重复控制在周期性外激励信号的跟踪或抑制方法中,占有重要的地位。这一方法最早应用于质子加速器控制当中,并取得了良好的控制效果。重复控制以其相对简单的控制结构,高精度的完成控制任务的优异特性,而得到了学者的普遍关注,并大量应用于各种含有周期信号的控制场合,如机械手轨迹控制,磁盘、光盘驱动器,卫星姿态矫正的伺服机构等。
近年来该方案在逆变电源中的应用研究亦方兴未艾。这是由于在逆变电源中因非线性负载等众多因素引起的干扰具有周期性,最终这种性质的干扰将导致输出波形畸变亦具有重复性。因而利用重复控制的特殊性质,能够大大消除输出电压波形的谐波。
内模控制与重复控制,重复控制是基于内模原理的一种控制思想。所谓“内模”,是指在稳定的闭环控制系统中包含外部输入信号的数学模型。下面是内模原理的具体表述:对于一个控制系统而言,如果控制器的反馈来自被调节的信号,且在反馈回路中包含相同的被控外部信号动态模型,那么整个系统是结构稳定的。内模原理的本质是把系统外部信号的动力学模型植入控制器以构成高精度的反馈控制系统。这样的系统能够无静差地跟随输入信号。对于所有的无静差系统,都存在这样的问题,即当输入信号趋于零时,如何保证继续输出适当的控制信号,维持合适的控制作用。此时虽然给定信号和反馈信号依然存在,但误差信号为零,系统信号通路已经断开,输出与输入无关,这就要求控制器中必须包含能够反映外部指令信号或干扰的模型,该模型能持续不断地输出相应的控制信号。从这个角度来说,内模的作用类似于一个信号发生器,可以不依赖外部变量给出控制信号。普遍应用的PI调节器能够无静差地跟踪阶跃信号就是一个典型的例子。阶跃信号的数学模型为1/s,而闭环系统中的积分环节也是1/s,系统包含了外部信号的数学模型,从而获得了无静差的跟踪给定信号的能力,可以将PI控制理解为内模原理的一个典型应用。
重复控制内模设计,如果我们可以找到一种可以发出基波及任意次谐波的内模,在理论上就可以实现无静差的跟踪控制。采用如下形式的内模:

L为给定参考信号的周期。这是一个周期延时正反馈环节,不管什么形式的信号,只要重复出现,而且频率是1/L的倍数,那么该内模的输出就是对输入信号的逐周期累加。当输入信号衰减为零,该内模依然会不断地逐周期输出与上周期相同的信号,相当于任意信号发生器。因此这样的内模能够满足要求。采用这种特殊形式内模的闭环控制系统称之为重复控制系统。
由于式(6-135)中的纯延时环节难以用模拟器件实现,因而在应用中重复控制都是以数字形式实现的。重复控制器内模的离散形式为

N为一个基波周期的采样次数。这样就可以得到重复控制系统的基本框图如图6-46所示。
根据图6-46可得到系统的闭环传递函数为

由式(6-137)可以得到系统稳定的条件为

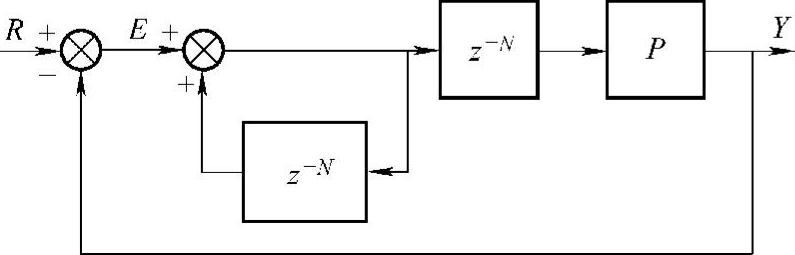
图6-46 重复控制系统基本原理框图
重复控制系统的改进,但是在一般情况下,被控对象难以在整个频段内满足式(6-138)的稳定条件,此时必须对控制器加以改造。改造后的重复控制系统框图如图6-47所示。图6-48所示为逆变器参数。下面将以单相全桥逆变器为例,介绍重复控制器的设计方法。
此时系统稳定条件为

