Step1.新建文件。新建一个装配模型,命名为shaper_asm,选取 模板。
模板。
Step2.引入第一个元件body.prt,并使用 约束完全约束该元件。
约束完全约束该元件。
Step3.引入电动机子组件motor_asm.asm,并将其调整到图9.6.14所示的位置。
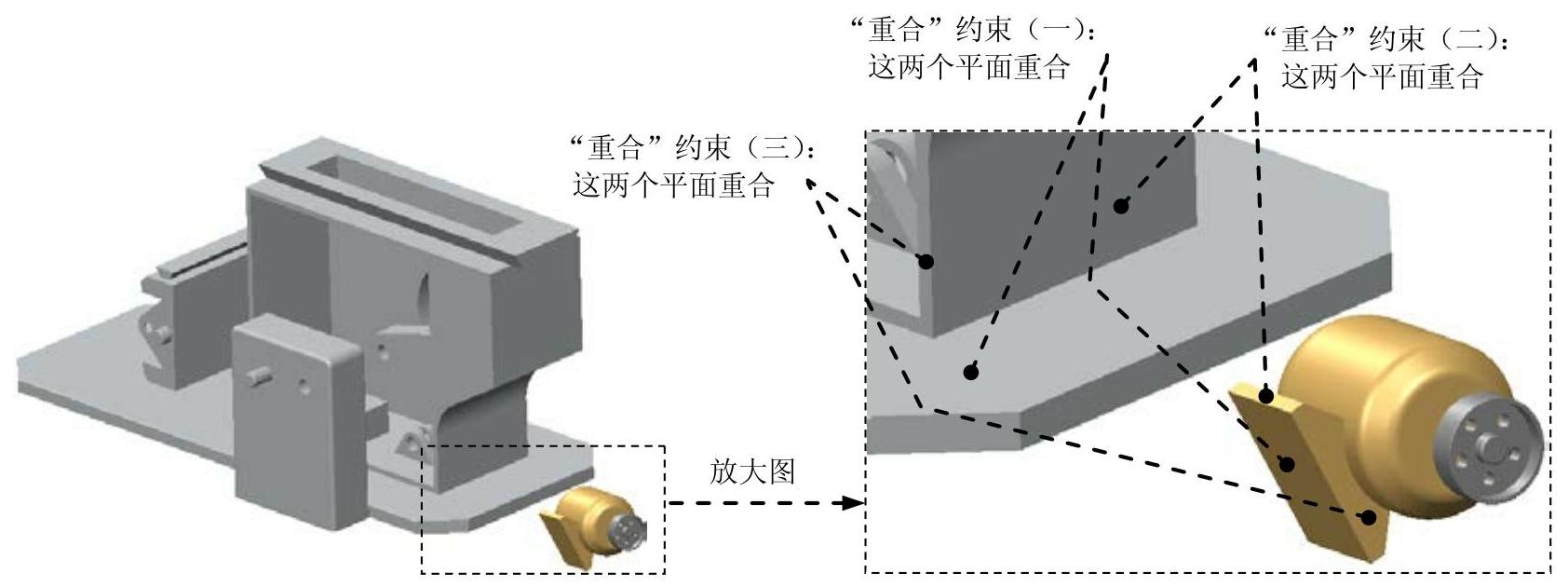
图9.6.14 创建刚性(Rigid)连接
Step4.创建body和motor_asm之间的刚性连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“重合”约束(一)。在 下拉列表中选择
下拉列表中选择 选项,选取图9.6.14所示的两个平面为“重合”约束(一)的参考,此时
选项,选取图9.6.14所示的两个平面为“重合”约束(一)的参考,此时 界面如图9.6.15所示。
界面如图9.6.15所示。
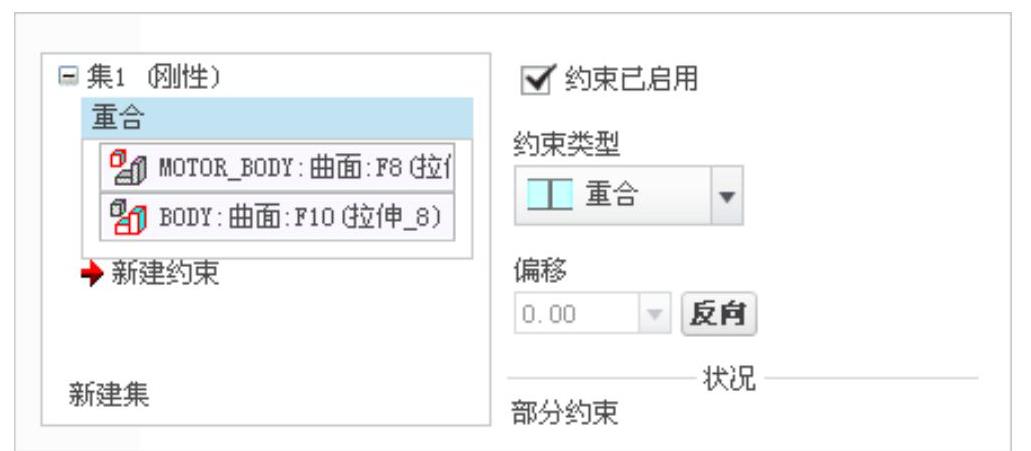
图9.6.15 “放置”界面
(3)定义“重合”约束(二)。在 界面中单击
界面中单击 ,在
,在 下拉列表中选择
下拉列表中选择 选项,选取图9.6.14中的两个平面为“重合”约束(二)的参考,此时
选项,选取图9.6.14中的两个平面为“重合”约束(二)的参考,此时 界面如图9.6.16所示。
