人类思维的物理结构是人脑神经网络,它由几亿个神经元通过生理结构形成了人脑的物理结构。大脑神经元树突接受信息激活细胞体发出的信息,通过轴突传给另一个神经元。人工神经网络以计算机仿真的方法从物理结构上模拟人脑,使系统具有人脑的某些智能,以神经元节点模拟神经细胞体,以神经元节点间的连接强度模拟树突和轴突,用作用函数模拟突触的作用。人工神经网络理论的研究是当前许多工程研究领域的热点话题,它的应用领域非常广泛,仅在与工业自动化相关的领域,如模式识别、信号处理、知识工程、专家系统、优化组合、智能控制等方向的研究中,已经有许多神经网络应用成功的论文报道。然而在电力电子电路控制中,神经网络的应用相对较少,相关实现多为在外电压环中起到监督控制的作用或是对开关等故障进行分类识别。将神经网络技术与滞环控制结合,可以实现基于神经网络的直接电流控制,如图6-55所示。
则电流误差与开关函数的关系为
s=1,当i*-i>h
(6-152)
s=1,当i*-i≤h
且d(i*-i)/dt≤0(6-153)
s=0,当i*-i<-h(6-154)
s=0,当|i*-i|<h且d(i*-i)/dt>0(6-155)
式中,h为常数,表示系统运行的电流容差带。神经网络与滞环控制的结合可以发挥各自的优势。应用神经网络实现电流调节,可以发挥神经网络快速的信号处理、学习和概括能力,对参数的变化具有不灵敏性,以期望提高系统的鲁棒性。构造如图6-56神经网络对开关电路进行控制。
