1.起作用约束与不起作用约束
如前所述,一般的约束优化问题包含有不等式约束gu(X)≥0(u=1,2,…,p)和等式约束hv(X)=0(v=1,2,…,q),在可行设计点X(k)处,若有gu(X)=0,则该约束gu(X)称为可行点X(k)的起作用约束;而若gu(X(k))>0,则该约束gu(X)称为可行点X(k)的不起作用约束。对于等式约束hv(X)=0,显然在任一可行点处的等式约束都是起作用约束。
在可行点X(k)处,起作用约束在X(k)的邻域内起限制可行域的作用,而不起作用约束在X(k)处的邻域内就不产生影响。因此应把注意力集中在起作用约束上。
2.IP型约束问题的最优解条件
图2-6所示为具有三个不等式约束的二维约束优化问题,分为以下三种情况。
1)最优点X*在可行域内(见图2-6a)。在此情况下,X*点的全部约束函数值gu(X*)>0(u=1,2,3),即这组约束条件对其最优点X*都不起作用。换言之,如果去掉全部约束,其最优点也仍是同一个X*点。因此,这种约束优化问题与无约束优化问题是等价的。
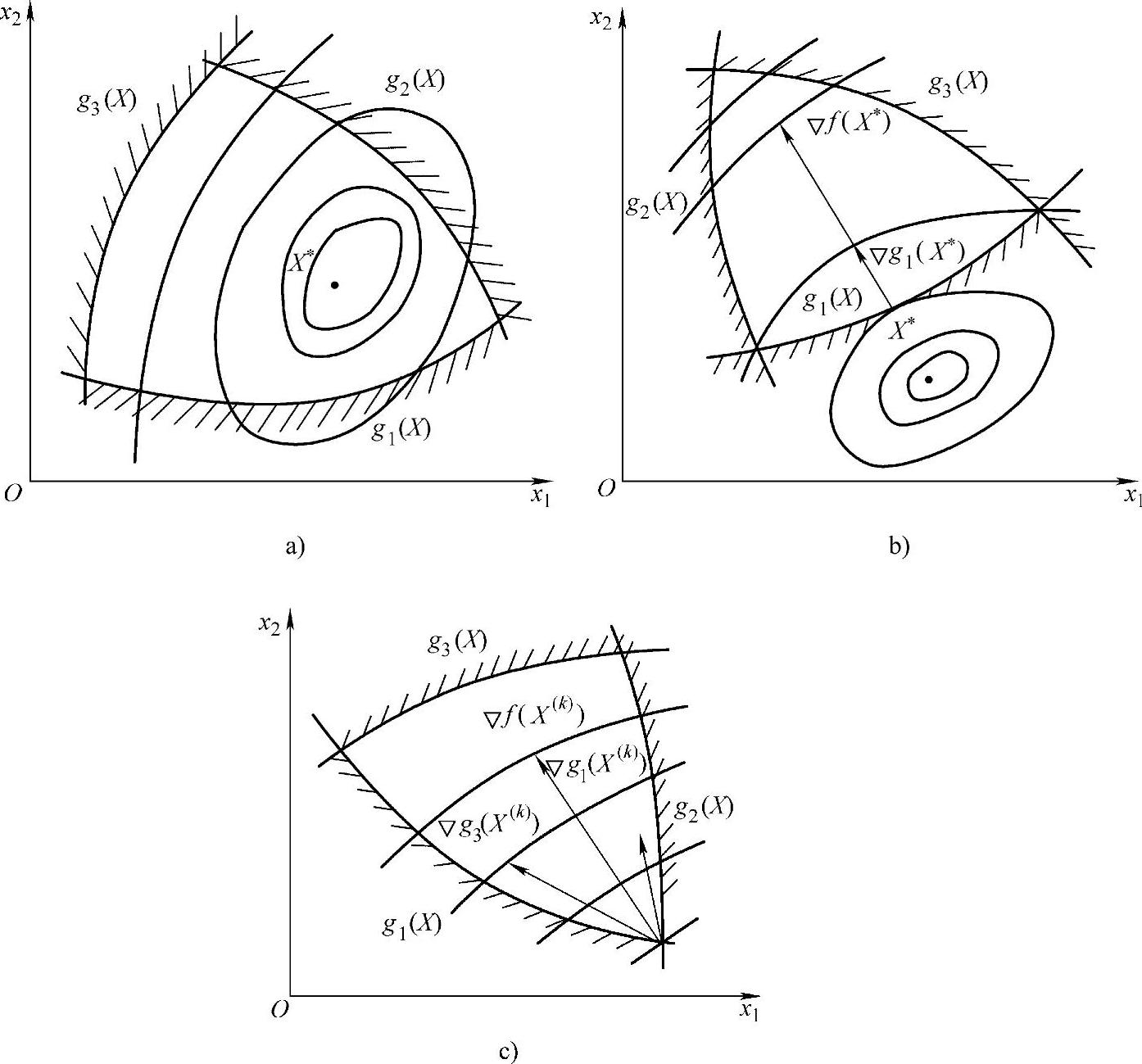
图2-6 二维不等式约束优化问题
2)约束最优点X*位于g1(X)的边界曲线与目标函数等值线的切点处(见图2-6b)。此时g1(X*)=0,g2(X*)>0,g3(X*)>0。所以,起作用的约束仅为g1(X)。既然X*是f(X)等值线与g1(X)边界线的切点,则对应的梯度矢量Δf(X*)与Δg1(X*)必共线,且方向一致。若取非负乘子λ1*≥0,则在X*处存在如下关系:

