这类方法属于电流跟踪型控制,采用电流闭环来控制逆变器模块的输出电流跟踪同一指令电流(Current-Programming)变化,以实现负载均分控制。电流指令(即参考信号)的形成是这一类均流方法的核心,不同的电流指令形成了各有特色的均流控制方案。从大的方面讲,可分为平均值均流、峰值均流两类,而峰值均流主要就是主从控制法。按主模块的产生方法,主从控制又分3种方案:主从设置法(Dedicated Mas- ter,DM)、轮主均流法(Rotating Master,RM)、自主(或称“民主”)均流法(Auto- matic Master,AM)。
根据生成电流指令irefi的基本原理,将电流跟踪指令环节统一简化为图7-13所示框图,P1(s),…,Pn(s)是各逆变器模块调节器传递函数,模块经μ1,…,μn连接到公共均流母线,加权函数W1(s),…,Wn(s)满足W1(s)+…+Wn(s)=1,其输出即为与期望均流率成比例的参考电流指令irefi,irefi与实际输出电流ioi之差得到电流误差信号iei,经调节器Pi(s)得到Usei用于调节输出电压、实现均流控制。
以图7-13为基础,对μ1,…,μn和W1(s),…,Wn(s)的不同设置或处理,可得出以下几种典型的电流跟踪控制均流方案。
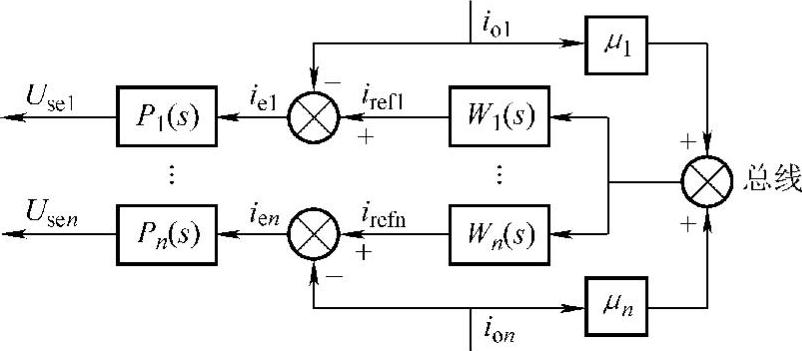
图7-13 电流跟踪指令环节
1.平均值均流控制
令图7-13中μ1,…,μn都等于1、加权函数Wi(s)是与各模块容量成比例的增益。特殊地,当相同容量的模块并联时,W1(s)=…=Wn(s)=1/n,此时各模块得到的电流跟踪指令是它们实际输出电流的平均值。平均值均流控制的实现原理如图7-14所示。
平均值均流法的优点:单一均分母线连接,相对稳定和精确的均流,均分控制抗噪能力好。不足:可靠性和容错能力差,可能出现特殊的应用问题,如当一个电源模块的电流上升到其极限值,或接在母线上的任一模块不工作,都会造成均流母线过载、输出电压向下调,甚至达到下限。
2.瞬时值均流控制