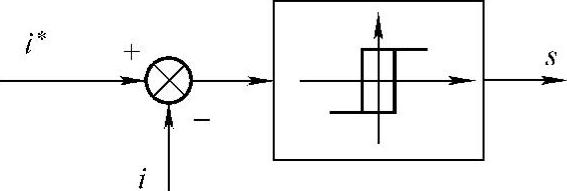
图6-55 直接电流控制器
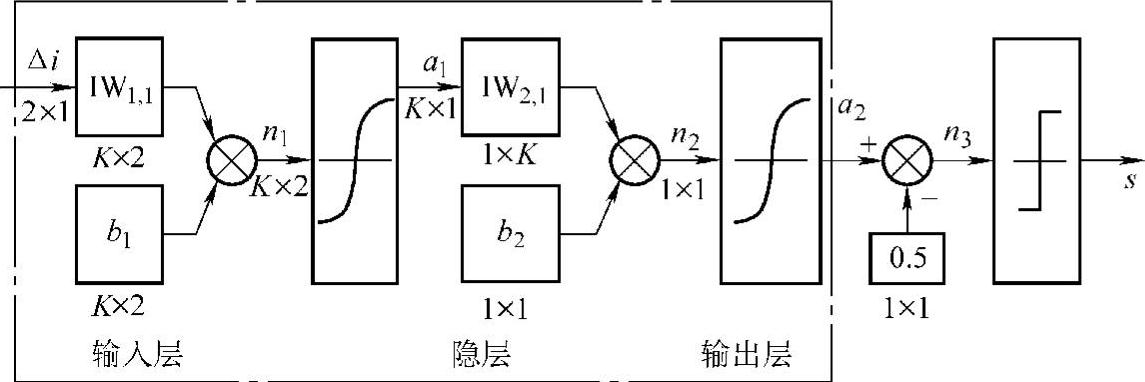
图6-56 神经网络电流控制器
图6-56中神经网络的输入为电流误差量及其微分量,网络的输出为开关信号。网络的设计思想就是依据误差分类得到对应门极信号。在神经网络模型中,通过BP算法训练的多层前馈网络以其算法的系统性、完整性和应用的简便性,优于其他形式的网络,其强大的分类功能,特别适合于模式识别和分类的应用。BP网络简单、灵活、易于实现,虽然存在训练速度慢、易于陷入局部极小等缺点,但如果主体训练可以离线完成,则不会影响系统的实时控制。对于一个BP网络,随网络规模扩大其学习复杂性呈指数爆炸,如果输入层和隐层的节点较多,而且收敛的速度会相应地减慢,因此输入数据形式的选取是网络构造中的一个关键问题,直接关系网络的性能。鉴于神经网络的识别特性,在该电路中BP网络可以模拟实现滞环电流控制的功能。
BP网络结构的内部结构可离线训练得到。训练过的神经网络能存储有关过程的知识,能直接从定量的、历史的信息中学习。网络结构可根据需要采用有限结点构成,以保证在运算时间、精度等方面可以满足实时控制的需要。该网络学习了直接电流控制的基本功能,由于神经网络能够滤除噪声,在这个背景下,神经网络控制器具有可以在有噪声的情况下得出正确结论的能力。定义误差及误差变化率为
e=i*-i=1,当i*-i>h(6-156)
