比例复数积分控制基本原理如下:
比例复数积分控制器的传递函数为

由上式可见,比例复数积分控制器在基波频率ω0处的增益趋于无穷大。并网逆变器工作于电流控制模式,采用比例复数积分控制时,系统的结构框图如图6-34所示。由于比例复数积分控制器在基波频率ω0处的增益趋于无穷大,因此其对稳态误差的消除和抗干扰能力非常优越。

图6-34 比例复数积分控制的单相并网逆变器控制框图
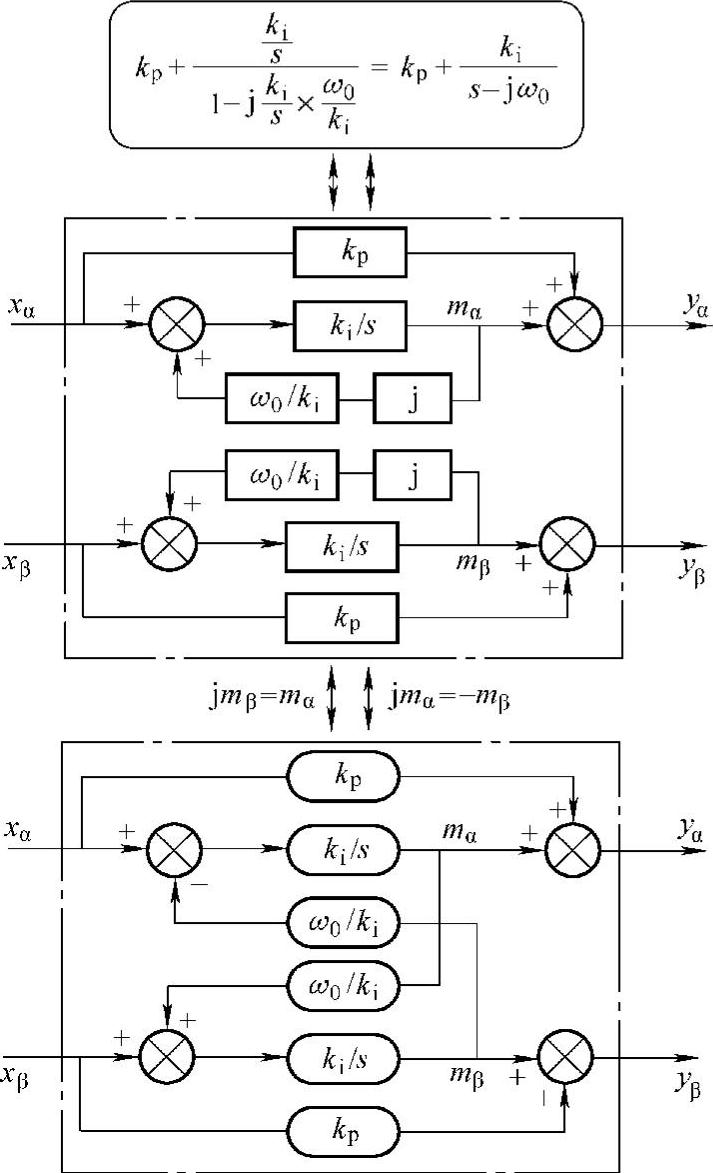
图6-35 比例复数积分控制的具体实现
传统控制器一般为实数域控制器,而PCI控制器中存在复数j,为复数域控制器,给控制器实现带来一定困难。然而,根据复变函数理论可知,j代表幅值不变,相位正向旋转90°。在三相系统中,利用αβ坐标系变量mα=jmβ这一关系实现j,如图6-35所示。在单相系统中需要构造伪旋转坐标系实现。
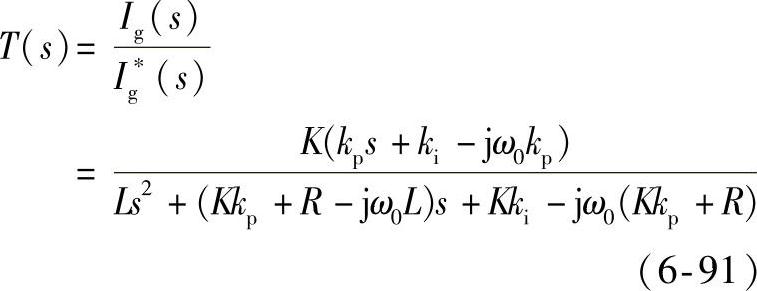
为了保证系统具有较快的响应速度,同时避免放大噪声,系统带宽范围一般选择高于基波频率10倍且低于开关频率1/10,因此系统带宽fb选择范围为500<fb<1000。为了得到系统带宽的表达式,首先根据系统闭环传递函数求出系统闭环幅频特性。系统闭环传递函数及其幅频特性和相频特性如下:
 (www.daowen.com)
(www.daowen.com)

只考虑kp时,系统闭环幅频特性如下:

