【摘要】:通过插补算法控制步进电动机分别实现x轴或y轴的直线运动方式,以控制移动平台到达工作位置。为实现移动平台在任何位置都能可靠工作,采用了带有四个可伸缩足腿的方案,在x轴与y轴的滚珠丝杠两端分别安置了两个可伸缩的电动推杆,电动推杆伸出的最大行程为50mm。在电动推杆的工作端安装了真空吸盘,为了保证移动平台平行于水平面,采用倾斜计反馈校正的机器人平台姿态补偿策略。
我们研制的5-TTRRT机器人移动与转向机构是由一个直角坐标机构来实现的,该机构由两个相互垂直的直线运动轴组成,整体的框架结构采用的是滚珠丝杠配合滑动导轨的形式,两个运动轴对应直角坐标系中的x轴和y轴,实现在水平面内的运动。由步进电动机分别驱动x轴或y轴的滚珠丝杠副工作,实现沿着x轴或y轴的运动。通过插补算法控制步进电动机分别实现x轴或y轴的直线运动方式,以控制移动平台到达工作位置。
为实现移动平台在任何位置都能可靠工作,采用了带有四个可伸缩足腿的方案,在x轴与y轴的滚珠丝杠两端分别安置了两个可伸缩的电动推杆,电动推杆伸出的最大行程为50mm。在电动推杆的工作端安装了真空吸盘,为了保证移动平台平行于水平面,采用倾斜计反馈校正的机器人平台姿态补偿策略。利用装在机器人本体上的姿态传感器—倾斜计,可以实时地测出机器人x-y平面与铅垂线之间的夹角,通过该夹角,可以求出移动平台姿态变化的程度。将倾斜计输出的电压信号通过运动控制卡上A/D口转换成数字量,最后送入计算机以实现机器人本体的姿态控制。
 (https://www.daowen.com)
(https://www.daowen.com)
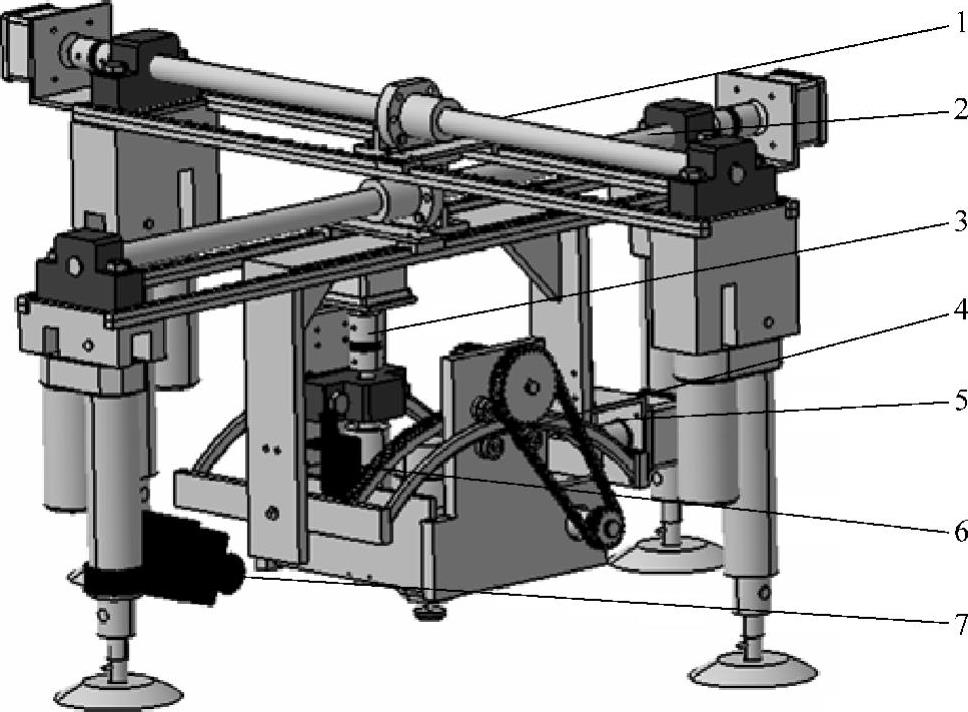
图2-1 自主移动研磨机器人的结构图
1—x向进给机构 2—y向进给机构 3—z向进给机构 4—摆动机构 5—转动机构 6—激光装置 7—摄像机
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