界面如图9.6.16所示。
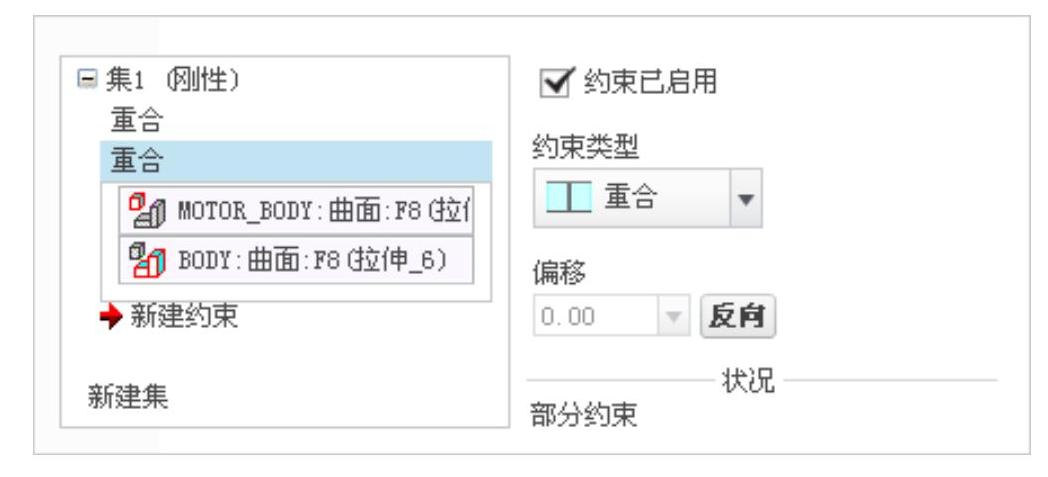
图9.6.16 “放置”界面
(4)定义“重合”约束(三)。参考步骤(3)选取图9.6.14中的两个平面为“重合”约束(三)的参考,此时 界面如图9.6.17所示。
界面如图9.6.17所示。
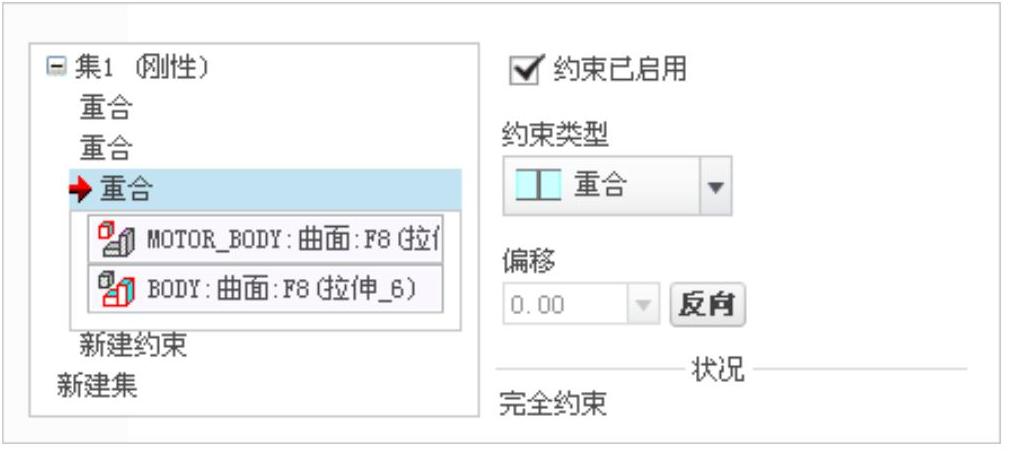
图9.6.17 放置界面
(5)单击操控板中的 按钮,完成刚性连接的创建,如图9.6.18所示
按钮,完成刚性连接的创建,如图9.6.18所示
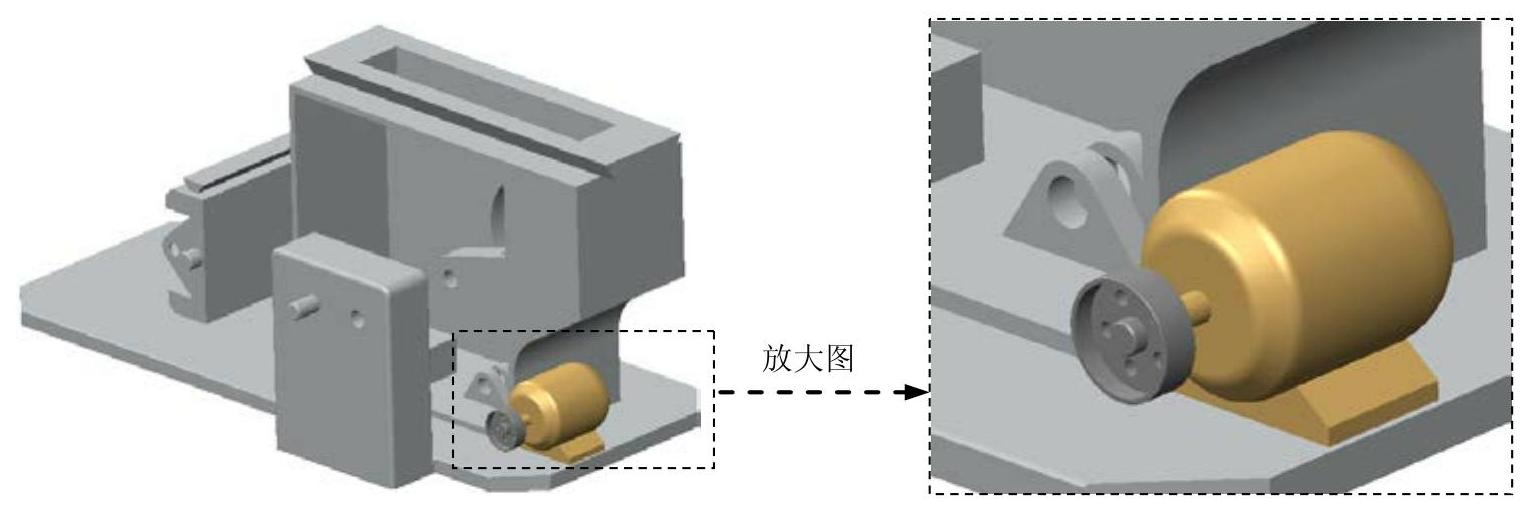
图9.6.18 完成连接
Step5.引入元件coupling_wheel.prt,并将其调整到图9.6.19所示的位置。
Step6.创建coupling_wheel和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.19中的两个柱面为“轴对齐”约束参考,如图9.6.20所示。
按钮,分别选取图9.6.19中的两个柱面为“轴对齐”约束参考,如图9.6.20所示。
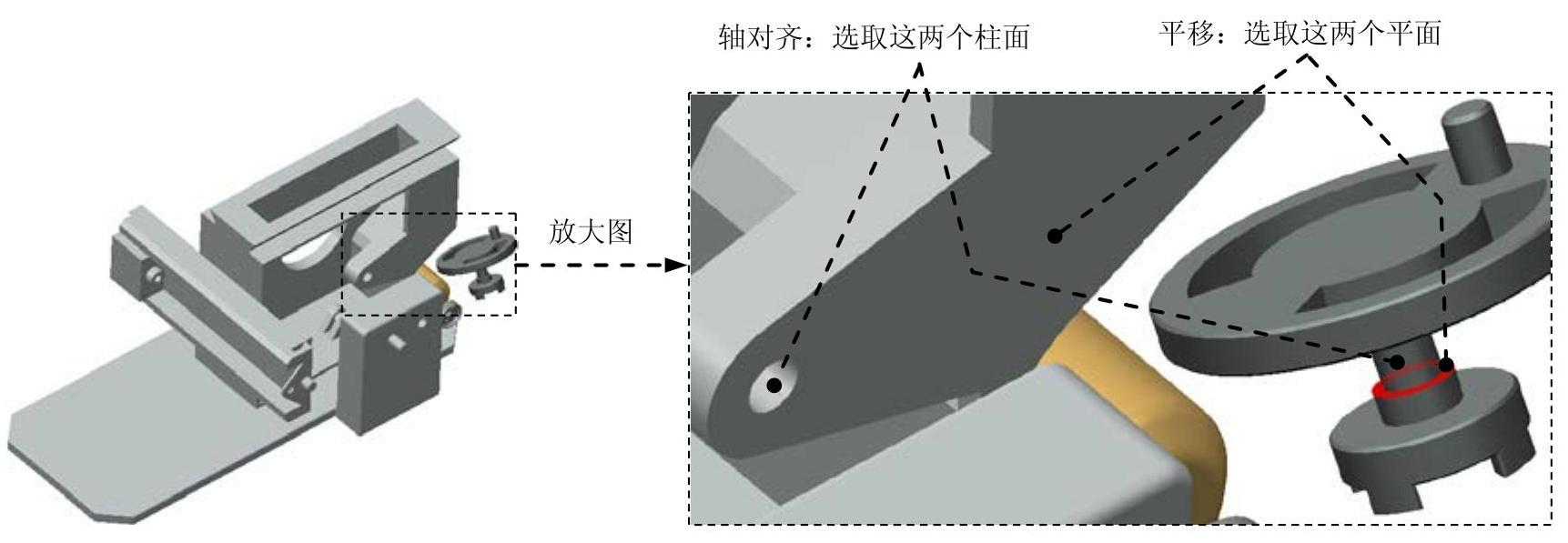
图9.6.19 创建“销(Pin)”连接
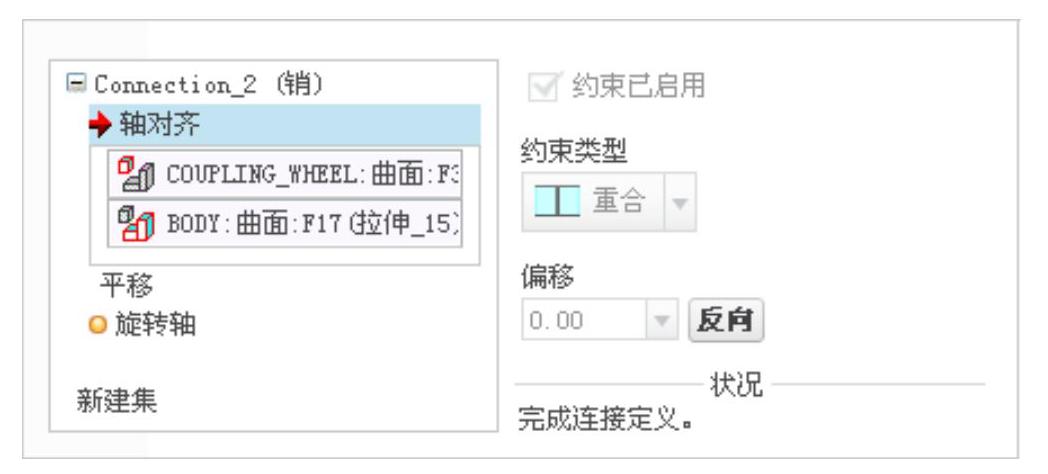