这是一类基于主从控制思想的电流跟踪均流控制方法(Master-Slaves Current-Programming)主要有以下几种:
(1)主从设置法:将图7-13中μ1,…,μn的一个设计为1、其余为0,而且所有Wi(s)=1。即一个模块被设置成主模块,其余模块(从模块)的电流环均以主模块输出电流作为参考。台湾学者Jiann-Fuh Chen提出图7-15所示电压源/受控电流源型并联方案,即为典型的主从设置法应用。
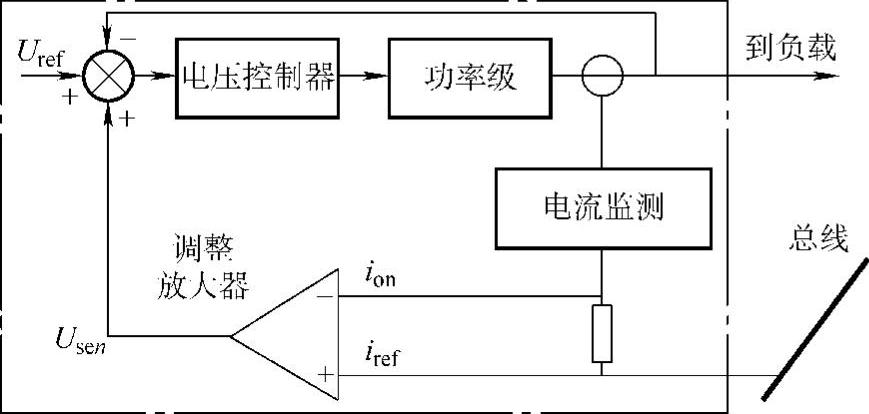
图7-14 平均值均流控制法
主模块(master)是1个电压控制PWM逆变器(Voltage-Controlled Inverter,VCPI),它通过锁相环PLL保证系统输出频率与自身频率基准或市电频率同步,并通过反馈环节使输出电压稳定。
从模块(slave)是N个电流控制PWM逆变器(Current-Controlled Inverter,CC-PI),通常设计成电流跟随器性质,控制模块输出电流跟踪功率分配中心分配来的参考电流,实现负载均分。CCPI内部可设置电流前馈来加快电流响应。
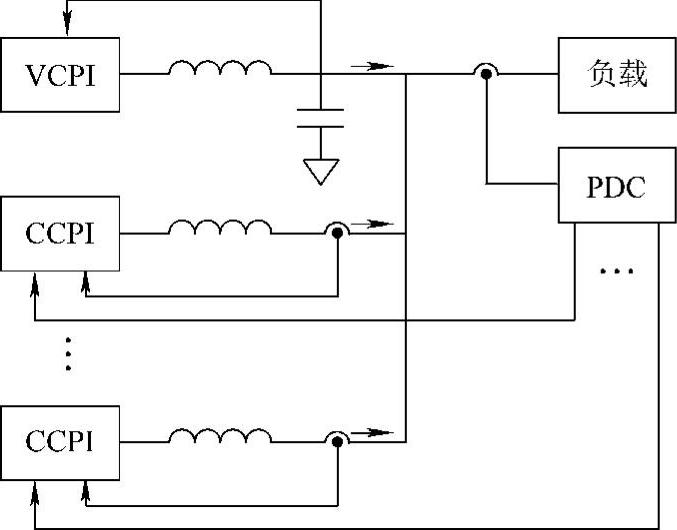
图7-15 电压源/受控电流源型并联方案
功率分配中心(Power Distribution Cen-ter,PDC)负责提供给每个CCPI模块电流参考信号。PDC检测负载电流IO,根据CCPI单元数计算电流指令,并将电流指令同步分配给各CCPI单元。因为参考电流跟随负载电流,因此CCPI模块的输出电流按输出电压频率跟随负载电流。通常将PDC功能融于VCPI内部,以减少模块外部连线。(https://www.daowen.com)
图7-16为采用主从设置法的电压电流双闭环控制逆变器并联系统原理框图,由主模块电压外环控制并联系统的输出电压,主模块电压调节器的输出信号作为各并联模块的电流内环的参考给定,只要各模块电流内环参数一致性好,就可以实现各并联模块输出滤波电感电流的同频、同相、同幅值。
