【摘要】:输出轴固定,高速轴(转臂)输入,内齿轮输出,这时行星外齿轮仅作平动,不作转动,即n1=0,这种传动最适用于卷扬机构,其内齿轮与卷筒相连。关于齿数差z∑,若传动的径向尺寸有一定要求,则可根据齿轮的模数、传动比和径向尺寸来确定;若传动的径向尺寸没有限制时,z∑可由设计者自定。n1=0,内齿轮输出传动比iH2的计算如下:由式(3-2)可知,z2越大,z2-z1越小,则获得的传动比越大。
输出轴固定,高速轴(转臂)输入,内齿轮输出(见图3-2),这时行星外齿轮仅作平动,不作转动,即n1=0,这种传动最适用于卷扬机构,其内齿轮与卷筒相连。
因输出机构(简称W机构)只起连接作用,并不改变转速,故nV=n1。
当按已知传动比设计此种传动时,首先确定齿数差z∑,然后便可确定齿轮的齿数。例如,对于图3-1所示传动,z1=z∑·iHV,z2=z1+z∑。而对于图3-2所示传动,z2=z∑·iH2,z1=z2-z∑。
关于齿数差z∑,若传动的径向尺寸有一定要求,则可根据齿轮的模数、传动比和径向尺寸来确定;若传动的径向尺寸没有限制时,z∑可由设计者自定。
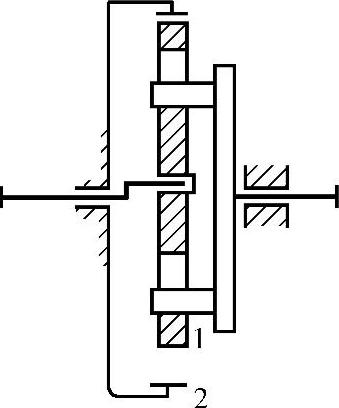
图3-1 K-H-V(N)型少齿差行星传动的传动原理
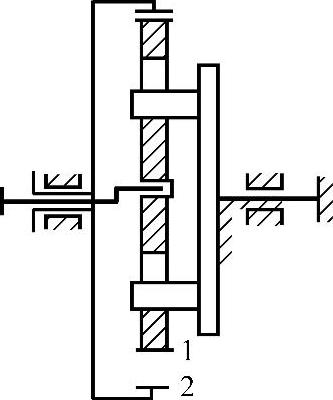
图3-2 K-H-V(N)型少齿差行星传动(内齿轮输出)(https://www.daowen.com)
【例3-1】 图3-1所示的传动,已知iHV=-50,m=2mm,内齿轮分度圆直径d2为200mm左右,求各齿轮的齿数及齿数差。
解 z∑=1时,则z1=50,z2=51,d2=102mm。
z∑=2时,则z1=100,z2=102,d2=204mm。
z∑=3时,则z1=150,z2=153,d2=306mm。因此,应取z1=100,z2=102,z∑=2。
n1=0,内齿轮输出传动比iH2的计算如下:
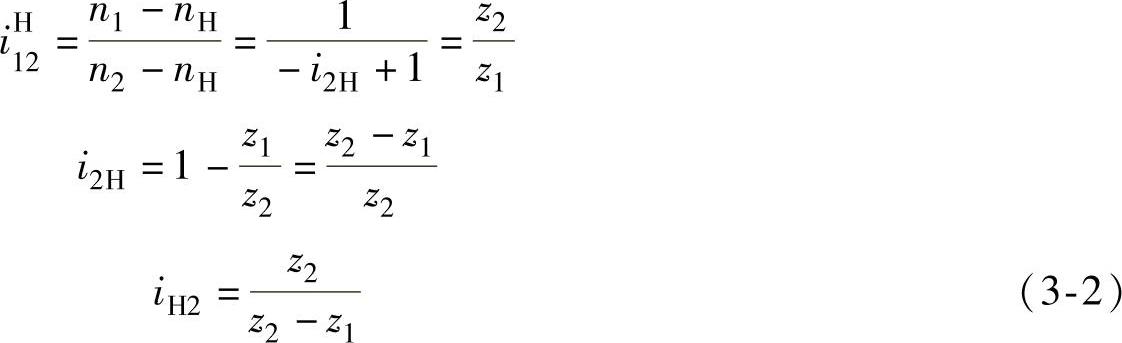
由式(3-2)可知,z2越大,z2-z1越小,则获得的传动比越大。此时,输入与输出的转向相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