e=i*-i=-1,当i*-i≤-h(6-157)(www.daowen.com)
r=de/dt=1,当de/dt>0(6-158)
r=de/dt=-1,当de/dt≤0(6-159)
应用误差反传算法对网络进行训练。误差反传学习算法的主要思想是把学习的过程分为两个阶段:第一阶段(正向传播过程),给出输入信息通过输入层经隐含层逐层处理并计算每个单元的实际输出值;第二阶段(反向传播过程),若在输出层未能得到期望的输出值,则逐层递归地计算实际输出与期望输出之间的差值(即误差),以便根据此差调节权值。设计网络结构为带隐层的结构。这种网络不仅有输入层节点,输出层节点,而且还有一层或多层隐含层节点。对于输入信息,要先向前传播到隐含层的节点上,经过各单元的特性为Sigmoid型的激活函数运算后,把隐含节点的输出信息传播到输出节点,最后给出输出结果。神经网络的导师信号见表6-3。
表6-3 神经网络滞环控制导师信号
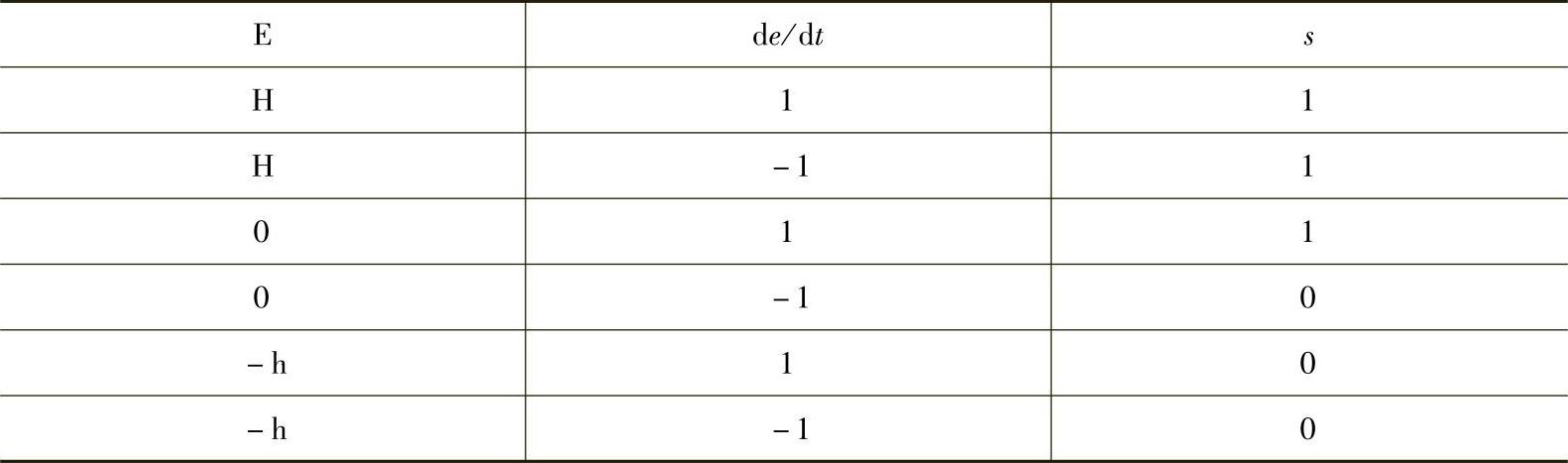
网络的学习过程由正向和反向传播两部分组成。在正向传播过程中,每一层神经元的状态只影响下一层神经元网络。如果输出层不能得到期望输出,就是实际输出值与期望输出值之间有误差,那么转入反向传播过程,将误差信号沿原来的连接通路返回,通过修改各层的权值,逐次地向输入层传播去进行计算,再经过正向传播过程,这两个过程的反复运用,使得误差信号最小。实际上误差达到人们所希望的要求时,网络的学习过程就结束了。将这种控制思想用于三相变流器的电流控制。对于三相变流器,假设主电路三相参数对称,输入为理想三相正弦电压源。
