【摘要】:由于在两相静止坐标系中两轴模型相同,而且互不耦合,可以对任意轴施加单位阶跃信号,获得相应的单位阶跃响应波形构成波形库。图6-28是采集到的d轴控制对象单位阶跃响应波形。令aN=aN+i=a∝,于是系统的单位阶跃响应序列模型就可以表示为变流器控制中,k时刻所需的控制增量为波形库控制方法就是这样利用控制对象的单位阶跃响应采样值{ai}来完成对系统的控制的。
假如把旋转坐标系中的耦合量看作扰动量,那么三相逆变器在两相旋转坐标系中的模型和在两相静止坐标系中的模型完全一致。在两相静止坐标系中建立的波形库可以直接应用到两相旋转坐标系。两个轴虽然存在一定的耦合关系,但是耦合量都是低频的直流量,不会影响整体系统的无静差特性。通过状态量前馈,可以实现解耦。由于在两相静止坐标系中两轴模型相同,而且互不耦合,可以对任意轴施加单位阶跃信号,获得相应的单位阶跃响应波形构成波形库。要建立d轴模型,可以保持q轴输入量dq为零不变,输入量dd施加单位阶跃信号,对输出电压在旋转坐标系下进行采集。图6-28是采集到的d轴控制对象单位阶跃响应波形。
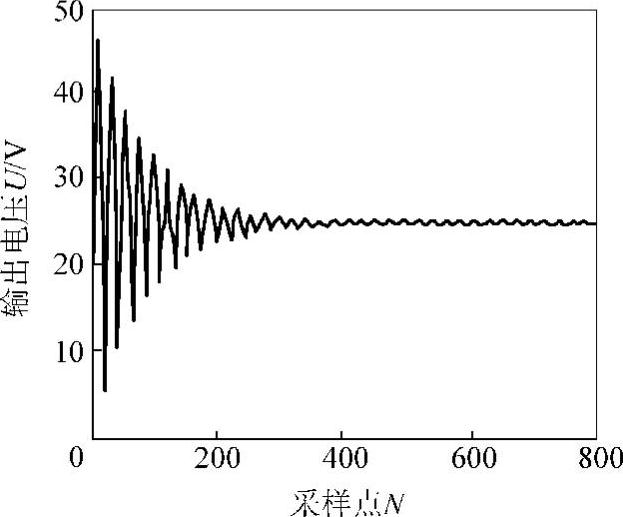
图6-28 d轴控制对象单位阶跃响应波形
被控对象的单位阶跃响应a(t)一般是比较容易通过现场测试获得的。选用适当的采样频率对控制对象的单位阶跃响应曲线进行采样,即可得到系统的单位阶跃响应序列{ai}(i=1,2,…)。为了方便应用,用延时算子q-1将其表示为

对于线性渐进稳定系统,单位阶跃响应序列最终会随着时间趋于常值,即阶跃响应的稳态值a∝。因此总能找到一个整数N,使得N项后面的各项都近似相等。令aN=aN+i=a∝,于是系统的单位阶跃响应序列模型就可以表示为
 (https://www.daowen.com)
(https://www.daowen.com)
变流器控制中,k时刻所需的控制增量为

波形库控制方法就是这样利用控制对象的单位阶跃响应采样值{ai}来完成对系统的控制的。定义{ai}为波形库。系统控制结构如图6-29所示。按照针对线性控制对象的波形库设计方法进行控制器设计,将设计好的控制器应用到两相旋转坐标系中实现三相变流器的控制。

图6-29 波形库控制原理框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





