双内啮合2K-H(NN)型正号机构少齿差行星传动的传动比计算,可分为下列三种情况:
(1)图3-3所示的传动形式 其结构图如图2-13所示。内齿轮4固定,即n4=0,内齿轮2与行星外齿轮3连成一体,即n2=n3,外齿轮1连同低速轴输出,计算iH1。
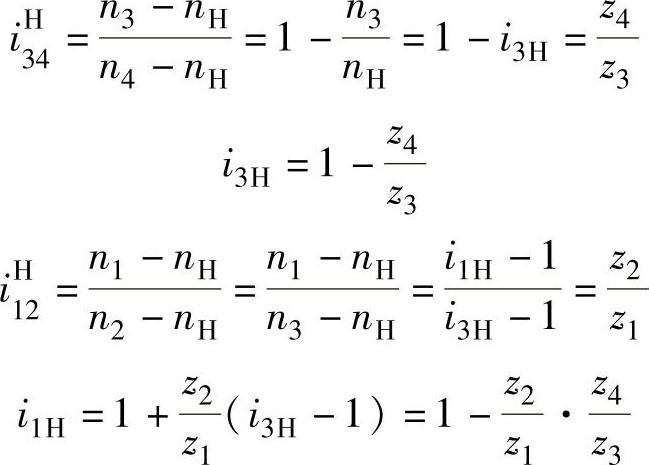

式中,(z4-z3)>0,(z2-z1)>0。
从式(3-3)可知,当齿数差确定后,可调整齿轮1、3,或齿轮2、4的齿数来获得所需的传动比。输入与输出转向相反。
(2)图3-4所示的传动形式 其结构如图2-14所示。外齿轮1固定,即n1=0,内齿轮2与行星外齿轮3连成一体,即n2=n3,内齿轮4输出,则
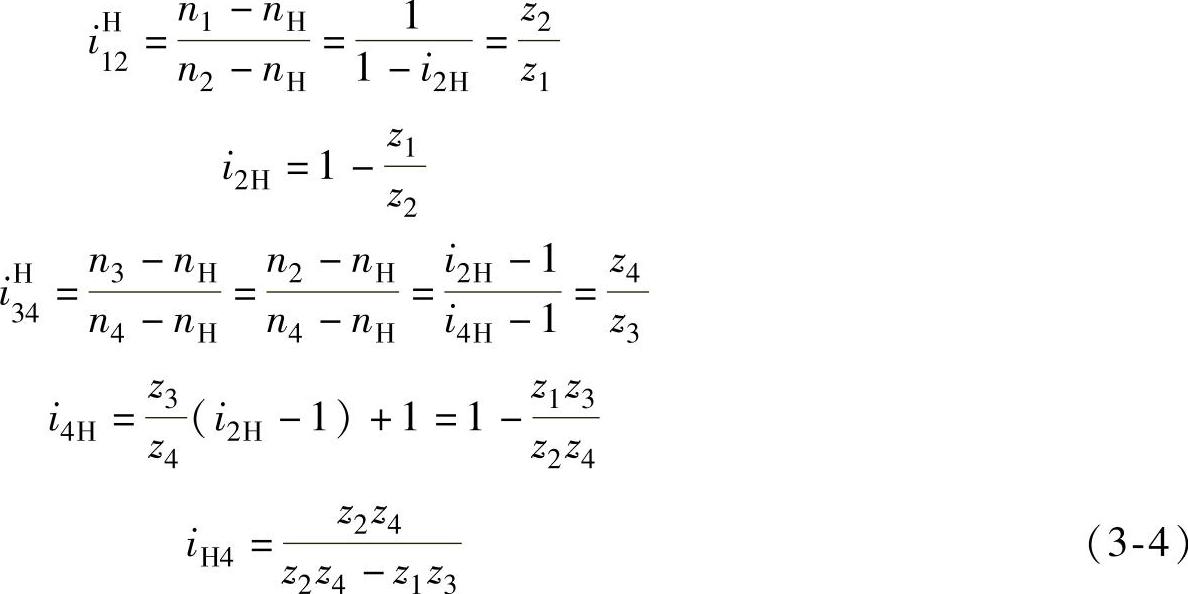
式中,z4-z3>0,z2-z1>0。
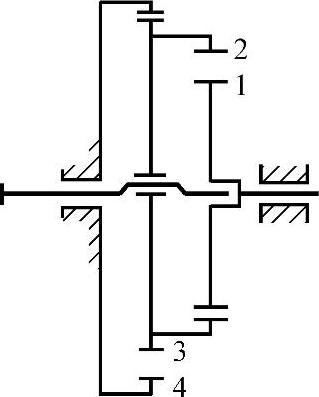
图3-3 2K-H(NN)型传动(内齿轮固定)
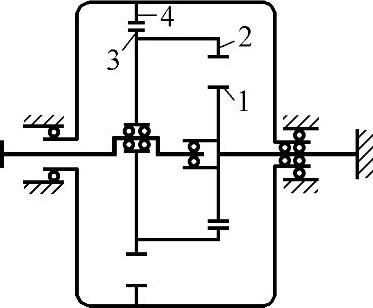
图3-4 2K-H(NN)型传动(内齿轮输出)
从式(3-4)可知,内齿轮4连同机壳输出,输入轴与输出轴转向相同。
(3)图3-5所示的传动形式 其结构图如图3-6所示,内齿轮4固定,即n4=0,两个行星外齿轮2、3连为一体,即n2=n3,内齿轮1作低速输出,其传动比计算式与式(3-3)相似,即