图9.6.20 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.19中的两个平面为“平移”约束的参考,如图9.6.21所示。
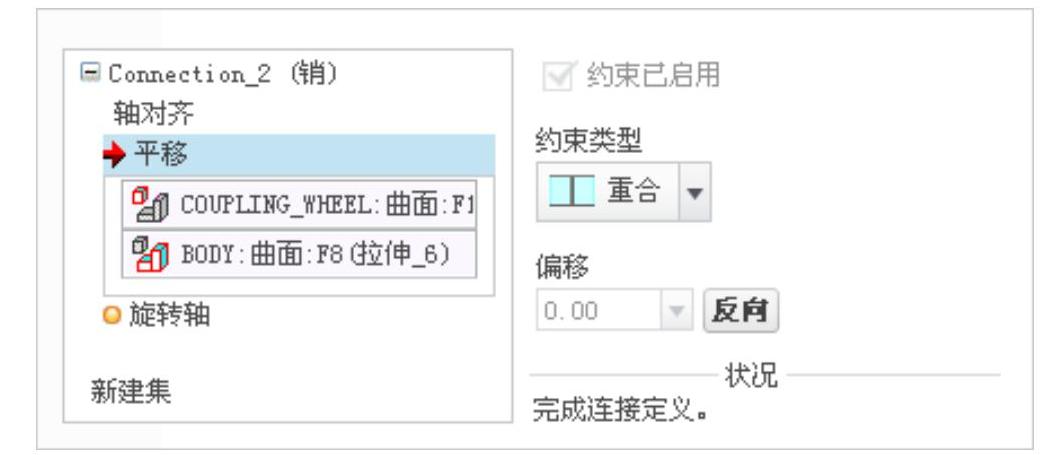
图9.6.21 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,选取coupling_wheel中的基准平面DTM3和body中的基准平面DTM2为旋转轴参考。
选项,选取coupling_wheel中的基准平面DTM3和body中的基准平面DTM2为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值0,并按Enter键确认,然后单击
区域下的文本框中输入值0,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.6.22所示。
复选框,如图9.6.22所示。
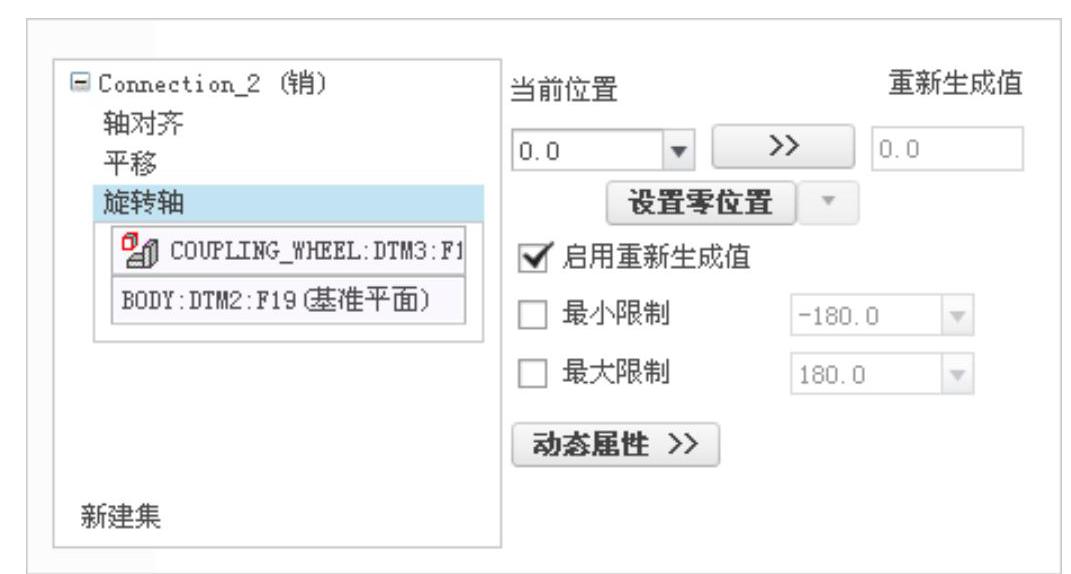
图9.6.22 设置位置参数
(6)单击操控板中的 按钮,完成连接的创建,如图9.6.23所示
按钮,完成连接的创建,如图9.6.23所示
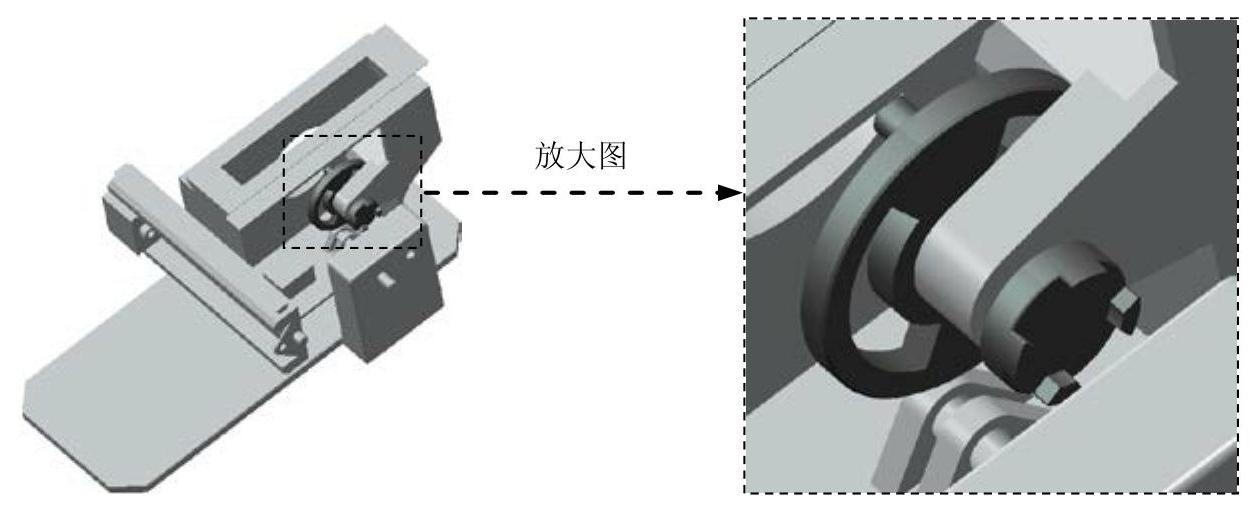
