在复杂系统的控制过程中,模糊控制器的自适应功能,一直是控制系统设计者们所追求的目标。自适应模糊控制器的设计应遵循以下两个目标功能:①根据被控过程的运行状态给出合适的控制规则,即控制功能。②根据给出的控制规则的控制效果,对控制器的控制决策进一步改善,以获得更好的控制效果,即学习能力。因此,自适应模糊控制器是同时执行系统辨识和控制任务的,其本质是通过对控制器性能的观察,作出控制决策,并用语言形式描述策略。自适应模糊控制器的结构框图如图6-45所示。
一般而言,自适应模糊控制器是在常规模糊控制的基础上增加了以下3个功能块构成的:①性能测量,用于测量实际输出特性与希望特性的偏差,以便为控制规则和参数的修正提供信息,即确定输出响应的校正量。②控制量校正,将输出响应的校正量按照一定规则转换为对控制量的校正量。③控制规则和参数修正,对控制量的校正通过修改控制规则和参数来实现。
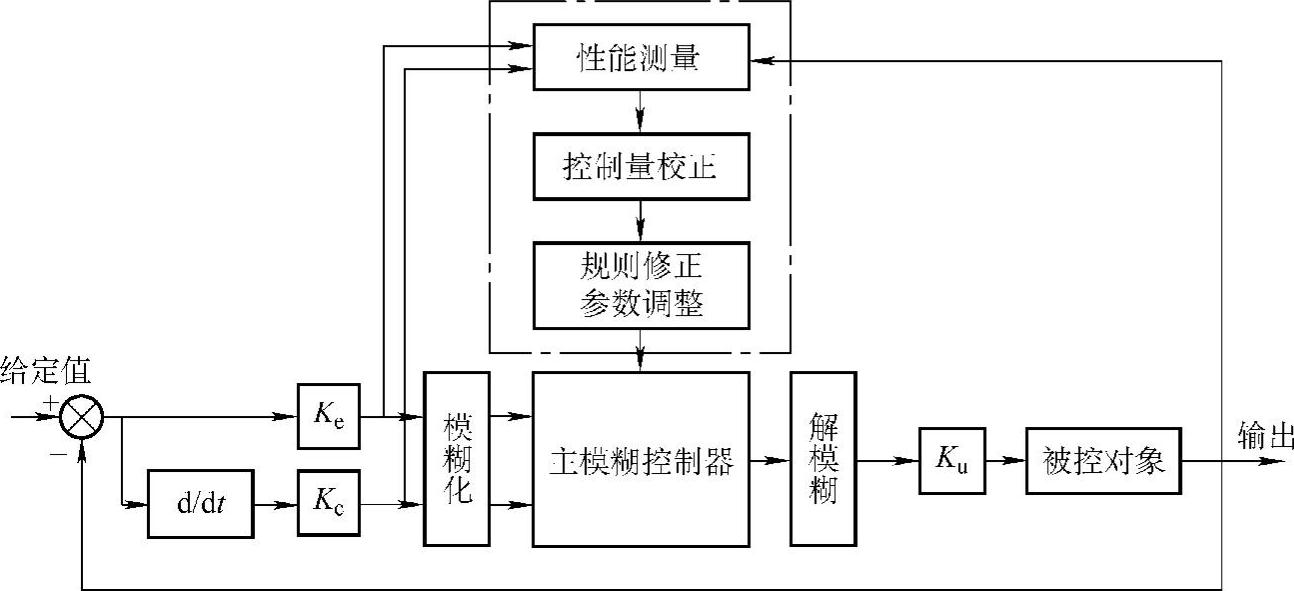
图6-45 自适应模糊控制器的结构框图
对模糊控制自适应方法的研究始于20世纪70年代末、80年代初。近年来人们提出了各种方法,典型的有如下几类:基于模糊模型的自适应模糊控制;模糊模型参考自适应控制;自适应递阶模糊控制;结合神经网络的自适应模糊控制;结合遗传算法的自适应模糊控制;基于量化、比例和规则因子的自调整方法。
前述的几种自适应模糊控制方法,虽然在理论研究上取得了一定成果,但要么是由于本身理论尚不成熟,要么算法过于复杂或在实际应用中限制条件太多,难以实现实时控制。而基于量化、比例因子和规则因子的自调整方法,由于算法简单高效,控制效果较好,是自适应模糊控制应用于实时控制中最有效的方法。控制器在线识别控制效果,依据系统误差、误差变化、各种性能指标如上升时间、超调量、稳态误差和振荡发散程度等对参数进行自整定。量化、比例和规则因子的自调整不仅在方法上有了很多进展,同时也在实践中取得了较成功的应用。本课题工作着眼于模糊控制在逆变器控制系统中的应用研究,由于逆变器工作于高频开关状态,对控制的实时性要求较高,因此控制算法是否简单、有效及其实用化程度成为选择自适应模糊控制方法类型首要考虑的因素之一。基于以上分析,本课题主要对量化和比例因子自调整这一类自适应模糊控制方法进行研究。
自调整比例因子模糊控制器的设计,在系统控制过程中,比例因子对系统控制性能和稳定性影响更为明显,尤其是在系统初始运行阶段。从手动控制经验看也是如此,操作者主要是根据误差和误差变化,以及系统的控制性能指标来调整控制器的输出增益,即比例因子的大小,以达到理想的控制效果。