主从设置法并联控制的思路简单明了,易于实现,能实现较好的负载均流;VCPI和CCPI模块均有独立的控制环,容量扩展灵活,而且系统稳定性好。但是系统可靠性低,没有完全实现冗余(VCPI和PDC没有冗余单元),一旦主模块失效,整个系统无法工作。
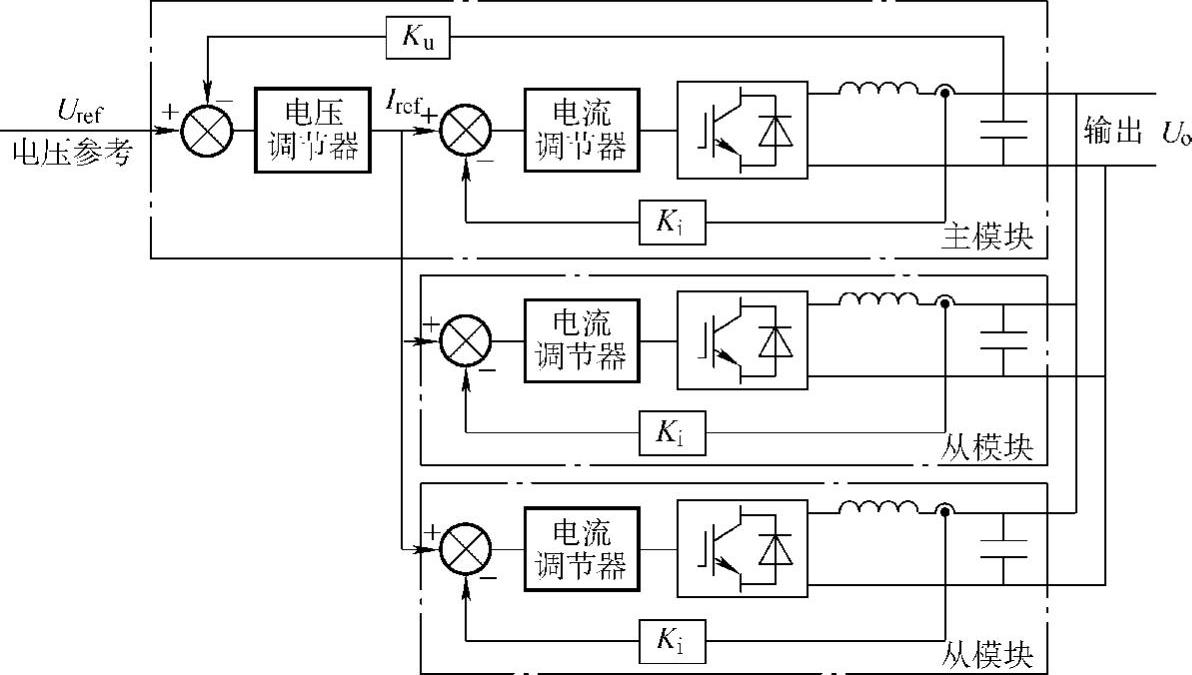
图7-16 三单元逆变器主从并联系统原理框图
(2)轮主均流法:在图7-13中,当μ1,…,μn中的每一个轮流为1,其他条件同DM,就得到轮主均流法。这种方法中,每个模块都具备作为主模块的能力(均有自己的电压和电流环),并通过专门的控制逻辑或软件获得对等的机会;输出电压由轮值主模块控制,并产生模块的电流给定信号,其余(n-1)个从模块的电压环不再起作用,而电流给定为主模块的电压环输出。RM的思想与DM相比在提高可靠性方面确实是一个进步,但由于主模块的不断更替会造成输出电压波动,控制实现上也相对复杂。
(3)自主均流法:当图7-13中,μ1,…,μn换成理想二极管时,就得到自主均流法(又称“民主均流法”或“最大电流法”)。在这种方法里,每一时刻输出电流最大的模块自动作为主模块,其输出电流转化为电压信号送到均流母线CSB上。从模块按一定控制模式调节控制信号,以矫正负载电流的不平衡。图7-17是其典型实现,与图7-14的不同仅在于将电阻换成了二极管。
自主均流法在3种主从控制法中最为电源设计者所认可,并在实际中得到广泛应用。优点:单一均分母线连接;主模块是随机的,容错能力好,适于冗余控制;易于扩展和维护。不足:主从切换存在随机性,导致暂态均流性能差;由于二极管正向压降的差别,导致可能的均流失败。
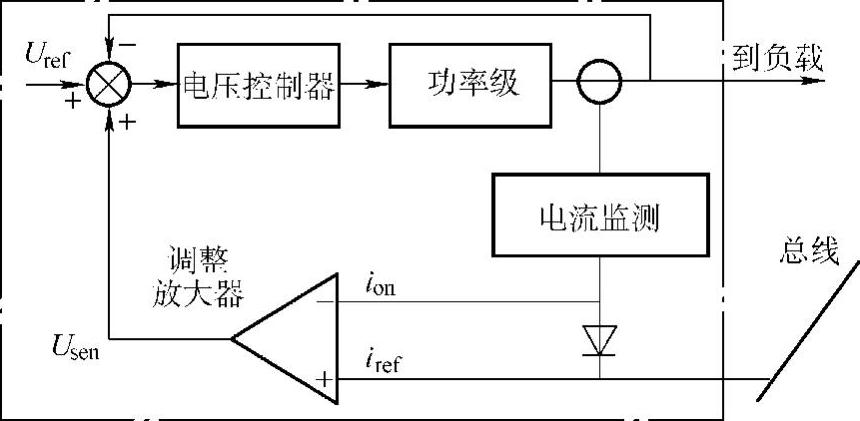
图7-17 自主均流控制法
(4)3C控制均流法:又称循环链控制(Circular Chain Control,3C)。基于减少对其他模块信息依赖程度的考虑,采用“链接跟踪”思想,有学者提出了3C型逆变器并联方案。将第一台逆变器的输出电流反馈信号加到第二台逆变器的控制回路中,第二台的输出电流反馈信号加到第三台,依次连接,最后一台的输出电流反馈信号返回到第一台逆变器的控制回路。这样,循环链中的各个模块的电流环跟踪前一个模块的电感电流,最后一个模块跟踪第一个模块的电感电流,使整个并联控制系统在信号上形成一个环形结构,在功率输出方面形成并联关系,如图7-18所示。