3)当前迭代点X(k)在两约束的交点上(见图2-6c)。这时,Δf(X(k))夹于Δg1(X(k))与Δg2(X(k))之间。显然,在X(k)点处,起作用约束为g1(X)和g2(X)。在这种情况下,由于X(k)点邻近的可行域内部不存在目标函数值比f(X(k))更小的设计点,因而有:X(k)=X*。由图2-6c可知,此时X(k)点的目标函数的梯度Δf(X(k))可表达为约束函数梯度Δg1(X(k))和Δg2(X(k))的线性组合。若用X*代替X(k),则有

成立,且有λ1*≥0,λ2*≥0。
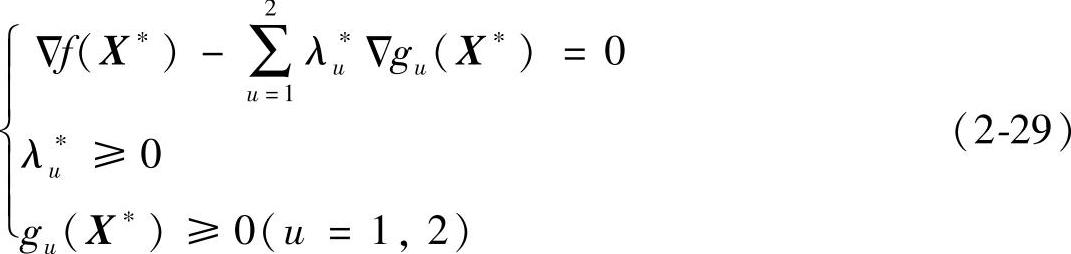
总结以上情况,对图2-6所示的二维约束优化问题,其最优解的一阶必要条件是
根据上面的分析,可归纳出IP型约束问题最优解的一阶必要条件如下:
设最优点X*位于J个约束边界的汇交处,则J个约束条件组成一个起作用的约束集,对于X*点,下式必成立:

然而,在实际求解过程中,并不能预先知道最优点X*位于哪一个或哪几个约束边界的汇交处。为此,把p个约束全部考虑进去,并取相应于不起作用约束的乘子λu*为零,这样,上式可改写成:
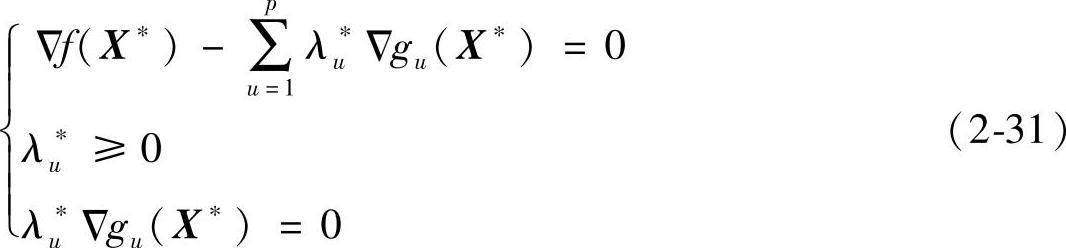