图9.6.23 完成连接的创建
Step7.引入元件coupling_gear.prt,并将其调整到图9.6.24所示的位置。
Step8.创建coupling_gear和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.24中的两个柱面为“轴对齐”约束参考,如图9.6.25所示。
按钮,分别选取图9.6.24中的两个柱面为“轴对齐”约束参考,如图9.6.25所示。
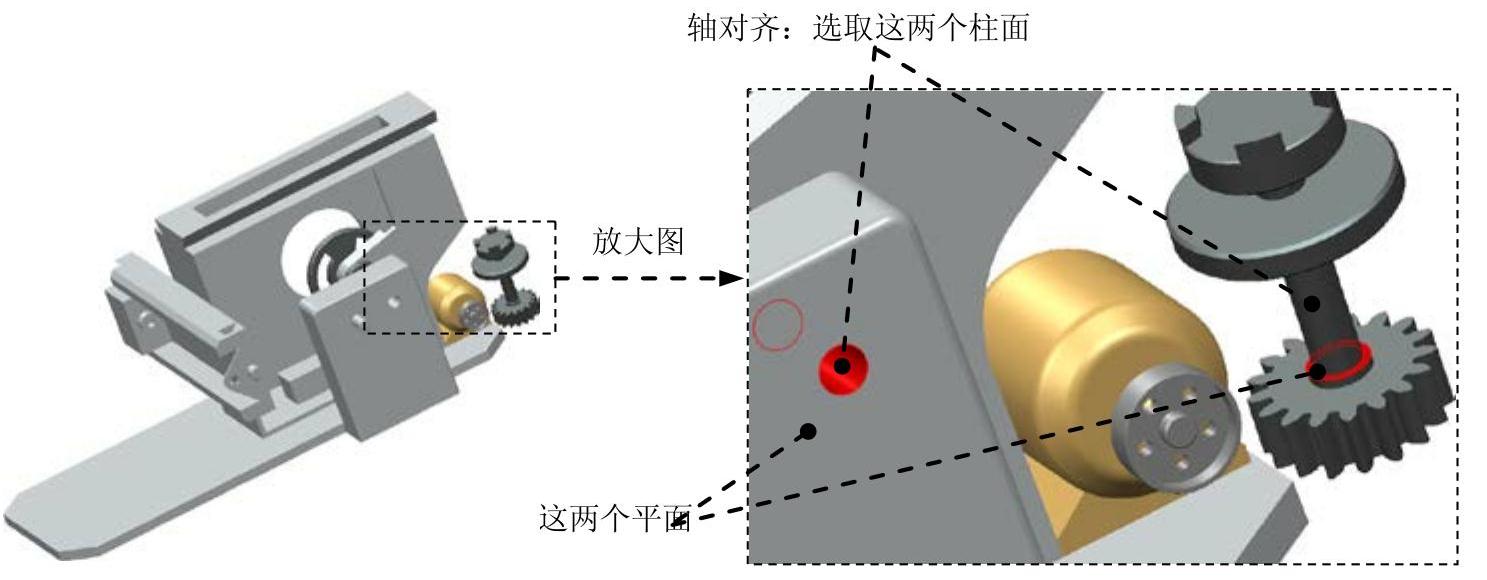
图9.6.24 创建“销(Pin)”连接
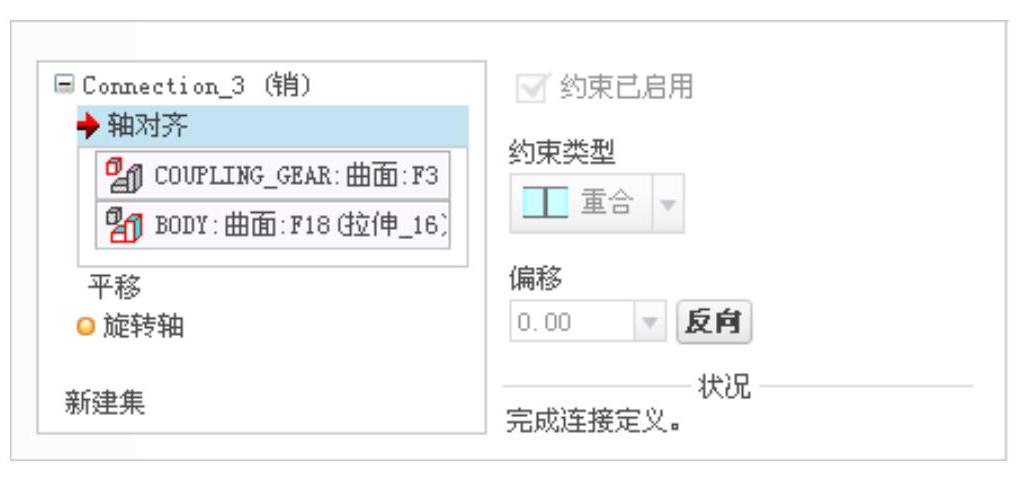
图9.6.25 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.24中的两个平面为“平移”约束的参考,如图9.6.26所示。
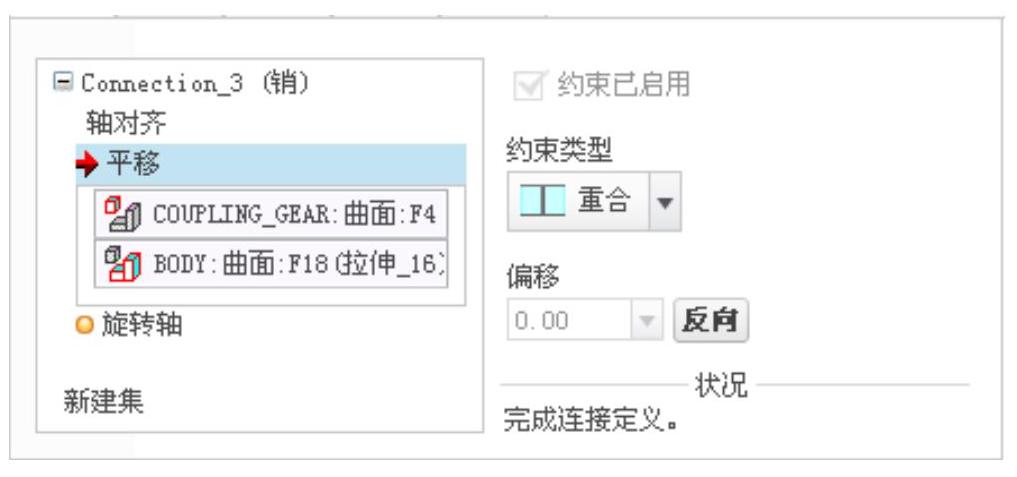
图9.6.26 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,选取coupling_wheel中的基准平面DTM4和body中的基准平面DTM2为旋转轴参考。
