1.迭代过程
由前述知,无论是无约束优化问题还是约束优化问题,其实质均为求极值的数学问题。其寻优方法迥异于高等数学中的求极值方法,主要特点是:按照一定的逻辑结构进行反复的数值计算,寻求函数值不断下降的设计点,直到最后获得足够精度的近似解为止。此即为数值迭代法。
图1-7所示为一二维问题的迭代过程。从一选定的初始点X(0)出发,沿某种优化方法所规定的方向,确定适当的步长,按下式产生新的设计点:
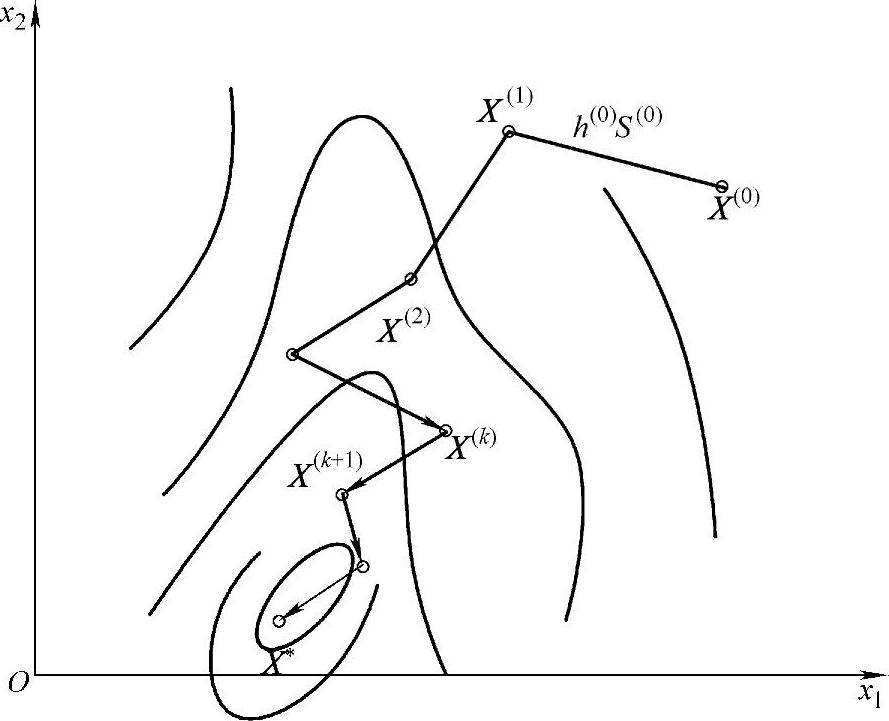
图1-7 二维问题的迭代过程

使满足

则X(1)就是一个优于X(0)的设计点。然后,以X(1)为新起点按类似公式产生下一个新设计点:

此即为优化计算所采用的基本迭代公式。应用上式,点列
 都可通过同样的运算步骤作重复计算而获得,因而容易在计算机上实现。由于每一次迭代取得的新迭代点的目标函数值都有所下降,迭代点不断向最优点靠拢,因而最后必将达到十分逼近理论最优点的近似最优点X*。
都可通过同样的运算步骤作重复计算而获得,因而容易在计算机上实现。由于每一次迭代取得的新迭代点的目标函数值都有所下降,迭代点不断向最优点靠拢,因而最后必将达到十分逼近理论最优点的近似最优点X*。
2.迭代计算的终止准则
上述迭代过程不可能无休止地进行下去,那么何时截断这种迭代呢?这就存在一个迭代终止的准则问题。
从理论上说,设计者当然希望最终迭代点到达理论极小点,或者使最终迭代点与理论极小点之间的差距足够小时才终止迭代。但是,这在实际中是难以实现的。因为对于一个待解决的机械最优化设计问题,其理论极小点在哪里往往并不清楚,所知道的仅仅是通过迭代计算获得的迭代点序列X(1),X(2),…,X(k),X(k+1)。因此,只能从点列所提供的信息及设计要求来判断是否应该终止迭代过程。(www.daowen.com)
对于无约束优化问题,常用的迭代终止准则有以下几种:
(1)点距准则 相邻两迭代点X(k)与X(k+1)之间的距离应小于或等于给定的允许误差ε(ε>0),即

或写成:
(2)函数下降量准则 当 时,用函数绝对下降量准则,即相邻两迭代点的函数值之差小于或等于给定的允许误差ε(ε>0):
时,用函数绝对下降量准则,即相邻两迭代点的函数值之差小于或等于给定的允许误差ε(ε>0):

当|f(X(k+1)|<1时,可用函数相对下降量准则:

(3)梯度准则 目标函数在迭代点的梯度的模应小于或等于给定的允许误差,ε(ε<0),即

必须指出的是,这一准则仅适用于目标函数于定义域上为凸函数。若是非凸函数,则有可能导致误把驻点作为最优点。关于函数的梯度、凸与非凸函数、驻点等概念将在第2章中详细论述。
对于约束优化问题,不同的优化方法有各自的终止准则(收敛条件),这将在第5章中逐一介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