此即为IP型约束优化问题最优解一阶必要条件的一般表达式,它实际上等价于式(2-30)。这是因为,在X*处,对于起作用约束,必有gu(X*)=0(u=1,2,…,J);对于不起作用约束,尽管gu(X*)>0,但λu=0。
3.EP型约束问题的最优解条件
图2-7所示为具有一个等式约束条件的二维优化问题,其数学模型为
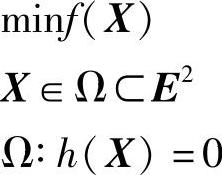
该问题中,等式约束曲线h(X)=0是它的可行域,而且目标函数等值线f(X)=C与h(X)=0的切点X*是该约束问题的最优点。在X*点处,目标函数的梯度Δf(X)与约束函数的梯度Δh(X*)共线。因此,必定存在一个乘子μ*,使得Δf(X*)-μ*Δh(X*)=0成立。对于一般的n维等式约束优化问题:
其最优解的一阶必要条件为

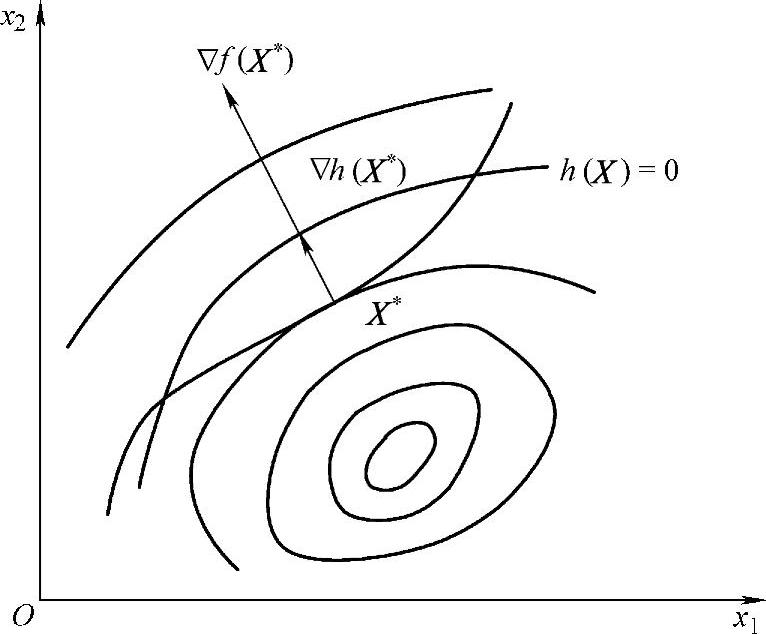
图2-7 二维等式约束优化问题
4.GP型约束问题的最优解条件
由上述IP型和EP型约束问题的最优解条件,可推出一般约束优化问题的一阶必要条件。设n维一般约束优化问题的数学模型为

则X*为其最优解的一阶必要条件应为

若令 
则称L(X,λ,μ)为关于问题(2-32)的广义拉格朗日(Lagrange)函数,式中,
 是拉格朗日乘子。(www.daowen.com)
是拉格朗日乘子。(www.daowen.com)
于是,式(2-33)中第一式可写成:

5.库恩-塔克(Kuhn-Tucker)条件
