一对齿轮啮合时,当前一对轮齿脱开之前,后一对轮齿应当已经进入啮合,这是一对齿轮连续而平稳工作的重要条件。关于这一指标,通常用重合度大于1来表示。
所谓重合度εα,是指实际啮合线长度 与基圆齿距(基节)pb的比值,即
与基圆齿距(基节)pb的比值,即

 称为实际啮合长度,可用齿轮的有关参数表示。由图4-13可知:
称为实际啮合长度,可用齿轮的有关参数表示。由图4-13可知:
 ,由正弦定律得到
,由正弦定律得到
而基节pb=πmcosα。将各值代入式(4-48)并整理后,便得到
 (https://www.daowen.com)
(https://www.daowen.com)
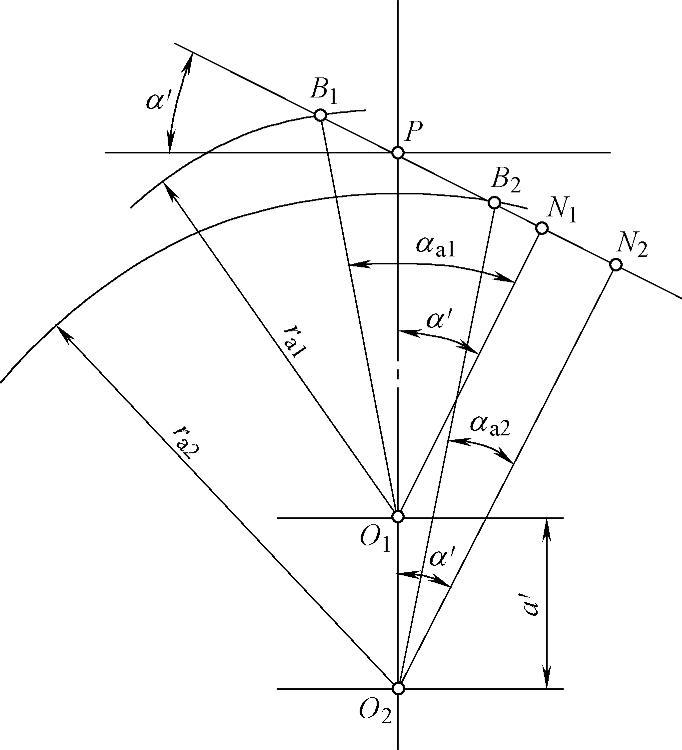
图4-13 重合度的计算
重合度εα>1是保证连续传动的必要条件。对于外啮合传动的重合度εα,在设计时应使εα=1.1~1.4。内啮合比外啮合的重合度大,一般的标准齿轮或是xΣ不太大的变位齿轮传动,重合度是能够保证的。只有在齿数差很少的内啮合中,因采用较大的xΣ,也就是啮合角α′较大,从而使实际啮合线缩短,使重合度明显减小。因此,在内啮合传动中,从理论上分析,重合度也应该大于1。但是对于内啮合齿轮,尤其是少齿差内啮合传动,与啮合的齿相邻的另一对齿,即使尚未进入啮合状态,也是极为靠近的。当齿数多而齿数差很少时更是如此,类似于齿轮联轴器。例如z1=160,z2=162,m=1.5mm时,通过计算得知,从节点P算起在齿轮的第三个齿上,同内齿轮之间的啮合弧相隔距离不到 。国内有几家单位对多齿接触问题做过试验,证明在啮合瞬时,由于轮齿存在着弹性变形,不止一对齿发生接触,而是同时有几对齿发生接触。华东理工大学用电测法进行动态测试。试验了八台不同参数的少齿差行星减速器接触齿对数。图4-14是其中测试时轮齿根部应力示波曲线。齿轮参数为m=3.5mm,z1=63,z2=64,输出转矩T2=600N·m,重合度εα=1.003。
。国内有几家单位对多齿接触问题做过试验,证明在啮合瞬时,由于轮齿存在着弹性变形,不止一对齿发生接触,而是同时有几对齿发生接触。华东理工大学用电测法进行动态测试。试验了八台不同参数的少齿差行星减速器接触齿对数。图4-14是其中测试时轮齿根部应力示波曲线。齿轮参数为m=3.5mm,z1=63,z2=64,输出转矩T2=600N·m,重合度εα=1.003。
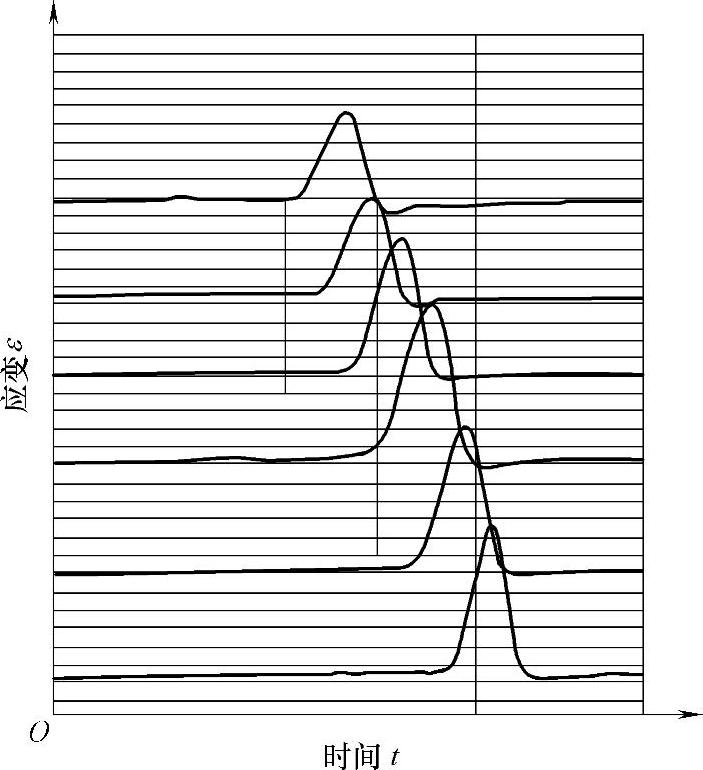
图4-14 动态测试示波曲线
在实际测试中,即使理论重合度εα=1.1,模数m=2.25mm,z1=100,z2=102,Gs=0.05,瞬时接触齿的对数随着负载的增大竟达至5~6对。国内曾制造过5kN的电动葫芦,采用一齿差内齿轮副,z1=41,z2=42,m=3mm,εα=0.877。虽然重合度εα<1,但经几万次负载起吊试验,证明符合使用要求。以上事实说明了少齿差内齿轮副重合度即使小于1,也能运行这一现象。但严格来说,多齿接触并不等于多齿啮合。从传动的连续性和平稳性而言,还是希望多对齿啮合,即重合度越大越好。因此,在少齿差行星齿轮传动中,仍将εα>1作为设计要求的条件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