图6-57所示为三相神经网络控制器。
三相变流器任意时刻总有3个开关处于开状态,另3个处于关状态。上下桥臂不能同时导通。可以构造神经网络电流内环控制器,应用一个完整独立的网络而不是3个互不相关而具有同样电流控制功能的网络来实现三相变流器的控制,这样,三相电流的控制在一个网络中实现,可以体现一些神经网络控制的特殊特性。算法中对于每一个开关矢量共有27种导师信号,8个矢量共有216组导师信号。
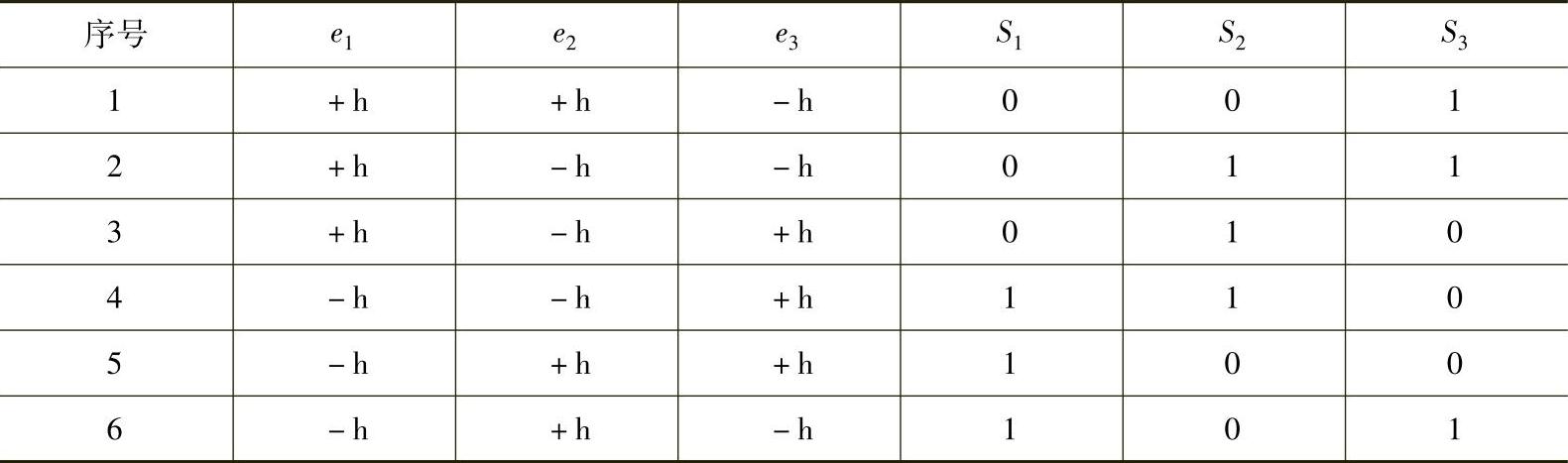
图6-58给出谐波电流控制实现时电流及其频谱图。由于上面所述算法输入信号较多,因此神经网络结构将相对复杂,为进一步简化系统结构优化控制性能,对网络进行改造,实现改进神经网络控制。输入量减为3个,仅以边界点作为导师信号,得到6组导师信号,见表6-4。
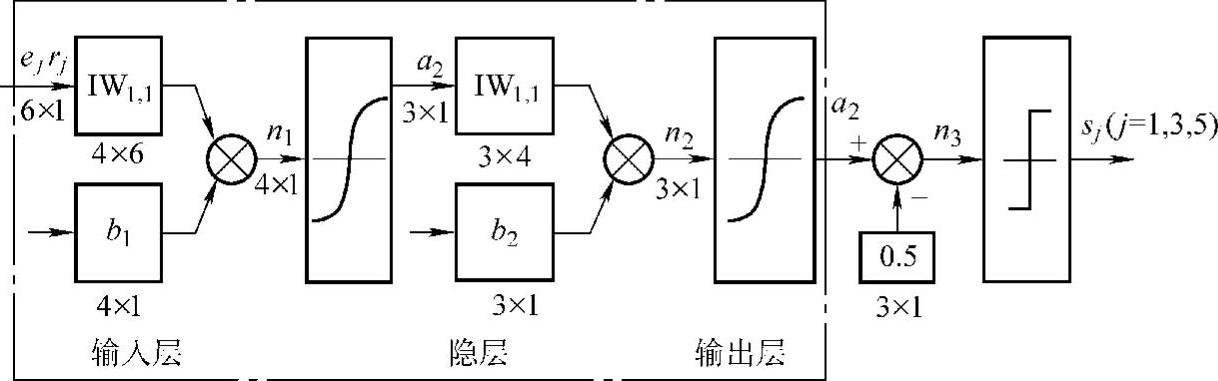
图6-57 三相变流器神经网络控制器
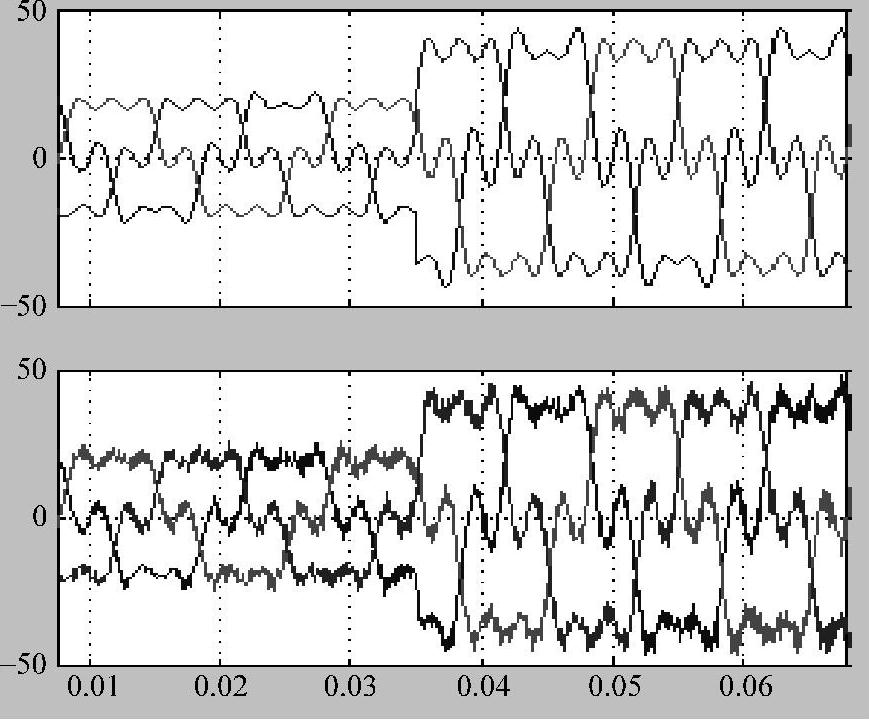
图6-58 神经网络控制器电流控制效果
表6-4 网络的导师信号
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