在实际优化计算中,常常需要判断某可行迭代点X(k)是否可作为约束最优点X*输出而结束迭代,或者检验所输出的可行结果是否已满足约束最优解的必要条件。这种判断或检查通常是借助于库恩-塔克条件(简称K-T条件)进行的。
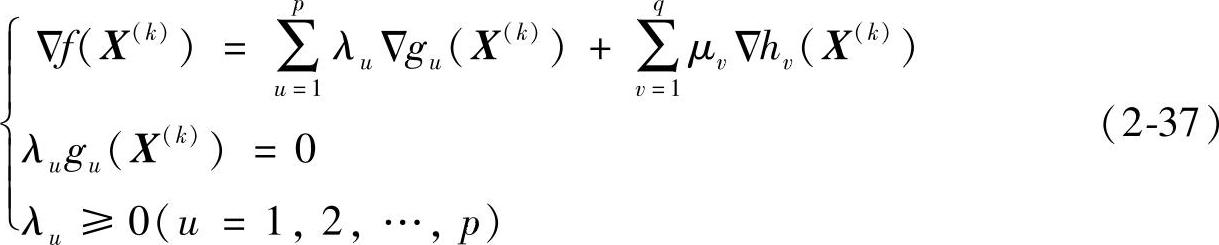
K-T条件指出,点X(k)要成为约束优化问题最优解的必要条件是:目标函数f(X)的负梯度-Δf(X(k))可以表示为起作用约束函数梯度Δgu(X(k))和Δhv(X(k))的线性组合。即

式中其他符号的意义同前。当不等式约束gu(X(k))≥0时,上式可写成:
若引入广义拉格朗日函数及如下的向量:
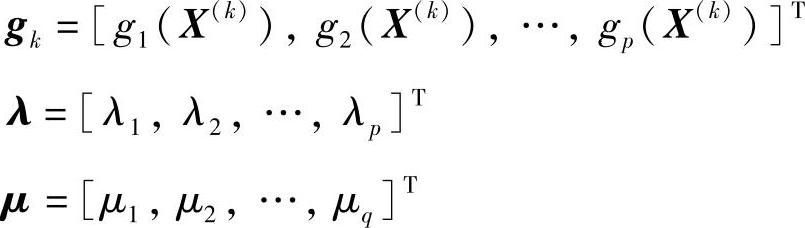
则式(2-37)可写成更紧凑形式:
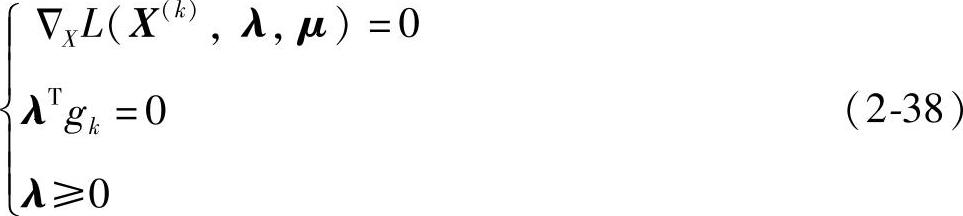
凡满足式(2-36)、(2-37)或(2-38)的迭代点 即可以作为最优点输出。这时,
即可以作为最优点输出。这时, 称为K-T点。
称为K-T点。
【例2-5】 设二维约束优化问题的数学模型为
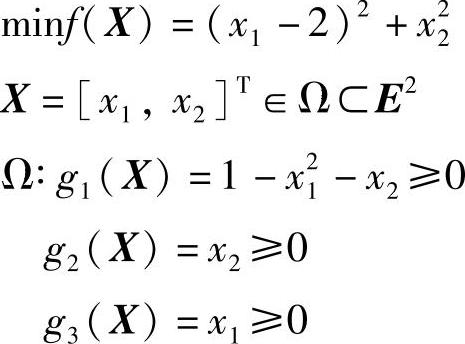
它的当前迭代点为 ,试用K-T条件判断其是否为约束最优点。
,试用K-T条件判断其是否为约束最优点。
解(1)计算X(k)点的诸约束函数值
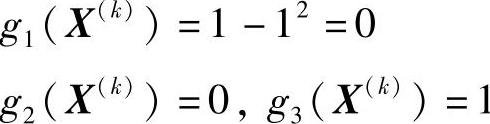
