双自由度(2-DOF)PI控制的概念是I.M.Horotiwz在1963年提出的,并在实际应用中获得了良好的效果。所谓双自由度PI控制,就是使目标值跟踪特性为最优的PI参数和使外扰抑制特性为最优的PI参数能分别独立地进行整定,使两种特性同时达到最优的PI控制技术。双自由度PI控制器并不是由两个独立的PI控制器组成的,但它能独立地设定两组PI参数,使目标值跟踪特性和干扰抑制特性同时达到最佳。传统的PI控制系统可以称为一自由度PI控制系统,其控制结构图如图6-22所示。其中,R(s)为目标值给定输入,N(s)为系统扰动,Y(s)为系统输出,D(s)为控制器的传递函数,G(s)为被控对象的传递函数。对于该系统,可以得到针对扰动输入和给定输入的两个闭环传递函数Gyd(s)和Gyr(s):
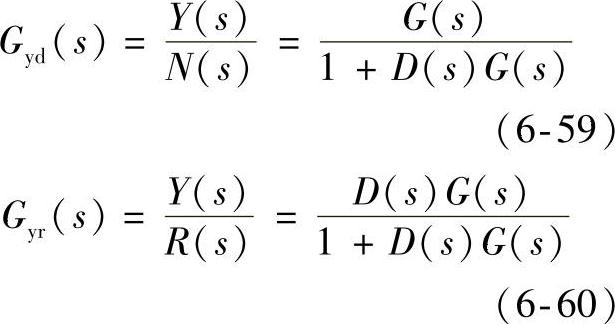
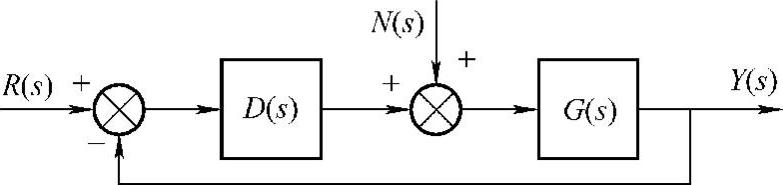
图6-22 一自由度PI控制系统结构图
由于被控对象的传递函数G(s)是不可改变的,Gyd(s)和Gyr(s)是由控制器传递函数D(s)决定的,因此,代表系统抗扰性能的Gyd(s)和代表系统跟踪性能的Gyr(s)是由一组控制参数决定的,不能独立地进行优化设计,所以称为一自由度PI控制。通常系统的抗扰性能和跟踪性能对控制器参数的要求是相互矛盾的,需要对两种性能的要求折衷处理。因此,一自由度PI控制系统难以保证抗扰性能和跟踪性能同时达到最优化。
双自由度PI控制可以克服传统PI控制的上述缺点。双自由度PI控制系统最常用的有目标值滤波器型、目标值前馈型、反馈补偿型和回路补偿型4种类型,如图6-23所示。其中R(s)为给定目标值、D(s)为主控制器、N(s)为外部扰动、G(s)为被控对象、F(s)为目标值滤波器。
在实际应用中需要考虑双自由度化应该结构简单、容易实现和与传统PI控制的结合性。目标值滤波器型是在原有系统上增加目标值滤波器构成的双自由度PI控制系统,具有结构简单,在现有系统上容易实现的特点。
如采用目标值滤波器型双自由度PI控制,其结构框图如图6-23所示。该系统的输出传递函数为