选项,选取coupling_wheel中的基准平面DTM4和body中的基准平面DTM2为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧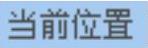 区域下的文本框中输入值0,并按Enter键确认,然后单击
区域下的文本框中输入值0,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.6.27所示。
复选框,如图9.6.27所示。
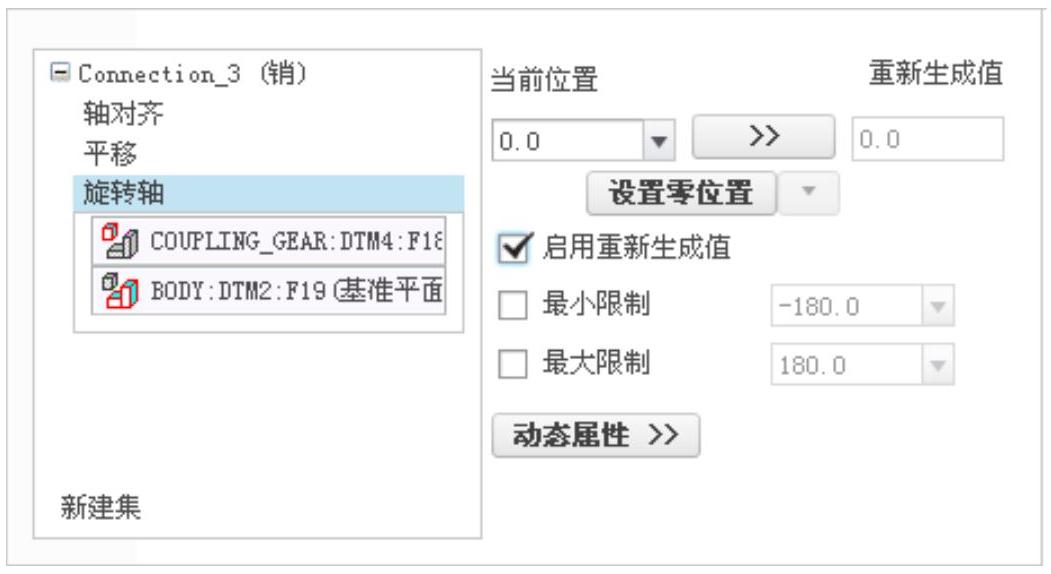
图9.6.27 设置位置参数
(6)单击操控板中的 按钮,完成连接的创建,如图9.6.28所示。
按钮,完成连接的创建,如图9.6.28所示。
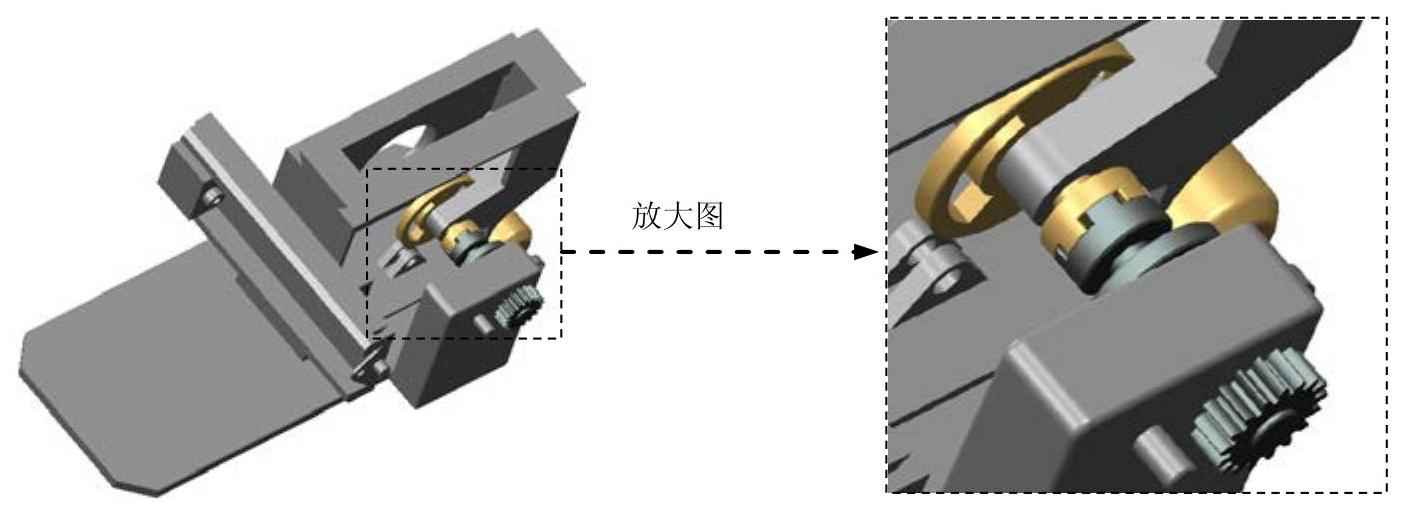
图9.6.28 完成连接的创建
Step9.引入元件spline.prt,并将其调整到图9.6.29所示的位置。
图9.6.29 创建圆柱(Cylinder)连接
Step10.创建spline和body之间的圆柱连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.6.29所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.6.30所示。
界面如图9.6.30所示。