可知X(k)点是可行点。
(2)X(k)点起作用的约束
g1(X)=1-x21-x2=0
g2(X)=x2
(3)求X(k)点的诸梯度
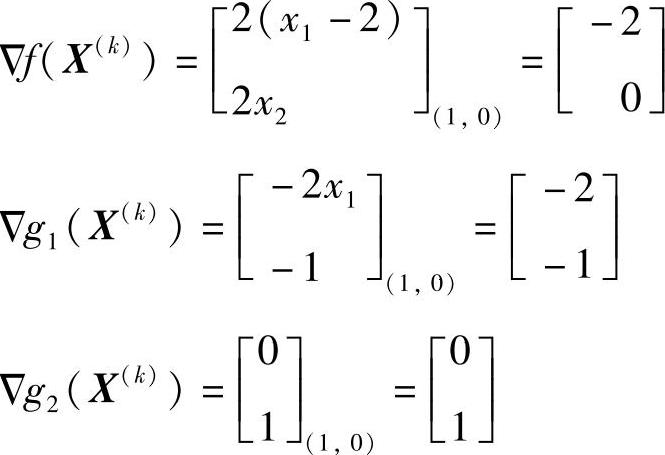
(4)求拉格朗日乘子 把以上计算结果代入式(2-37),可得
写成线性方程组
-2+2λ1=0
λ1-λ2=0
解得:λ1=λ2=1>0,满足K-T条件。所以, 为约束局部最优点。而且,容易验证,f(X)是凸函数,可行域为凸集,故
为约束局部最优点。而且,容易验证,f(X)是凸函数,可行域为凸集,故 也是该问题的全局最优解,如图2-8所示。
也是该问题的全局最优解,如图2-8所示。
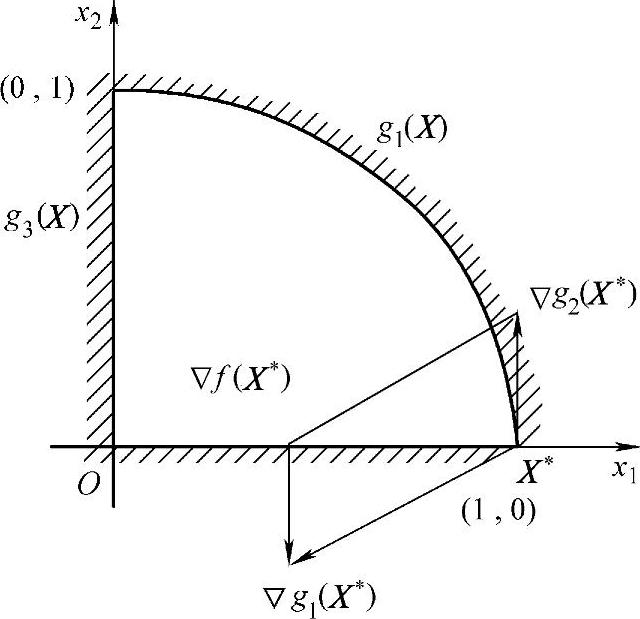
图2-8 例2-5约束优化问题图解
6.K-T条件的几何意义
K-T条件的几何意义如图2-9所示,起作用约束函数的梯度向量,在设计空间内构成一个锥体。若满足K-T条件,则目标函数的负梯度向量-Δf(X)应包含在此锥体之内。显然,图2-9a表示X并非目标函数的最优点,因为它不满足K-T条件;而图2-9b所示的X才是目标函数的一个局部最优点。
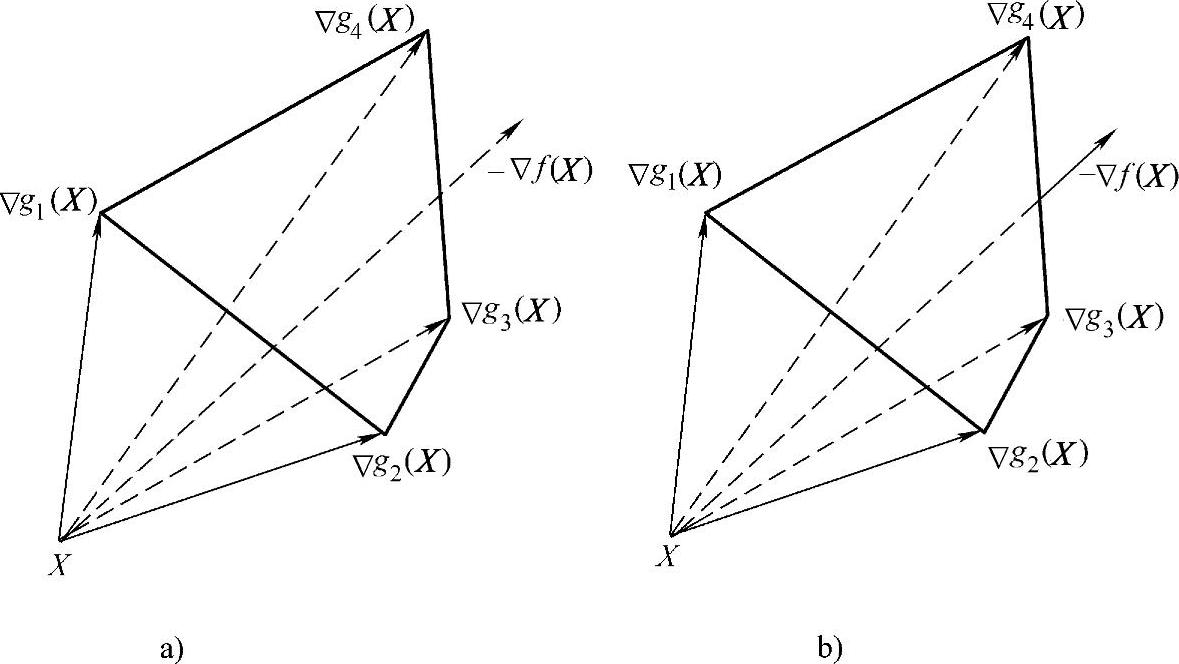
图2-9 K-T条件的几何解析
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