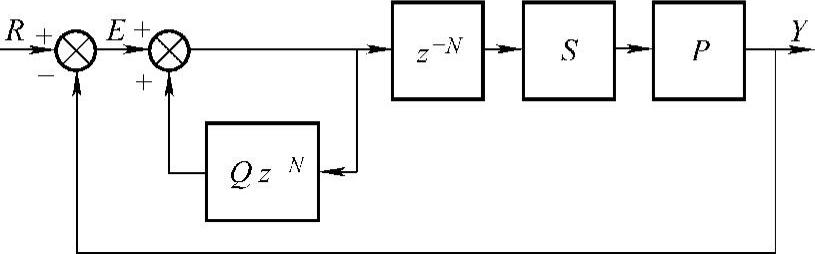
图6-47 改进型重复控制系统原理框图
图6-49是重复控制系统稳定性条件的图形表述。H=Q-SP。当Q=SP时,所有的极点都位于原点上,此时系统的收敛速度最快。根据内模原理,理想情况下Q=1,此时SP=1。所以当SP的轨迹具有零增益、零相移的特性时,系统具有最好的性能。因此,理想的补偿器应为S=1/P。控制对象的数学模型为

上式中D为输入正弦调制信号,由于采用数字控制,将其离散化后得到(采样时间:0.0001s):(www.daowen.com)