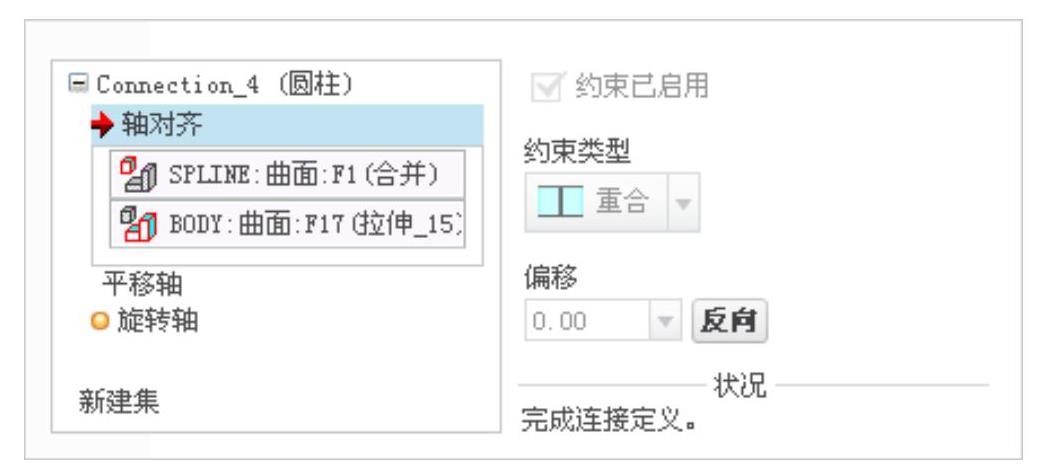
图9.6.30 “放置”界面
(3)设置平移轴参考。在 界面中单击
界面中单击 选项,选取图9.6.29所示的两个平面为平移轴参考。
选项,选取图9.6.29所示的两个平面为平移轴参考。
(4)设置平移轴位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值63(如果方向相反则为负值),并按Enter键确认;单击
区域下的文本框中输入值63(如果方向相反则为负值),并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,此时
复选框,此时 界面如图9.6.31所示。
界面如图9.6.31所示。
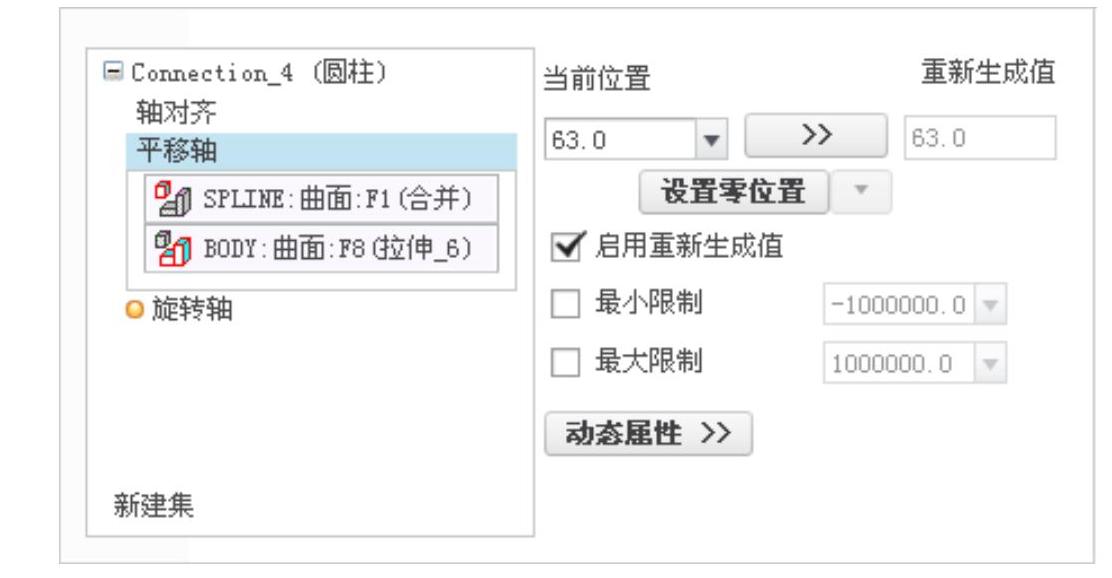
图9.6.31 “放置”界面
(5)设置旋转轴参考。在 界面中单击
界面中单击 选项,在模型树中选取spline中的基准平面DTM1和body中的基准平面DTM2为旋转轴参考。
选项,在模型树中选取spline中的基准平面DTM1和body中的基准平面DTM2为旋转轴参考。
(6)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值0,并按Enter键确认;单击