基于以上分析,在常规模糊控制器的基础上,引入一个辅助模糊控制器,根据控制过程中根据误差和误差变化的大小及关系,产生一个控制量来实时地修改比例因子,使系统具有更好的输出性能,实现在线自调整比例因子模糊控制。假设主模糊调节器同上,下面介绍辅助模糊控制器。(https://www.daowen.com)
辅助模糊控制器为PD型二维结构,其输入变量与主模糊控制器相同,为误差E(K)、误差变化量EC(K)=E(K)-E(K-1),输出变量为比例因子Ku的调整系数α。α的模糊子集定义为{VS,S,SM,M,BM,B,VB},论域为[0.5,1.5]隶属函数采用对称三角形均匀分布,其图形与U的隶属度函数相同。辅助模糊控制器的输出量α的模糊控制规则见表6-2。
表6-2 辅助模糊控制器模糊控制规则表
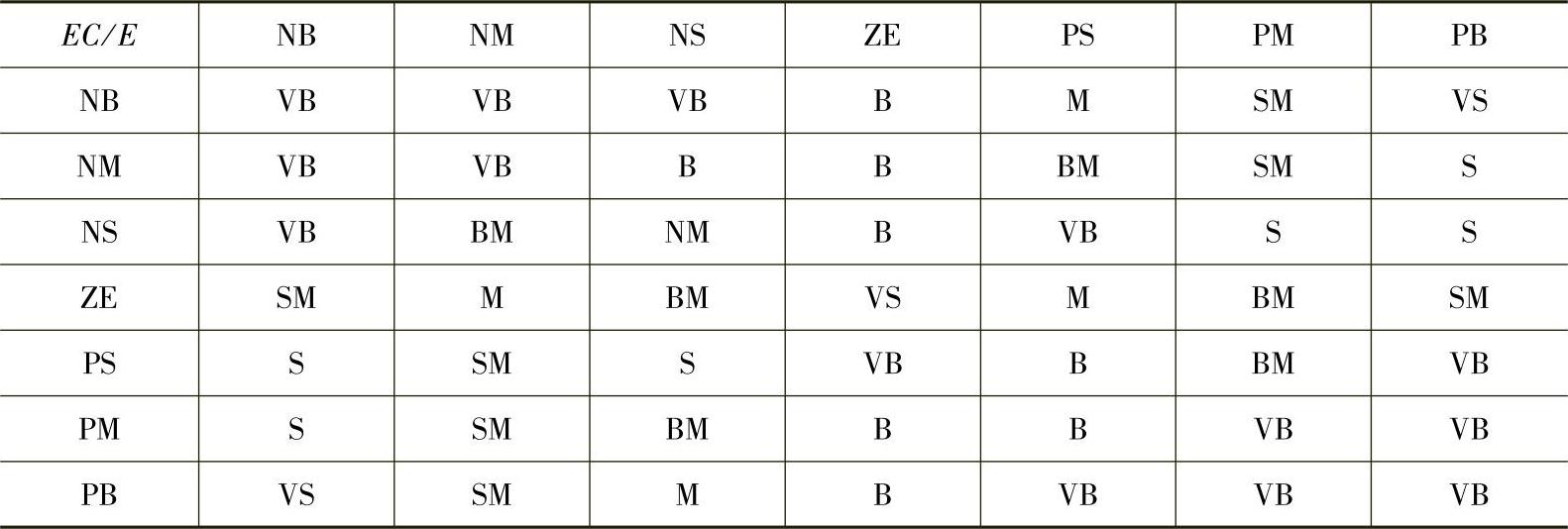
对于表6-2有几点需要说明:①表中所列出的辅助模糊控制器输出量α的模糊控制规则,是结合主模糊控制器的控制规则得到的。②为保证模糊控制器的输出响应具有较小的超调和较短的上升时间,当误差E较大,且与误差变化EC符号相反时,应适当减小控制器比例因子的大小。比如此时有控制规则:If E is PB and EC is NS then α is S或If E is NM and EC is PM then α is SM。当误差E较大,且与误差变化EC符号相同时,系统响应正加速偏离设定值,为减小这种不利趋势,应增大比例因子。如此时有控制规则:If E is PB and EC is PS then α is VB或If E is NM and EC is NM then α is VB。③当系统响应在设定值附近时(此时误差E较小),为防止产生较大的超调或欠调,比例因子应该具有较宽的变化范围。比如当系统响应刚达到设定值,但又具有迅速向上偏离的趋势时,应适当加大比例因子以减小超调,如此时有控制规则If E is ZE and EC is NM thenα is B或If E is NS and EC is PS then α is S。
比例因子调整量α与误差E和误差变化EC的关系可用定义为下式:
α(K)=f[E(K),EC(K)](6-134)式中,f为E和EC的非线性函数,根据一定的模糊控制规则来描述,α的值完全取决于系统的瞬时状态,而与被控对象模型无关。这种基于比例因子的自调整方法实际是一种独立于模型的非线性的可变增益控制器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






