从20世纪60年代开始,国外就开展了关于移动机器人的研究,移动机器人涉及多个学科门类的知识。
按照移动方式分类,可以分为轮式、履带式、腿式(单腿、双腿及多腿式)和水下推进式等多种结构,其中轮式结构具有易控制、对稳定性问题影响小、单位移动距离消耗能量小的特性,且可以比其他形式的结构移动得更快。此外,轮式结构的机器人的重心一般在车轮连线在地面投影形成的多边形内,通过适当的车轮配置可以保持机器人稳定而灵活地旋转、平移,因此轮式结构在移动机器人中得到了广泛的应用[33]。
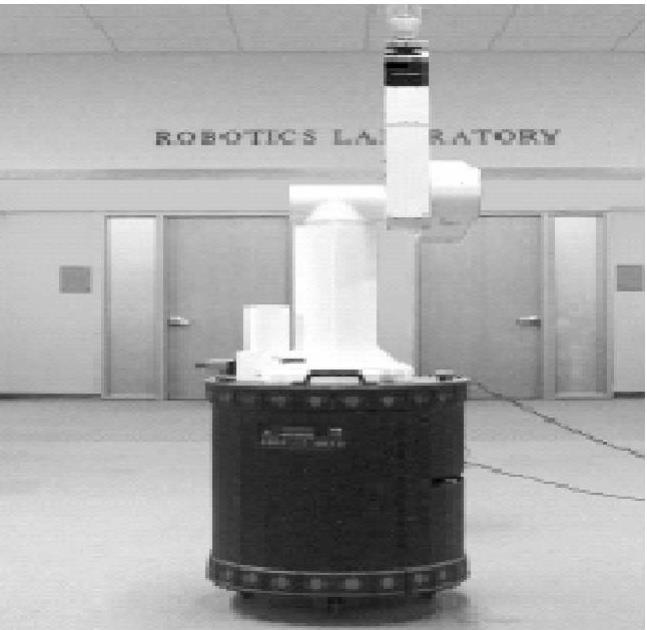
图1-53 Rover轮全方位移动机器人
图1-5所示3 Rover轮全方位移动操作机器人(Stanford Robot)[34],由斯坦福大学的Oussama K研制。
日本东部大学的Yasuhisa H和Wang Z D研制的具有4个Mecanum轮的全方位移动操作机器人[35],如图1-6所示。
另外,在壁面环境下工作的爬壁机器人(Wall-Climbing Robot,WCR),WCR的运动机构主要有足式、框架式、履带式及轮式等。
图1-7所示电磁吸附足式WCR,由Guo Lin等人设计[36]。行走机构的两只脚带有三个电磁吸盘并成交叉三角形结构,可在壁面实现交替抬起、平移和旋转运动。
Chen I.M.等人[37]设计了图1-8所示四只脚结构的Planar Walker,机器人的直线行走和转弯功能通过每两只脚之间的气缸伸缩运动带动实现,机器人的固定由每只脚上的吸盘保证。
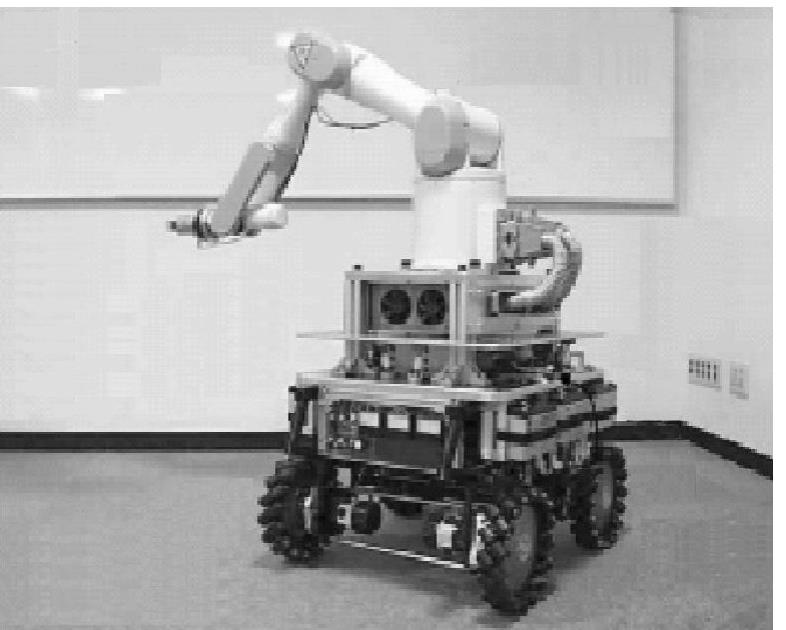
图1-64 Mecanum轮全方位移动操作机器人