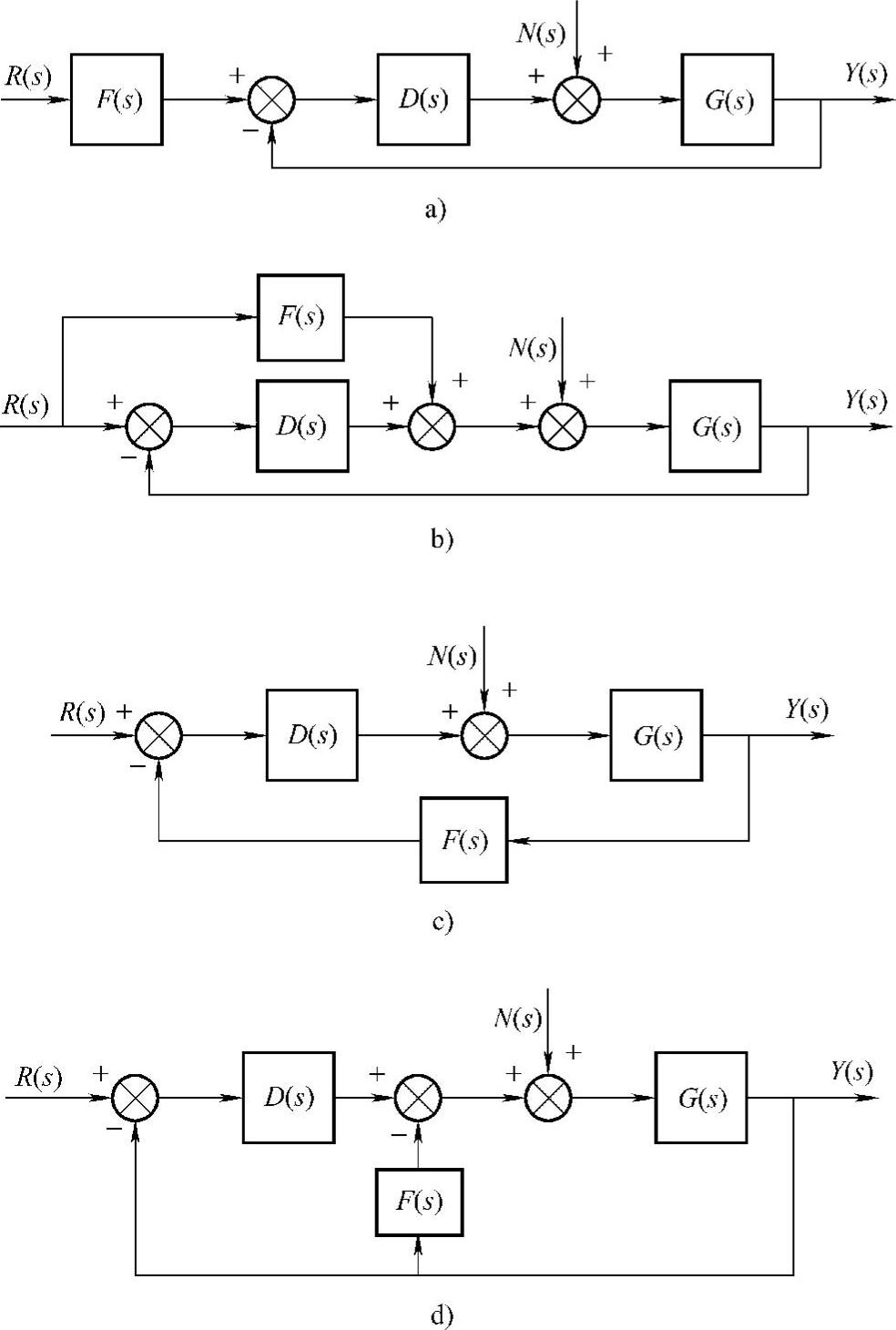
图6-23 双自由度控制系统的典型结构
a)目标值滤波器型 b)目标值前馈型 c)回路补偿型 d)反馈补偿型
式(6-61)由两项组成,第一项是代表跟踪性能的目标值产生的分量,第二项是代表抗扰性能的外部扰动产生的分量。显然,抗扰性能完全由控制器D(s)决定,而跟踪性能是由控制器D(s)和目标值滤波器F(s)共同决定。因此,可以根据系统对抗扰性能的要求设计控制器参数,根据系统跟踪性能指标设计目标值滤波器参数。与图6-22所示的系统相比,该系统的抗扰性能和跟踪性能是由两组独立的控制参数分别决定的,所以称为双自由度控制系统。
系统的抗扰性能完全由控制器D(s)决定,而跟随性能是由控制器D(s)和目标值滤波器F(s)共同决定。因此,可以根据逆变系统对抗扰性能指标的要求,首先确定PI控制器的参数KP和τ。在D(s)确定后,可以通过设计目标值滤波器F(s)来改善系统的跟随性能。
在原有PI控制器的基础上施加目标值滤波器,其综合控制算法为(https://www.daowen.com)

式中 α——Kp的双自由度化系数;
β——τ的双自由度化系数。
目标值滤波器的结构为

由式(6-63)可知

上式表明,稳态时目标值滤波器的输入输出相等,该滤波器的引入并不会改变系统的稳态输出。
根据前面介绍的PI控制器传递函数和采用的目标值滤波器传递函数,可以得到双自由度PI控制结构框图如图6-24所示,PI控制器D(s)的主要作用是改善逆变器的抗扰性能。由于典型Ⅱ型系统具有较好的抗扰性能,可以将逆变系统设计为典型Ⅱ型系统。
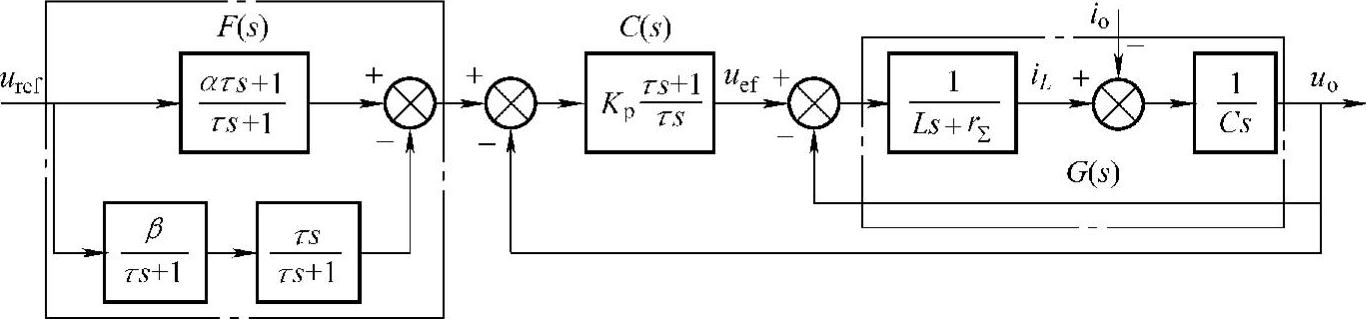
图6-24 目标值滤波器型双自由度PI控制逆变系统框图
对于双自由度PI控制系统,根据系统抗扰性能的要求确定KP和τ之后,调整双自由度化系数α和β,使系统的跟随性能满足要求。如果确定了系统的最佳抗扰性能的比例增益Kp和最佳跟随性能的比例增益Kp*,则双自由度化系数α可确定为
α=Kp*/Kp(6-65)
而β需要采用仿真或实验的方法确定。在实际应用中,可以根据工业推荐值来确定双自由度化系数:α=0.4,β=0.15。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





