根据研磨的工作特性与要求,在研磨过程中,无论是采用手工研磨还是机器研磨,都要求研磨工具以一定的姿态作用于被加工的表面上,并沿着研磨轨迹对表面进行加工,即研磨工具与待加工表面存在一定的相对位置关系,在这一过程中,操作者通常通过改变法向研磨力F、研磨工具的线速度v、进给速度f及姿态角β等工艺参数来获得理想的研磨效果。由于研磨工具与自由曲面之间的接触为三维接触,为了保证研磨作用力沿着自由曲面上的法线方向施加,避免研磨工具与自由曲面之间发生干涉,工作过程中研磨工具的姿态要根据需要发生相应的改变。研磨接触区域的形状和尺寸以及研磨接触作用力也随着研磨工具姿态和自由曲面表面曲率的变化而变化。根据常用的研磨工具形状可知,直线、圆弧、螺旋线等简单曲线及其组合构成了研磨工具的工作部分。常用的工具刃及其组合形式可分为:平底工具,柱形工具,锥形工具,鼓形工具,球面工具,圆环面工具,反圆环面工具等。根据研磨工具包络截型的曲率分布,还可分为不可变的、可变的、可大幅度改变的等几种类型的工具。自由曲面的曲率变化相差很大,在对曲面进行加工时,工具包络截型的曲率分布情况及其变化幅度是影响加工的主要因素。
本文介绍的5-TTRRT研磨机器人主要针对的是采用球头研磨工具进行加工的情况。因此,通过研磨工具的工具轴矢量与工件被加工表面的法线方向要保持一定的姿态角,并保证研磨作用力沿着自由曲面上的法线方向施加。此外,研磨工具的运动方向与被加工曲面上不同曲率的对应点切向方向一致也是需要保证的。
研磨机器人的操作臂由三个关节组成,绕y轴方向的转动关节Ⅰ安装在与y轴方向固联的框架上。实现绕x轴方向转动的摆动关节Ⅱ,通过齿轮齿条机构安装在转动关节Ⅰ上。实现直线运动的关节Ⅲ,与摆动关节Ⅱ固联。
转动关节Ⅰ由步进电动机驱动绕y轴方向转动,转动范围为-30°~30°。
摆动关节Ⅱ由步进电动机驱动齿轮齿条机构工作。工作时,齿轮沿着弧形齿条运动进而带动关节Ⅱ工作,运动的中心平行于x轴方向,运动范围为-30°~30°。(https://www.daowen.com)
直线运动关节Ⅲ的滚珠丝杠部分与摆动关节Ⅱ固联,通过滚珠丝杠机构的螺母带动研磨工具头进行工作。
5-TTRRT机器人机械实物如图2-2所示。
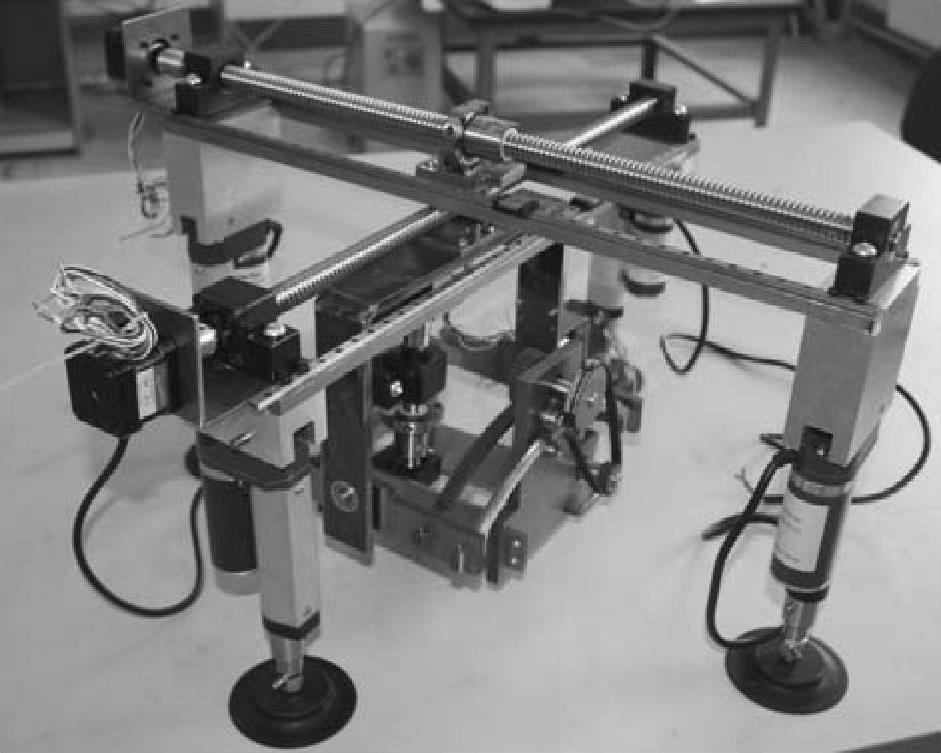
图2-2 自主移动研磨机器人机械实物
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



