在实际电路中,即使并联逆变器的基准信号完全一致,由于电路结构参数的不一致、温漂等因素,输出电压的幅值、相位仍会存有偏差而导致并联环流,采取相应环流抑制措施是必要的。抑制环流的最直接简易的方法是在各逆变器输出端串接一限流电感,但由于限流电感将产生静态压降,增大了逆变器输出阻抗,使逆变器电压输出特性变软,稳态电压精度变差。
考察图7-21所示双逆变器并联系统在未加入均流控制时的控制框图,Gref1、Gref2是正弦波发生器的传递函数,Gct1、Gct2是逆变器闭环传递函数,Gu和Gi分别是输出电压和环流的综合传输比;Uref1、Uref2是逆变器参考电压幅值。
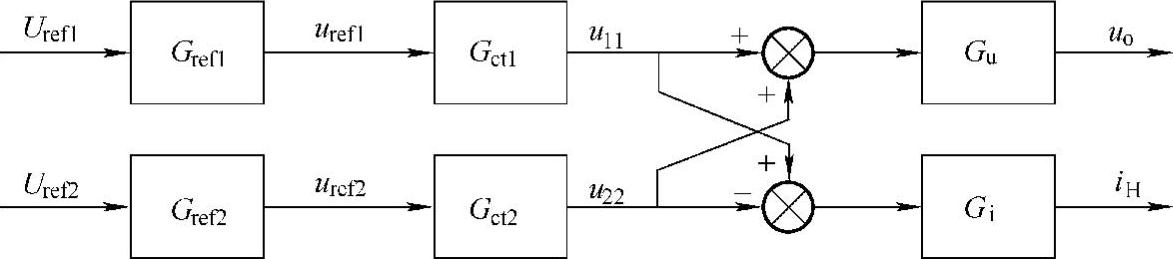
图7-21 无均流控制并联逆变器控制框图
为简化分析,基于已采用同步跟踪技术获得参考电压的准确同步,即认为不存在参考电压和输出电压在相位上的偏差,只存在幅值偏差;同时基于7.1.2关于影响环流
主要因素的分析结论,将导致输出电压幅值偏差的电路结构参数差异或控制参数差异等因素都等效成参考电压幅值的差异,则有: ,
, 。这样,可推得并联系统输出电压和环流为
。这样,可推得并联系统输出电压和环流为