区域下的文本框中输入值0,并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,此时
复选框,此时 界面9.6.32所示。
界面9.6.32所示。
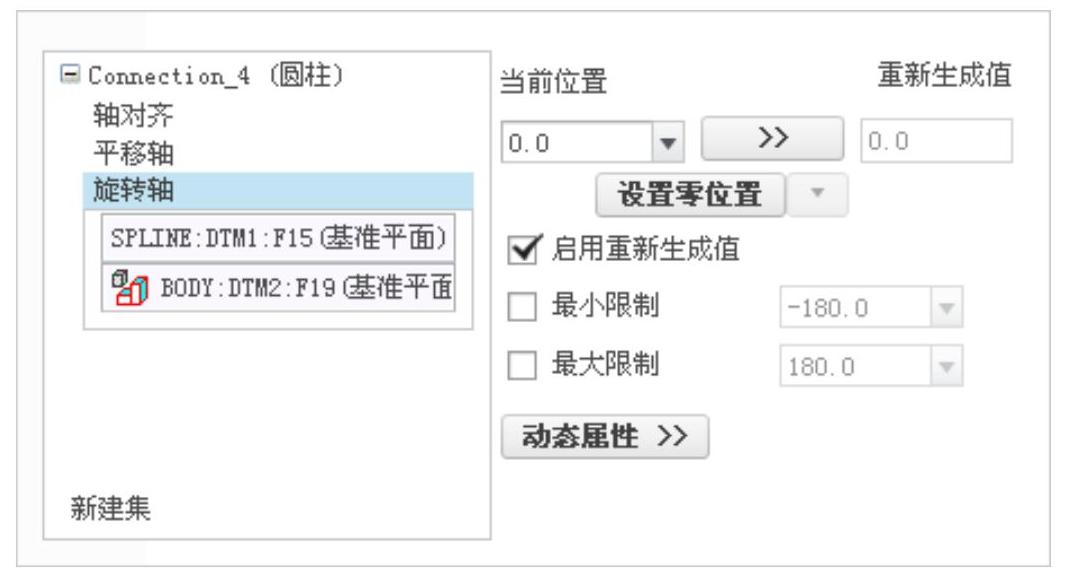
图9.6.32 “放置”界面
(7)单击操控板中的 按钮,完成圆柱连接的创建。
按钮,完成圆柱连接的创建。
Step11.引入元件bar.prt,并将其调整到图9.6.33所示的位置(在模型树中隐藏元件spline、coupling_wheel和coupling_gear)。
Step12.创建bar和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.33中的两个柱面为“轴对齐”约束参考,如图9.6.34所示。
按钮,分别选取图9.6.33中的两个柱面为“轴对齐”约束参考,如图9.6.34所示。
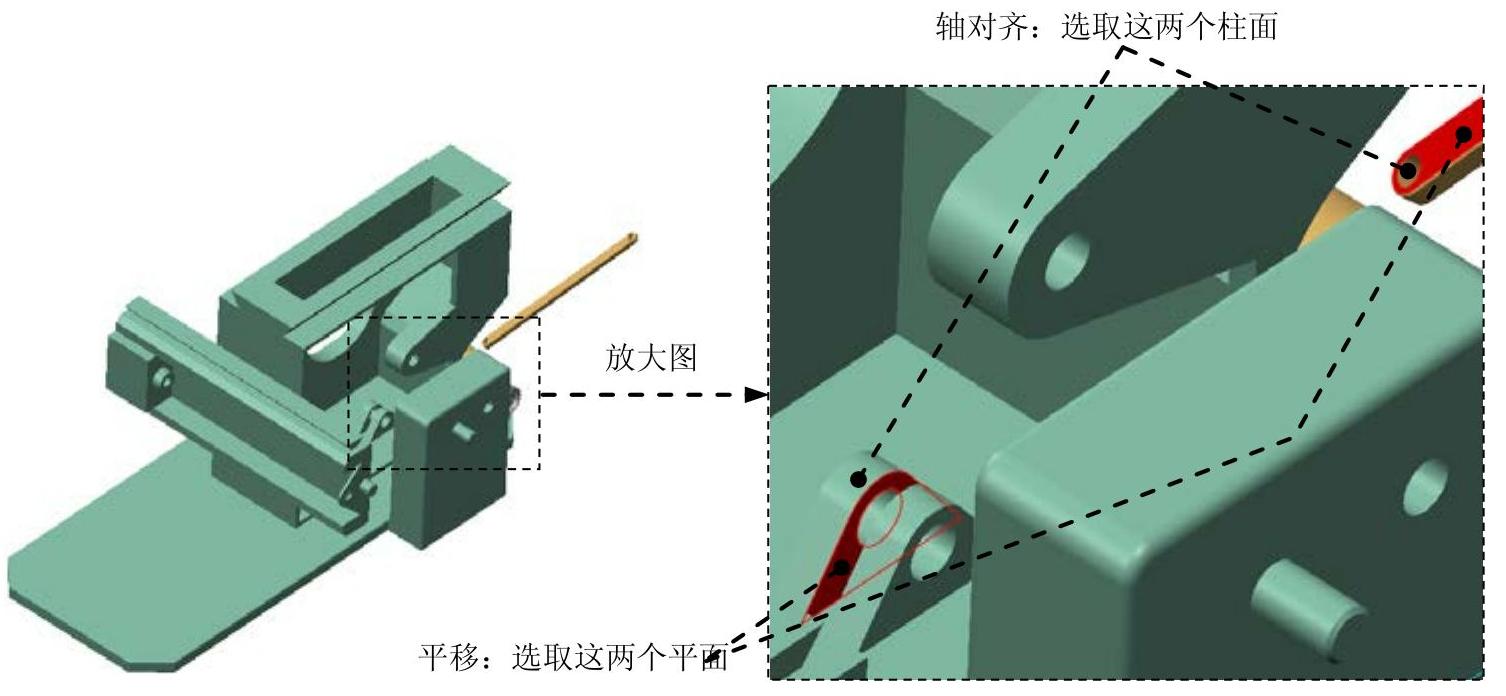
图9.6.33 创建“销(Pin)”连接
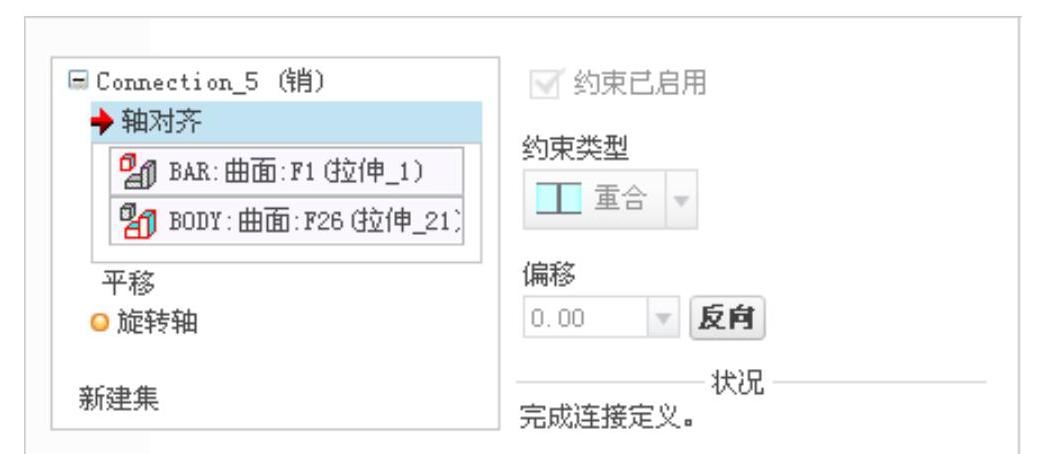
图9.6.34 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.33中的两个平面为“平移”约束的参考,如图9.6.35所示。