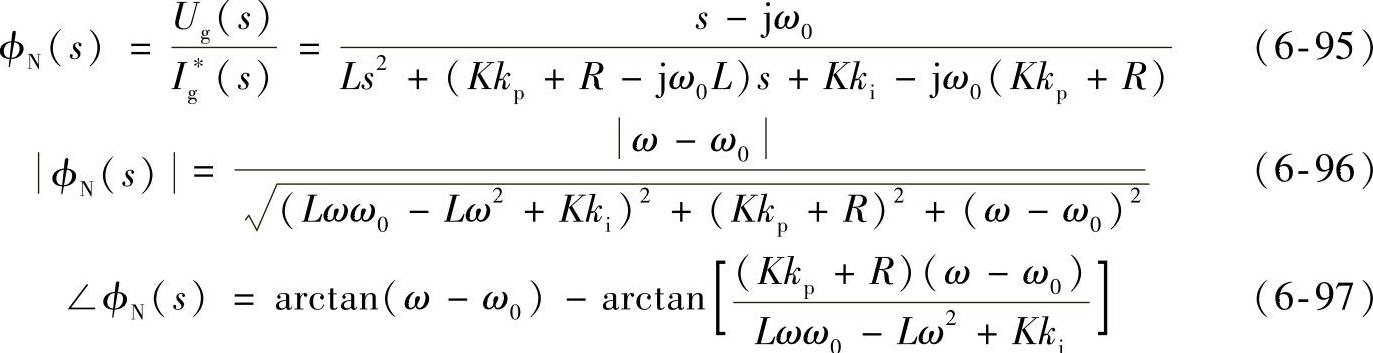
系统带宽定义为当系统闭环幅频特性的幅值降到-3dB时对应频率为ωb,0~ωb的频率范围称为系统的带宽,据此可以根据期望带宽选择可得kp。进一步可以设计复数积分系数ki。系统抗扰特性传递函数及其幅频特性和相频特性如下:
闭环系统的伯德图如图6-36所示。闭环系统在基波频率处的幅频特性为1,相频特性为0;系统的抗扰幅频特性在基波频率处为0,相频特性也为0。这说明系统实现了零稳态误差控制。
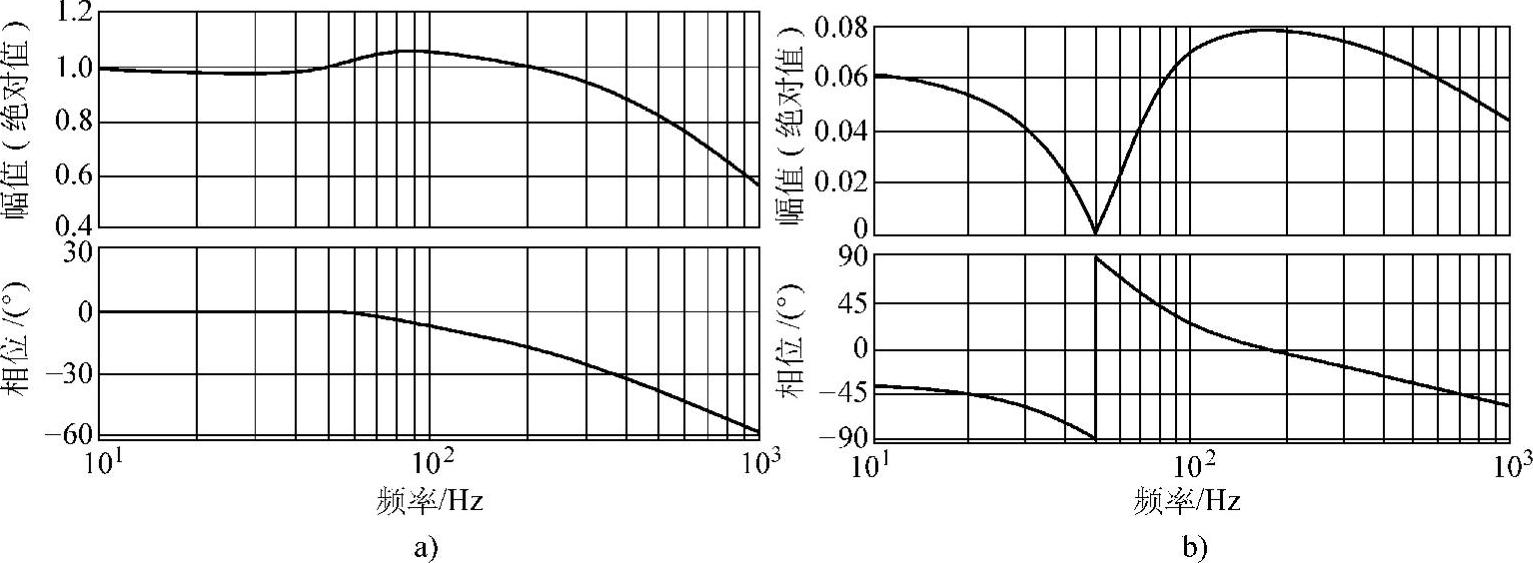
图6-36 比例复数积分控制下的闭环系统伯德图
a)输入/输出特性 b)抗扰特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