因此,补偿器S为
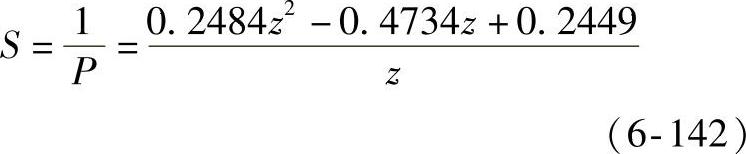
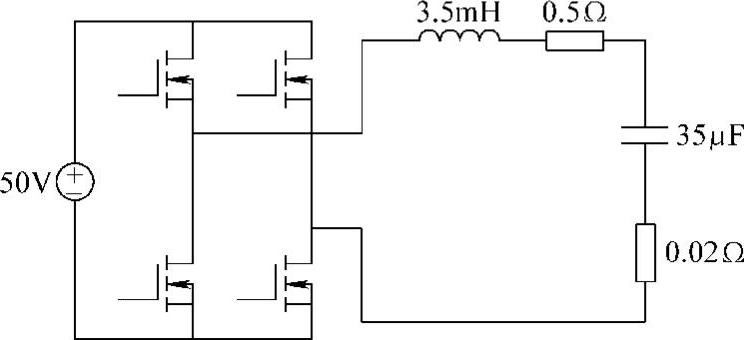
图6-48 逆变器参数
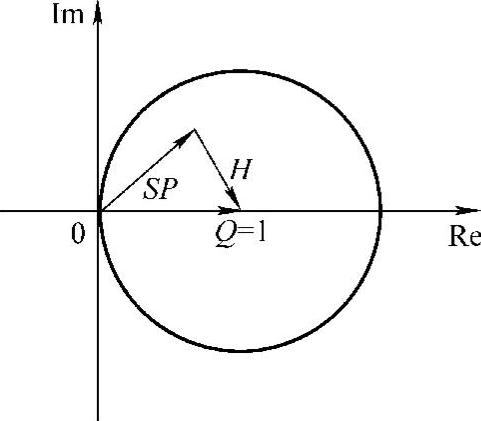
图6-49 系统稳定性条件的图形表述
但是由于存在建模误差,幅值和相位的补偿不可能很精确。对于实际系统而言,中低频段的模型比较准确,可以得到比较理想的补偿效果。但在中高频段,模型误差较大,当频率高于某一值时,SP的相角可能超出(-90,90)的范围,由于单位圆是与虚轴相切的,因此只要SP的幅值不为零,SP的轨迹必然超出单位圆,使系统变得不稳定。图6-50是电感参数发生10%的变化时,SP的伯德图。
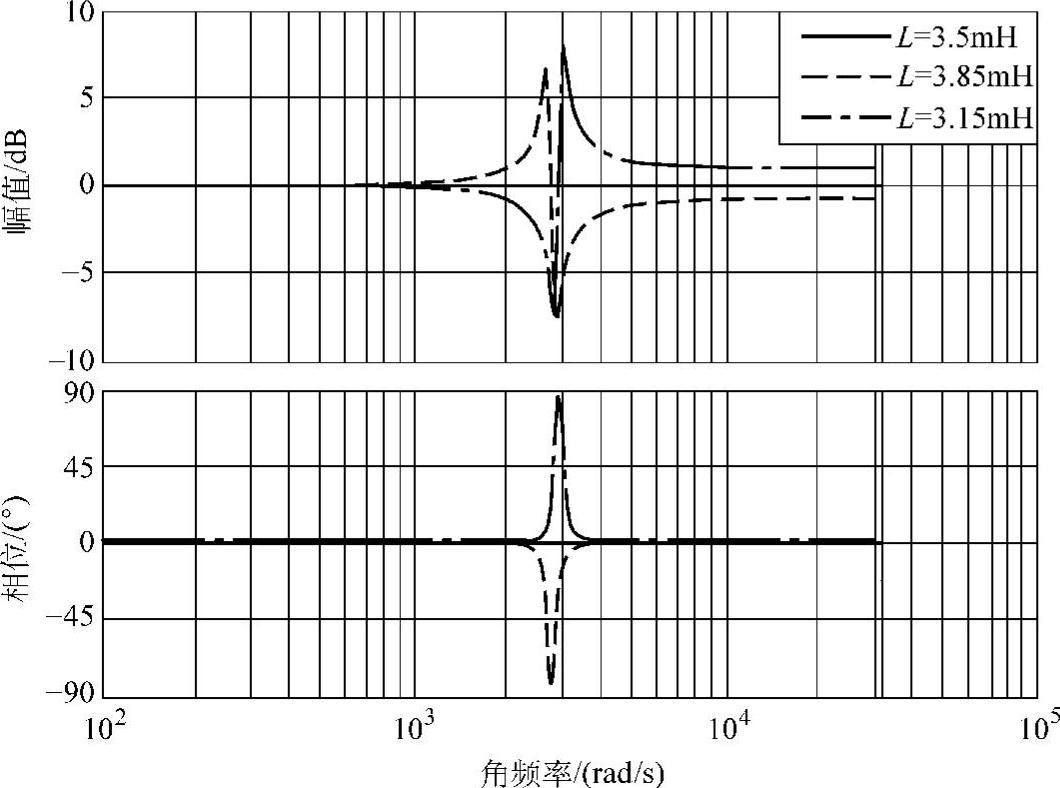
图6-50 电感参数变化时SP的伯德图
从图6-50可以看到当实际电路参数存在误差时,SP将不能达到零相移、零增益的效果。尤其在谐振频率点处,补偿效果最差,极易出现不稳定的情况。
改进内模Q的设计 如果重复控制器的内模采用改进型的内模,就可以有效地改善系统稳定性。Q可为小于1的常数,也可以为具有低通性质的函数。但是引入Q之后,当输入信号为零时,改进型内模的输出不能完全复现上个周期的信号,而是逐周期的衰减,这样系统将出现静差。如果Q为常数,单位圆的圆心左移1-Q,单位圆包含2,3象限的一部分。此时即使相位误差超过(-90,90),只要SP的增益足够小,系统仍能保持稳定。如果Q为低通函数,单位圆的圆心不再是固定值。在低频段,圆心位于(1,0)点,单位圆与虚轴相切,由于补偿精确,系统可以保证稳定。但是随着频率的提高,Q的幅值减小,圆心逐渐左移,单位圆进入2,3象限,虽然补偿不精确,但是只要SP的增益足够小,还是可以保证系统的稳定。与常数Q相比,采用具有低通函数的Q可以使矢量SP的变化范围更大,从而获得比常数型Q更大的稳定裕度。图6-51是Q减小时,系统稳定裕度增大的图形表示。可以看到即使SP的相角超出(-90,90)的范围,只要其幅值足够小,就可以保证系统的稳定。
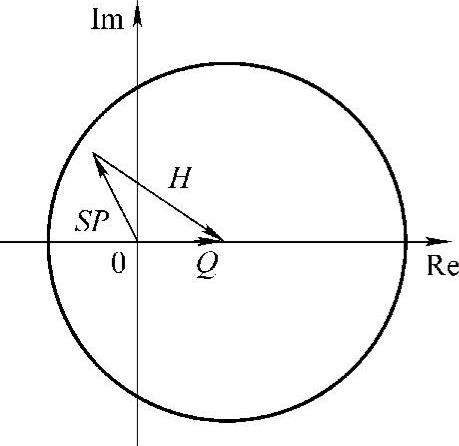
图6-51 改进型内模稳定裕度增大的图形表述
