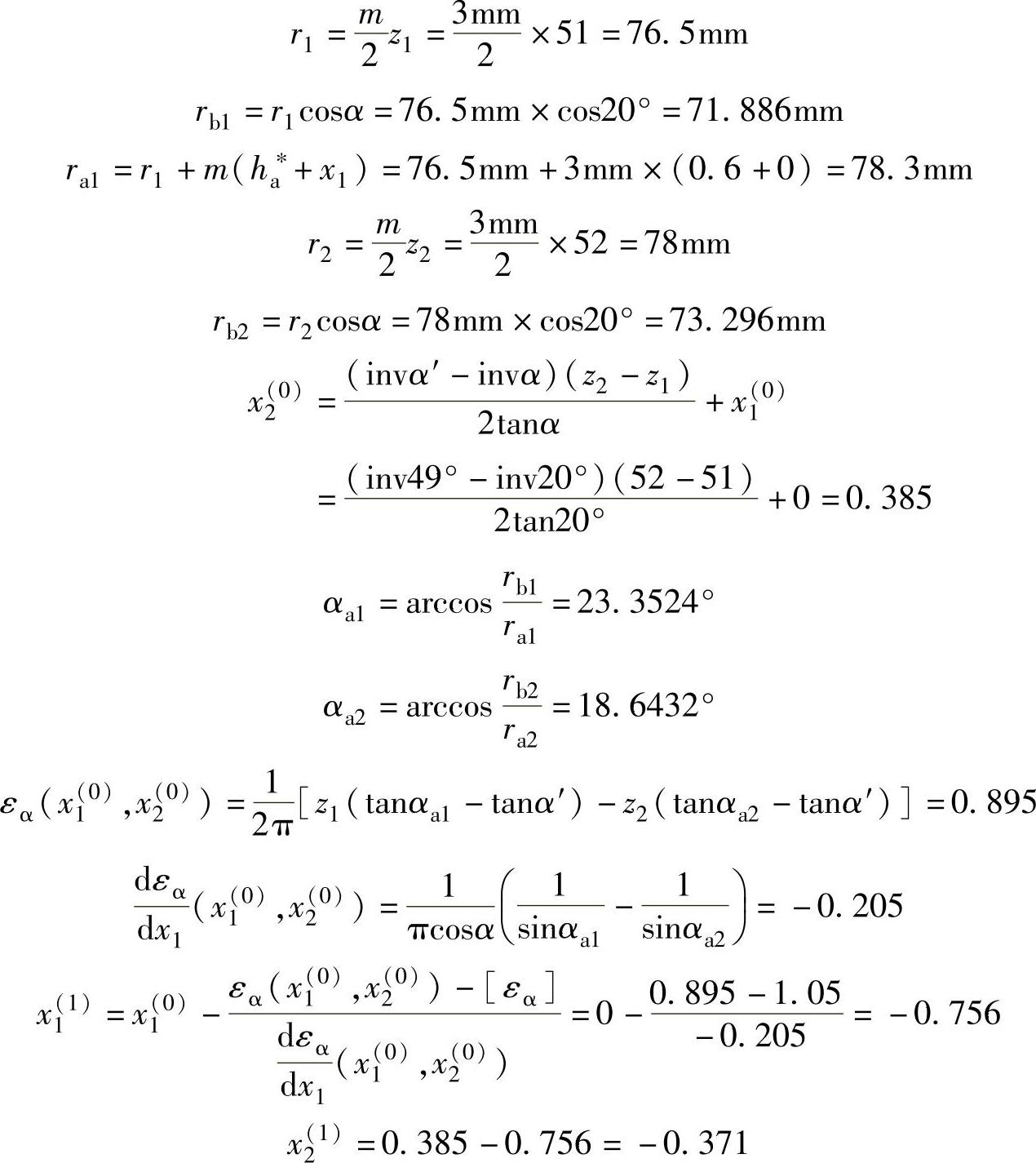
以下按上述顺序继续计算得到
计算至此已满足预期要求,迭代终止。验算齿廓重叠干涉,得到Gs=0.08,满足要求。
关于初始值x1(0)的选取颇为重要。初始值越接近精确解,越不易出现其他问题。但在计算开始时,并不知道精确解。因此,建议先取x1(0)=0试算。如果计算中出现rb1≥ra1时则增大x1(0)重新计算,用计算机计算时步长可取0.1,手算时步长可稍大些;若在齿廓重叠干涉验算中,出现cosδ1或cosδ2大于1,应立即改取x1(0),重新计算。
当ha∗取得越小时,满足εα或Gs要求的x1也越小,但此时εα或Gs却增大了。这就意味着,同一对齿轮,若取较小的ha∗,可使啮合角减小。由于x1为负值时,还需要考虑避免根切,所以通常在设计时,取ha∗的最小值为0.6。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