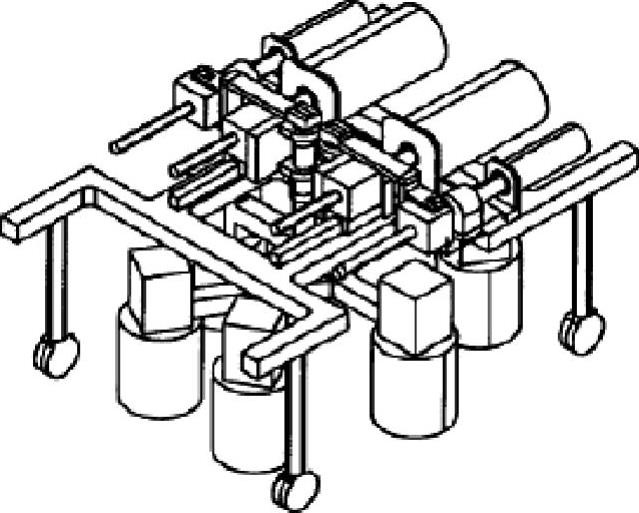
图1-7 Guo Lin设计的WCR
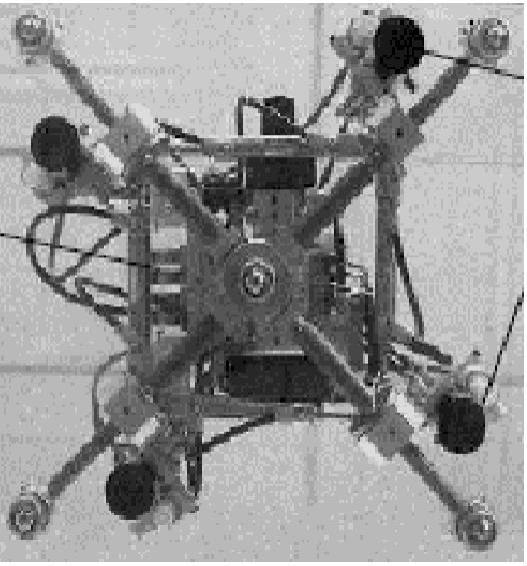
图1-8 Planar Walker
国内在研制移动机器人方面也取得了许多成果,例如:图1-9中所示的具有自主知识产权的“灵蜥—B”型排爆机器人,是由中国科学院沈阳自动化研究所自行研制的[38]。(www.daowen.com)

图1-9 中国“灵蜥—B”型排爆机器人
哈尔滨工业大学在全方位移动机器人方面进行了大量的研究,在参考文献[39]中给出了一种自行研制的移动式作业型智能服务机器人,在该机器人研究项目中主要研究了全方位移动机构、七自由度机器人作业手臂及多传感器信息融合的机器人路径规划等问题。在此基础上,研制出采用Mecanum轮的全方位移动服务机器人。
图1-10所示的具有抗倾覆机构和纠偏机构的永磁吸附双履带式WCR[40],能够用于锅炉水冷壁清扫、检测,通过每条履带上安装的永磁铁来实现在壁面上的吸附。
图1-11所示的永磁吸附式WCR[40],依靠稀土永磁吸盘作为壁面吸附机构实现对油罐容积检测。

图1-10 锅炉水冷壁清扫WCR

图1-11 上海交大永磁吸附式WCR
图1-12与图1-13是两种由北航研制的玻璃幕墙清洗机器人[40],其中Cleanbot-I型由本体、保险与随动系统以及地面支援系统组成。由纵、横呈十字交叉的两组气缸组成的本体,可沿纵横方向自由运动和越障。

图1-12 Cleanbot-I

图1-13 清洗拱形外墙机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