为抑制并联环流,设计引入均流控制环(见图7-22),利用环流幅值来修正参考电压的幅值。与逆变器原有电压电流闭环相比,均流控制环并非是实时控制环,从相频特性上等效于在系统中加入了一个时滞环节,用GS1=GS2=GS来表示,数字化控制时该函数与并联逆变器通信的速度有关;GH1=GH2=GH是均流控制器的传递函数。
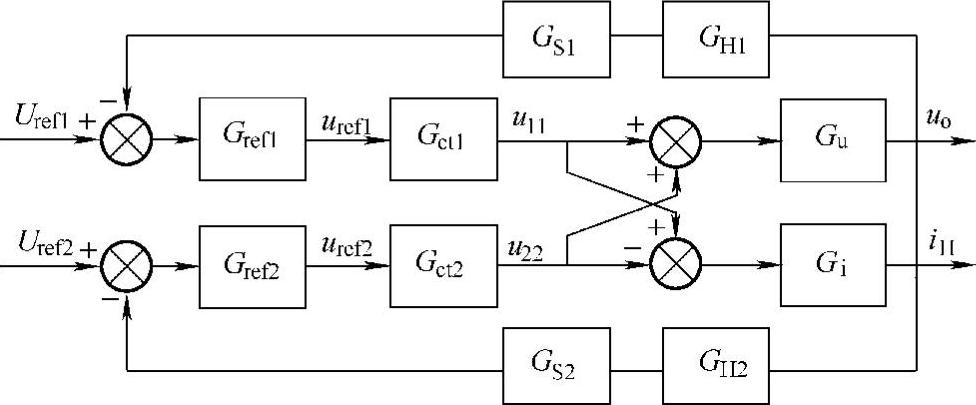
图7-22 含均流控制的并联逆变器控制框图
引入环流控制之后并联系统输出电压和环流变为

对比式(7-17)和式(7-18)可得

显见 ,而均流控制环的引入并没有改变并联系统输出电压特性。(https://www.daowen.com)
,而均流控制环的引入并没有改变并联系统输出电压特性。(https://www.daowen.com)
含并联环流控制的逆变器单元控制结构框图如图7-23所示,图中除逆变器原有电压电流双闭环外,多了一个环流反馈控制环。
在每个正弦输出周期,每个并联逆变器将自身电流采样信号通过均流母线送至其他并联单元,同时从均流母线获取其他并联单元的电流信号,按式(7-20)计算电流偏差量Δi,经低通滤波器取其半个工频周期的平均值 再按式(7-21)计算出参考电压补偿量,用以调整参考电压的幅值。
再按式(7-21)计算出参考电压补偿量,用以调整参考电压的幅值。

式中,iav为所有并联单元输出电流的平均值,Kc为补偿系数。
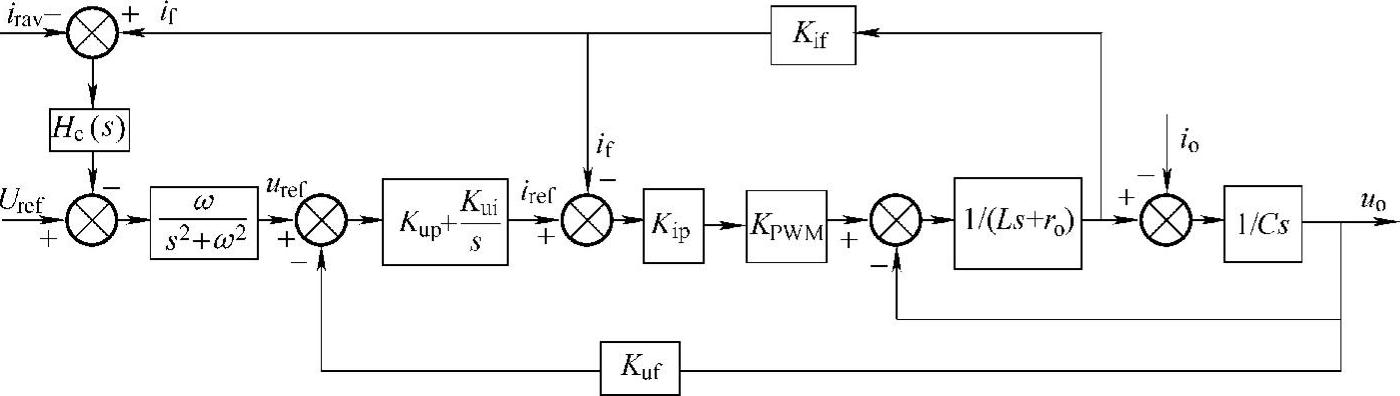