其中z4-z3>0,z1-z2>0。
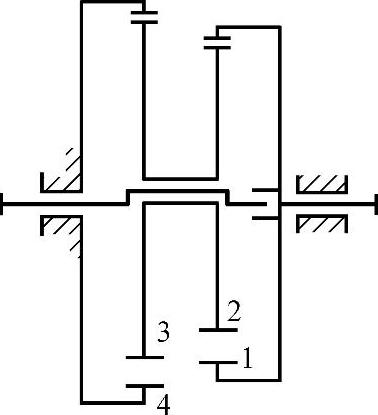
图3-5 2K-H(NN)型传动(以内齿轮工作低速轴输出)
这种传动形式,根据z1与z4选取的不同,可设计成输入与输出转向相同或相反。并且可通过搭配使(z2z4-z1z3)值很小,从而获得比K-H-V(N)型减速装置更大的传动比。
若两对齿轮的模数相同时,则齿数差一般也取相同值,即均为z∑,这样容易得到相同的中心距。
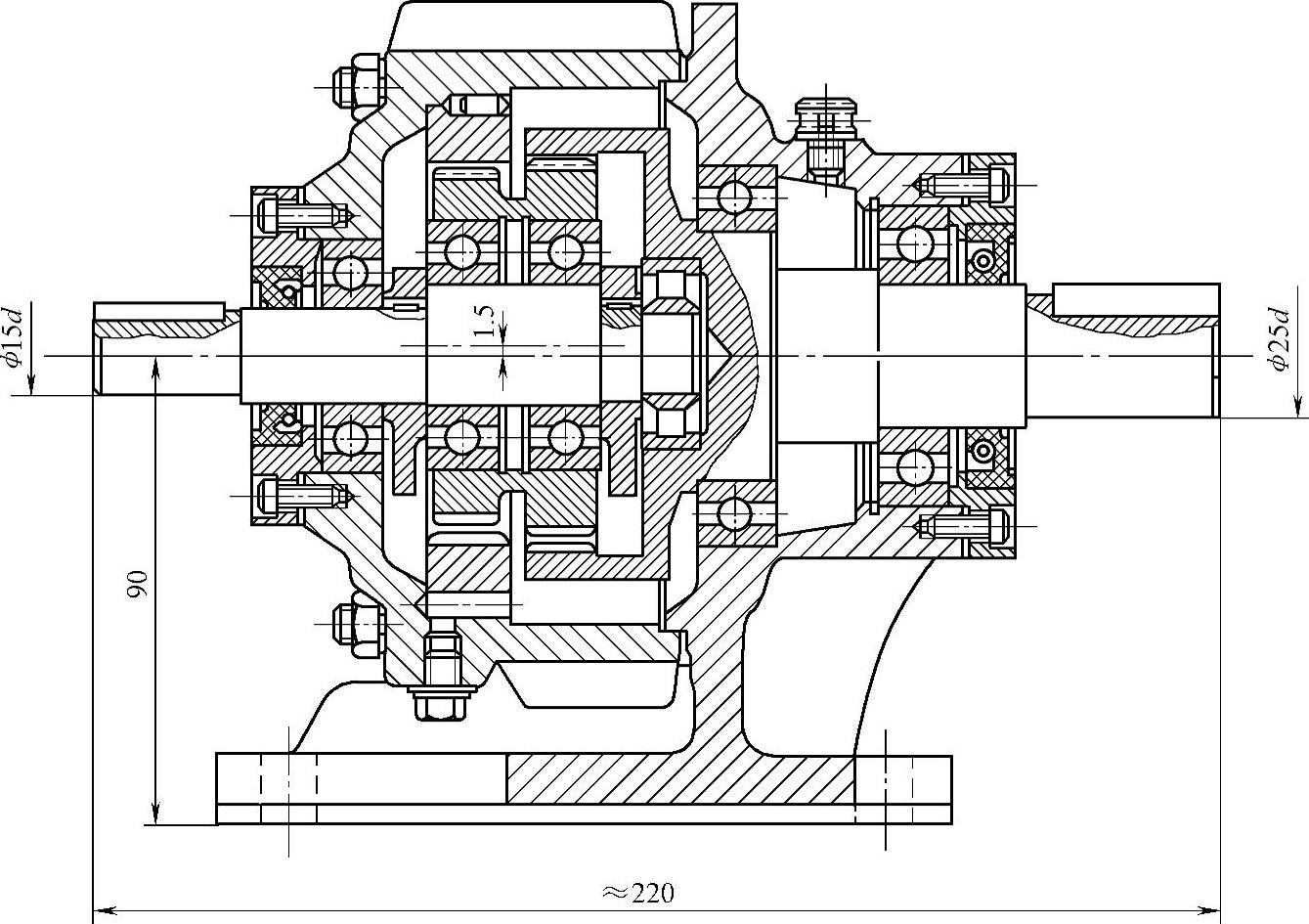
图3-6 2K-H(NN)型传动(以内齿轮输出)结构图
对于图3-5所示的传动机构,输入轴与输出轴的转向关系确定方法如下:当两对齿轮的齿数差相同时,式(3-5)中的z1z3-z2z4=z1(z4-z∑)-z2z4=z∑(z4-z1),当z4>z1时,则iH1>0,即nH与n1的转向相同;当z4<z1时,iH1<0,即nH与n1的转向相反。
设计时,往往是根据已知的传动比iH1来确定四个齿轮的齿数。若完全用试凑法,则盲目性太大。下面介绍一种计算方法。
取z4-z3=z1-z2=z∑,z4-z1=z3-z2=ze,则式(3-5)可写成