补偿器S的设计:从上面的分析可以看到,在中高频段为了保证系统的稳定性,不论采用哪种形式的Q,都需要SP的增益小于一定的值,这就提出了另一个对补偿器S的设计要求,那就是在补偿不精确的高频段具有衰减特性。通常补偿器S设计为如下形式:
S=SP·flowpass·zn(6-143)上式中的SP=1/P,flowpass为补偿滤波器,zn为针对补偿滤波器造成的相位延迟设置的相位补偿环节。
从系统稳定性的角度考虑,补偿滤波器的截止频率应设的低一些,保证SP在补偿不精确频段增益足够小;从系统动静态性能考虑,则希望截止频率尽量高一些,保证更宽频段的谐波抑制能力。所以系统的稳定性和动静态性能之间是一对矛盾,要折中考虑。为了保证系统稳定的前提下使系统动静态性能更高,就对补偿滤波器的设计提出了很高的设计要求。目的就是为了获得衰减特性更陡峭的滤波器。
目前常见的设计方案有两种,一是二阶低通滤波器和零相移陷波滤波器组合。二阶低通滤波器由于衰减特性不陡峭,只能用来对高频段进行衰减,不能寄希望于它对补偿效果最差的谐振频率处进行有效的衰减。零相移陷波滤波器对特定的频率有很强的衰减和较陡峭的斜率,对周围频段增益影响较小。且具有零相移的特性。以上两种滤波器配合使用,可以获得较理想的中高频段衰减特性。此方案的缺点就是设计复杂,实现困难。
另一种常用的方案是FIR数字滤波器。阶数在50以上的FIR数字滤波器可以提供较理想的衰减特性。这种滤波器还有一个明显优点就是具有线性的相移特性,对它产生的相位延迟可以方便地计算和进行精确的补偿。关于FIR滤波器的设计和实现也有很多软件和资料支持。MATLAB提供了FIR滤波器的设计界面。TI网站公布了FIR滤波器基于MATLAB的设计程序和C语言环境及汇编语言环境的程序包。以上这些技术支持极大地方便了FIR滤波器的实际应用。图6-52就是采用阶数为50,截止频率为1000Hz的FIR滤波器设计的补偿器对电感参数发生10%变化时的控制对象进行补偿的伯德图。从图中可以看到,谐振频率处原有的尖峰已经被有效衰减,配合Q的合理设计,可以保证系统的稳定性。
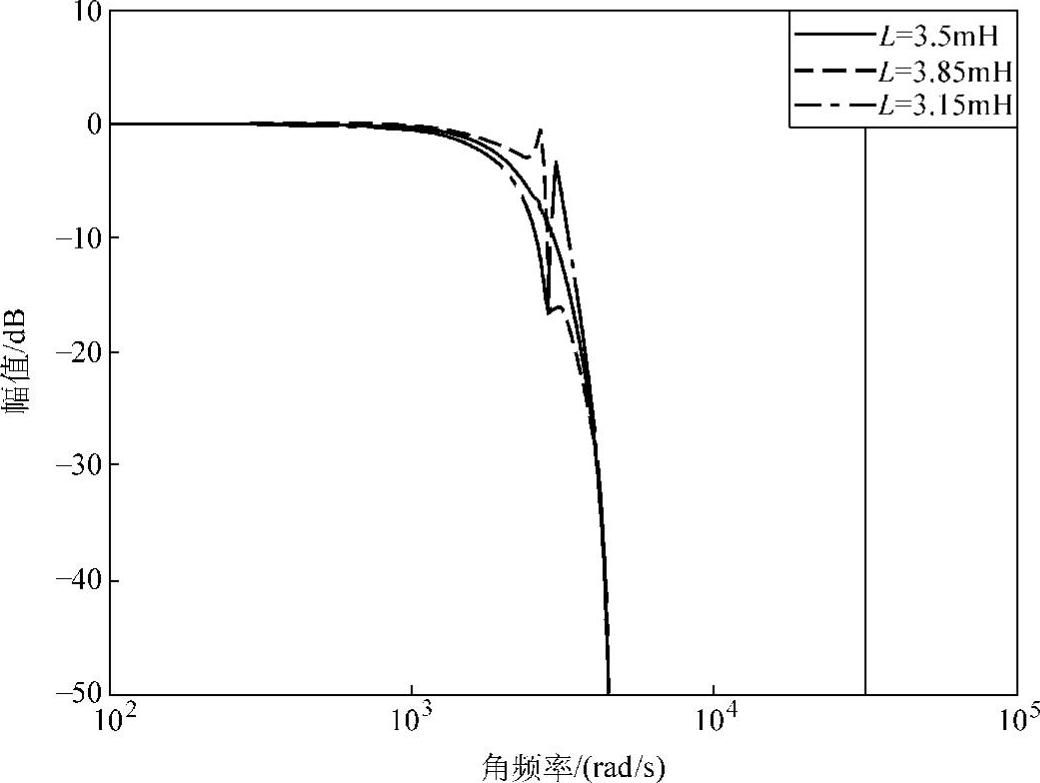
图6-52 补偿器进行改造后的补偿效果图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