图7-23 含环流抑制的并联逆变器单元控制结构框图
对采用该并联均流策略的两台逆变器并联系统进行仿真验证,仿真主要参数同7.1.2节。图7-24为与图7-6同等条件下(相同的参考电压幅值差设定),引入环流控制后得到的仿真结果,图7-25是并联系统在负载突变条件下的动态响应仿真结果,其中图7-25a为系统输出电压,图7-25b是逆变器单元各自输出电流和环流情况。
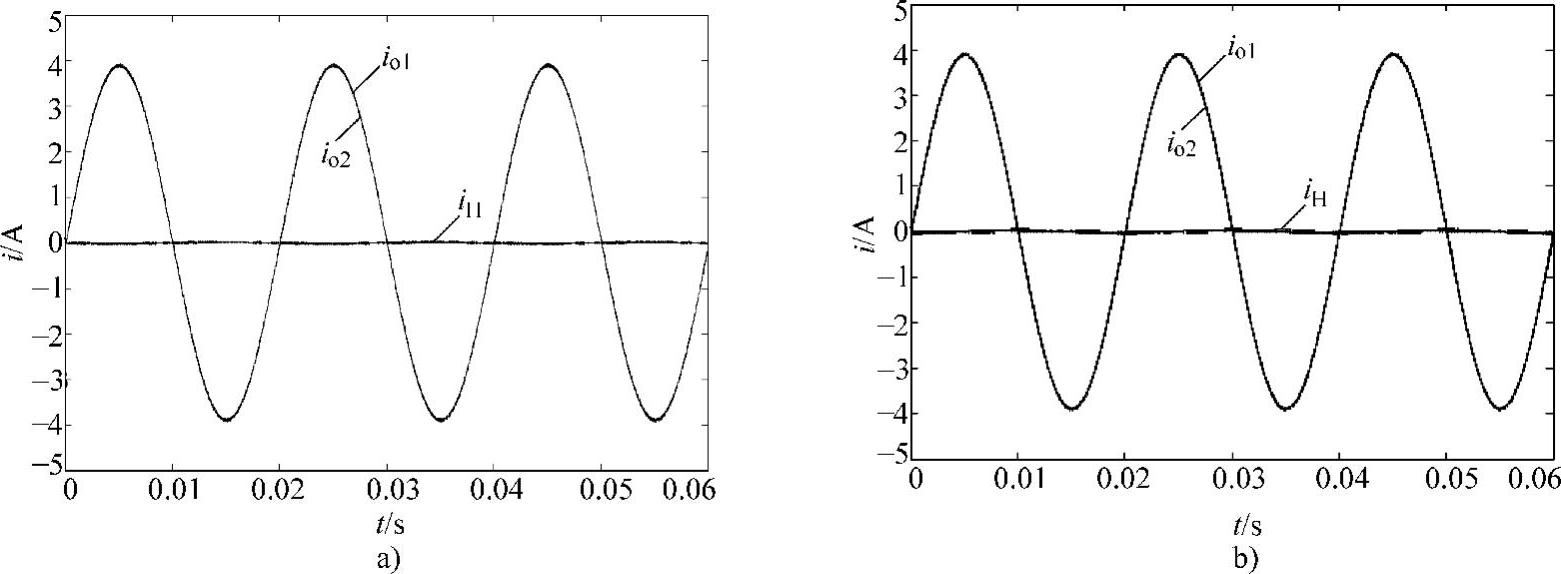
图7-24 加入均流控制后逆变器输出电流及环流仿真结果
a)Uref1=3.1V、Uref2=3.101V b)Uref1=3.1V、Uref2=3.105V
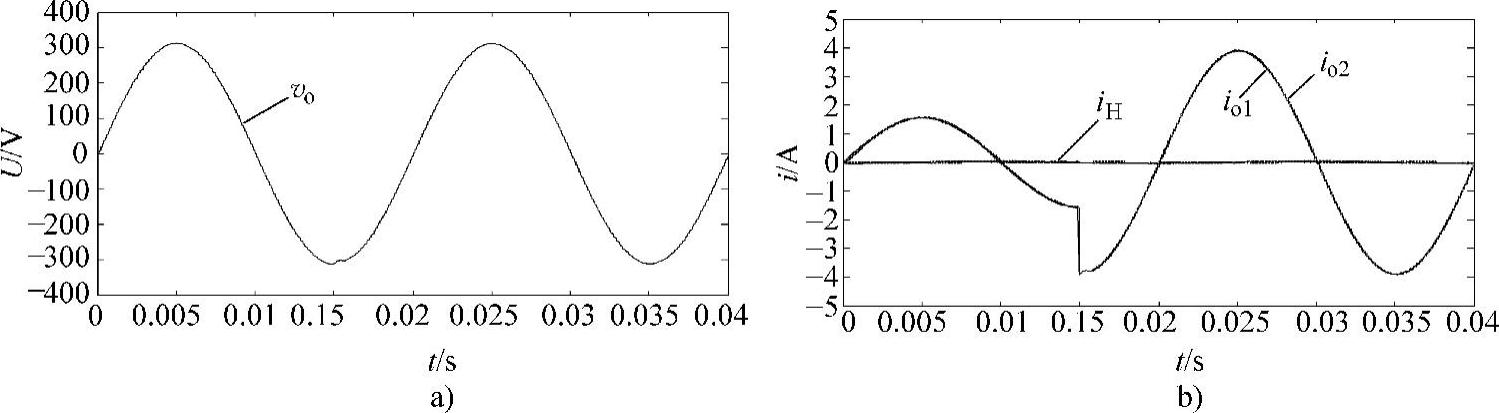
图7-25 并联系统在负载突变条件下的动态响应仿真结果
a)并联系统输出电压 b)并联逆变器单元输出电流和环流
虽然仿真只是针对参考电压存在差异的情况,但是由于其他电路结构参数或控制参数的差异所导致的输出电压偏差都可被等效成因参考电压存在差异而产生,只要实现良好的同步跟踪技术,可以通过实时调整参考电压的幅值获得较好的并联控制效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