若iH1、z∑和ze已知,上式中只有z4是未知数,故可以求出z4。将式(3-6)整理后求根,得到z4的计算式为

但应注意,在ze=0时,式(3-7)不适用。
【例3-2】 已知iH1=200,z∑=2,ze=4,求各齿轮齿数。
解 按式(3-7)求z4,即
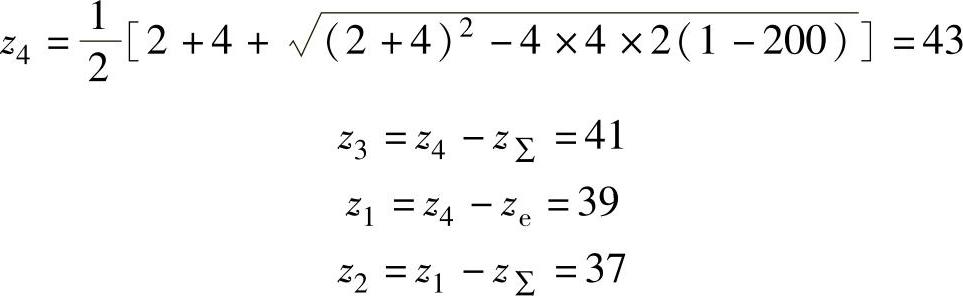
验算传动比(https://www.daowen.com)

【例3-3】 已知iH1=-200,z∑=2,ze=-4求各齿轮齿数。
解 按式(3-7)求z4,即
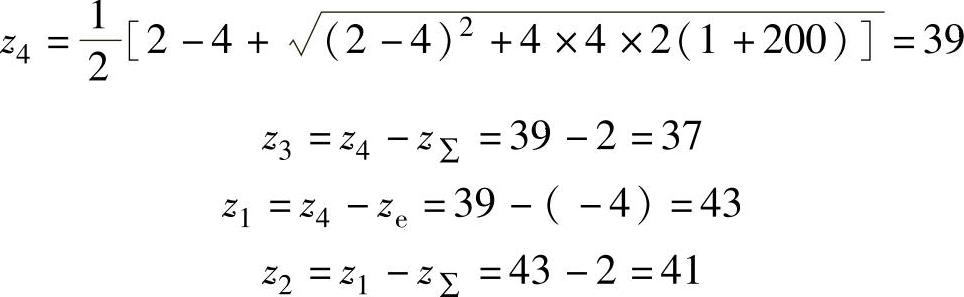
验算传动比
iH1=-198.9
为了使z4的计算式再简单一些,当z4>z1,即ze>0时,可取

则 
【例3-4】 用式(3-9)计算例3-2中的z4。
解 
结果与用式(3-7)计算得出的结果相同。当z∑及ze改变时,用两种计算式计算的结果也可能出现不大的差异。
此方法是南京自动化技术研究所提出的。
当z4<z1即ze<0时,尚无较准确的简单近似计算方法。
外齿轮输出的2K-H(NN)型少齿差行星传动(见图3-3),其传动比计算为

式(3-10)与式(3-3)相同,由于z4>z3及z2>z1,故iH1值小于零,则nH的转向始终与n1的转向相反。
根据已知的传动比确定各齿轮齿数的方法如下:
由式(3-10)得到

当iH1、z∑和ze已知时,式中只有z3为未知数,故可以求出z3。
将式(3-11)整理后求根,得到z3的计算式为

【例3-5】 已知iH1=-50,z∑=1,ze=10,求各齿轮的齿数。
解 将各值代入式(3-12)得
验算传动比
以下将应用上述方法确定齿数的有关注意事项加以说明。
1)由于在最初计算齿数z4(或z3)时只取整数部分,故最后应验算实际的传动比。若用于计数机构,其传动比需要完全准确,如果计算结果发现传动比达不到设计要求,则需用试凑法计算。若用于一般的传动,只要传动比误差在允许范围内即可。
2)因为在模数一定时,齿数越多则径向尺寸越大,所以当发现齿数不合适时,可改变z∑和ze再重新计算。
3)当内齿轮齿数太少时,可能给选取插齿刀带来困难。这时也应改变z∑及ze再重新计算。
4)计算时,传动比及ze均应带着正负号代入计算式。
根据瑞士ACBAR大传动比减速器系列及日本一项测试报告而得到的相同结论,为了获得尽可能高的效率,当传动比大于28时,应当采用内齿轮输出,如图3-5所示的形式;而当传动比小于28时,应当采用外齿轮输出的形式,如图3-3所示的形式。上述传动比均是指绝对值而言。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