由于3C型方案主动引入了其他模块的信号,从而强化了各模块之间的耦合关系。3C型存在环形的信号通路,虽然每一模块仅接受上一模块的信号,但信号中已包含了其他模块的电流信息。根据此信息,采用适当控制器,模块可以自主实现均流。从形式看,子模块的电流给定只由自身给定信号、反馈信号、上一模块电流信号决定,与其他n-2个模块无关,大大减少了模块之间的信号连线。
另一方面也正是因为3C型方案强化了模块之间的耦合,使得常规方案难以控制,因此有采用H∝理论设计控制器以解决稳定性问题。当然,H∝控制器复杂,且设计难度大,必须采用数字控制实现。
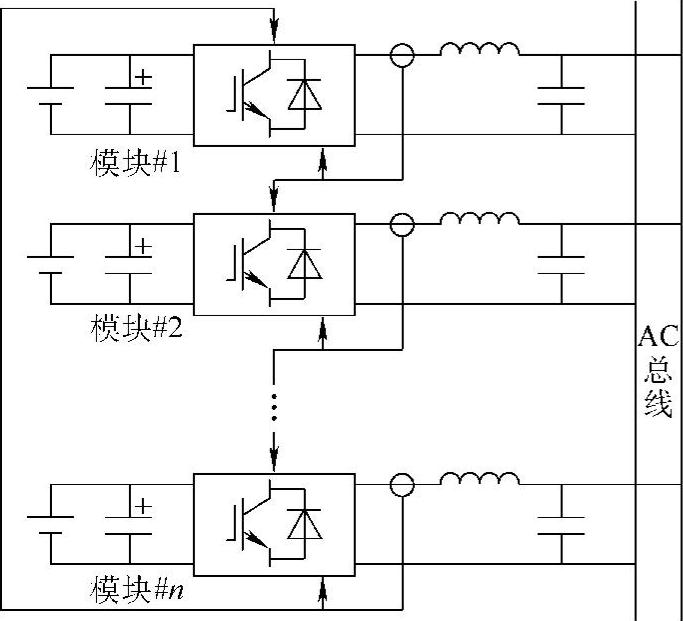
图7-18 基于3C控制法的逆变 电源控制框图
综上所述,现有并联控制技术的特点主要表现为:并联数较少、有互连信号线、冗余性不够;为适应系统高控制性能和相对复杂化的并联控制算法的要求,数字化控制手段受到青睐。
随着功率变换电源向大容量等级和高功率密度方向发展,促进了逆变器并联技术的迅速发展和不断成熟,高可靠性、高冗余度、智能化控制是主要发展方向,具体表现为:①无互连线并联结构将成为研究热点,逐步实现自由并联。一方面,无须专设外部控制单元,并联操作更加简单、可靠、灵活;另一方面,并联的单元数越来越多,且可实现热插拔。②研究模块并联软投切控制技术以及瞬时环流抑制技术,提高系统动态过程中均流控制性能,提高系统并联运行可靠性。③关注波形畸变对均流性能的影响,尤其非线性负载条件下的均流问题,开展并联系统负载适应性研究。④控制方法由经典控制理论向现代控制理论转变,数字化、智能化控制技术日趋成熟。⑤不同容量逆变器单元的并联方法研究。⑥远程通信与监控技术,实现并联系统的网络化管理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






