依据摄影测量理论的结构光三维测量法,有效地利用可控光源和图像处理相关的测量技术,可以在一些特殊情况下改善三维坐标测量精度。例如对于一些表面较光滑、形状变化较大、缺乏纹理、灰度不明显的表面区域,可以在物体表面上形成明显的结构光条纹,很容易在信息贫乏区域找到相应的匹配点[142]。结构光源加单相机的立体测量系统在三维重构方面应用较为普遍,本文介绍的自动测量系统,也是利用这种典型的硬件结构来实现磨削的大型自由曲面的三维重构。
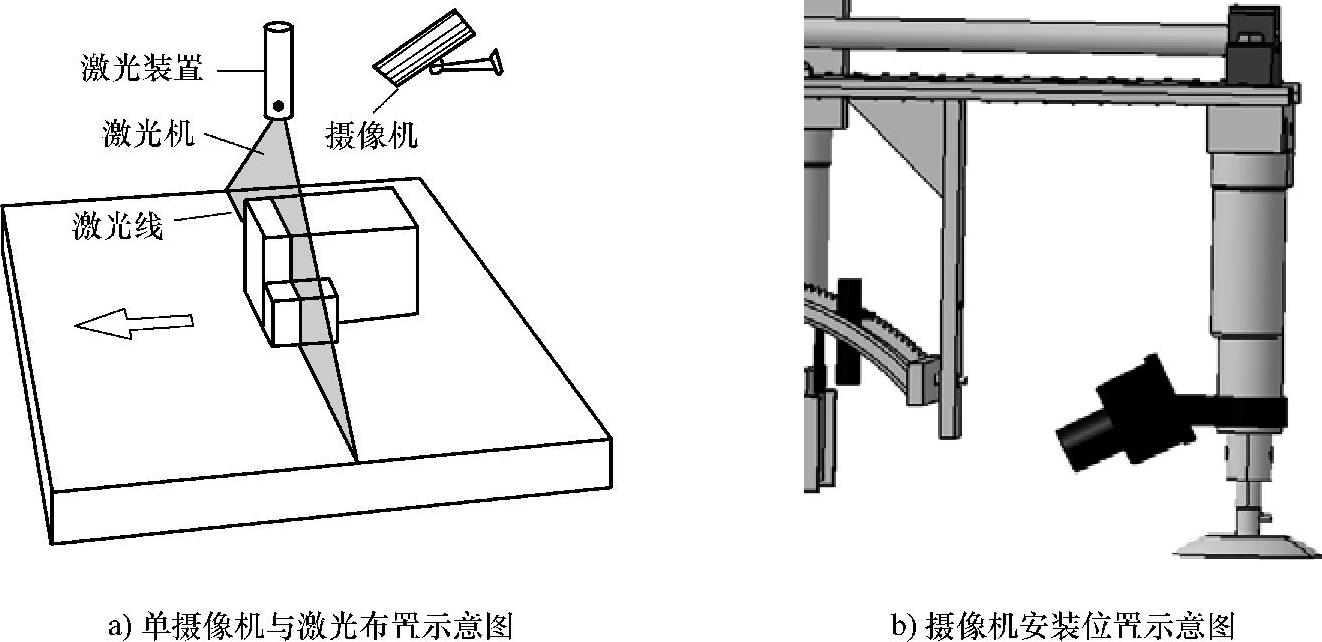
图2-6 曲面重构系统的组成原理图(https://www.daowen.com)
曲面重构系统的组成原理如图2-6所示,在该系统中,传统接触式坐标测量机的接触式测头被单摄像机和线结构光替代了。将线激光器固定到机器人坐标系的z轴方向上,其光轴与z轴方向平行,图像平面的坐标x轴和y轴分别平行于机器人坐标系的x轴和y轴。在机器人对待加工表面的曲面进行三维重构时,首先机器人进入待研磨区域,然后机器人沿x轴方向做水平运动,同时打开线激光器和摄像机开始进行图像采集,得一系列图像,当机器人运动到x轴的极限位置后,关掉线激光器和摄像机,机器人回到原位,同时曲面重构系统对已扫描的曲面进行三维重构。如果利用这些图像序列重构一个三维图像,首先需要利用调焦评价函数在这些图像序列中找到图像上每一个像素的正焦点,根据这些正焦点获得自由曲面的正焦图像,再利用物像关系式得到当前视场的自由曲面上点的三维坐标值。5-TTRRT机器人带动摄像机和线激光器在被测工件表面循环扫描、计算,最终得到全部自由曲面上点的三维坐标。
研磨机器人自由曲面三维重构的硬件系统构成:图像采集为北京大恒DH-HV1302UM的分辨率为1280×1024的摄像机,激光器为M635AL5-24一字线激光器。在图像采集系统的安装过程中,确保相机镜头与z轴的夹角能够清晰地获得每帧图像上完整的激光线,并且尽量保证摄像机与z轴的夹角足够大,使得曲面在z轴方向较小的高度变化就可以获得激光线在图像上较大范围的变化。同样的高度,激光线变化范围越大,所获取的曲面模型的精度越高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