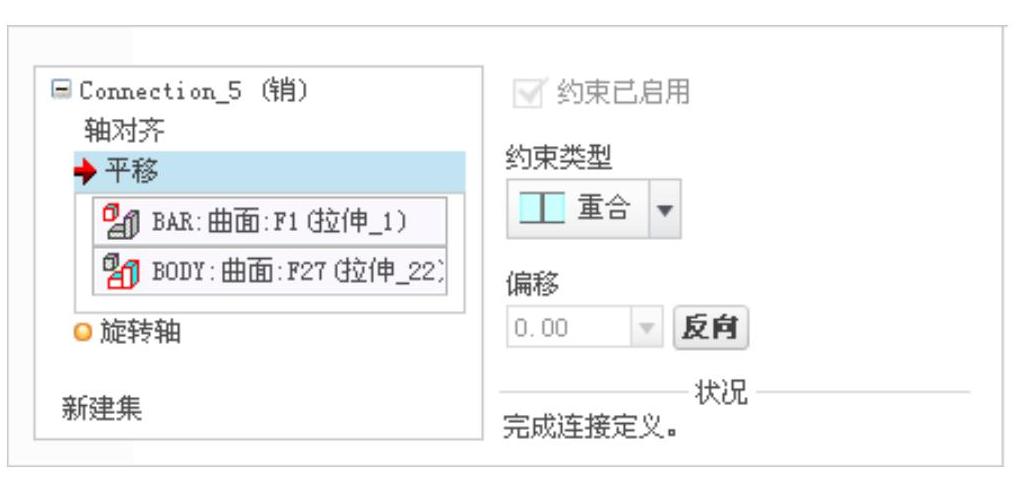
图9.6.35 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,选取bar中的基准平面DTM1和body中的基准平面DTM2为旋转轴参考。
选项,选取bar中的基准平面DTM1和body中的基准平面DTM2为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值0,并按Enter键确认,然后单击
区域下的文本框中输入值0,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.6.36所示。
复选框,如图9.6.36所示。
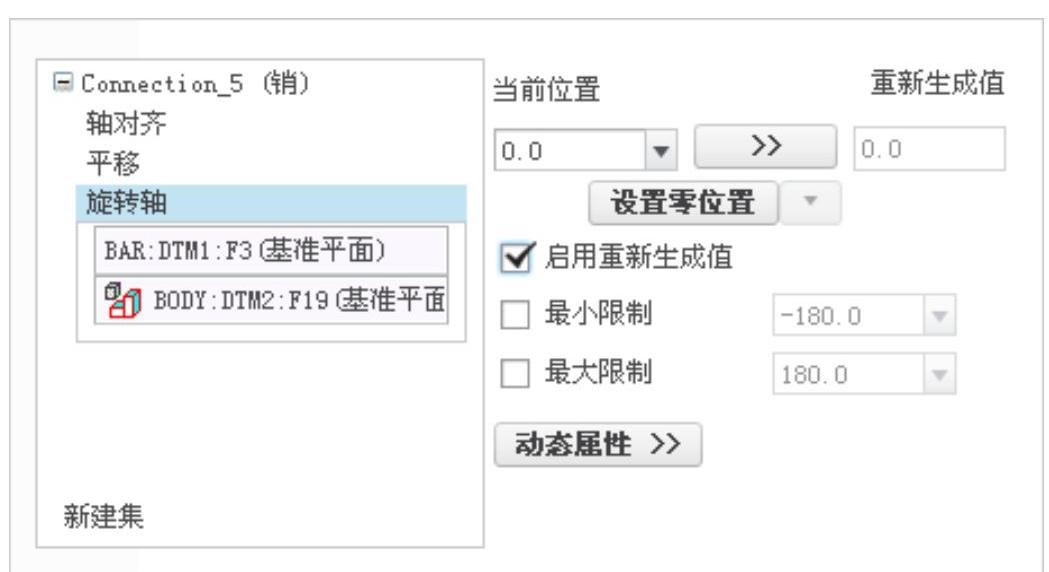
图9.6.36 设置位置参数
(6)单击操控板中的 按钮,完成连接的创建,如图9.6.37所示
按钮,完成连接的创建,如图9.6.37所示
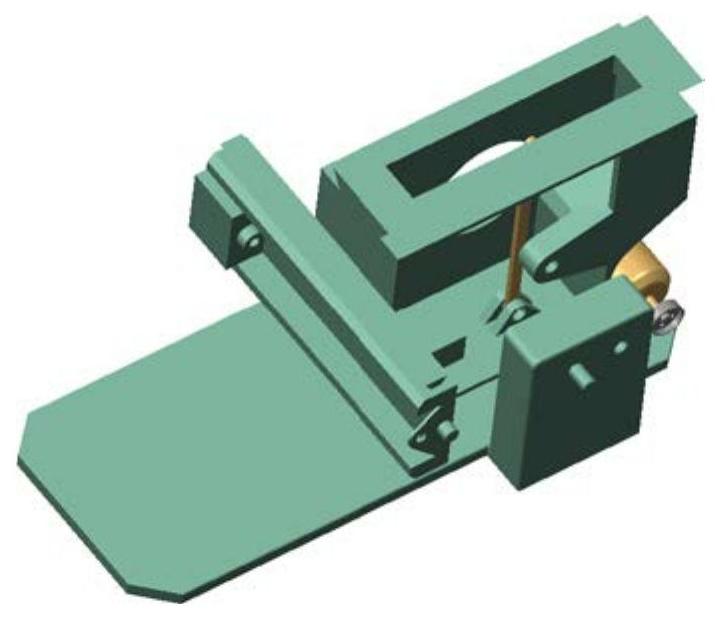
图9.6.37 完成连接的创建
Step13.引入元件slider.prt,并将其调整到图9.6.38所示的位置(在模型树中隐藏元件body和motor_asm,取消隐藏元件spline、coupling_wheel和coupling_gear)。
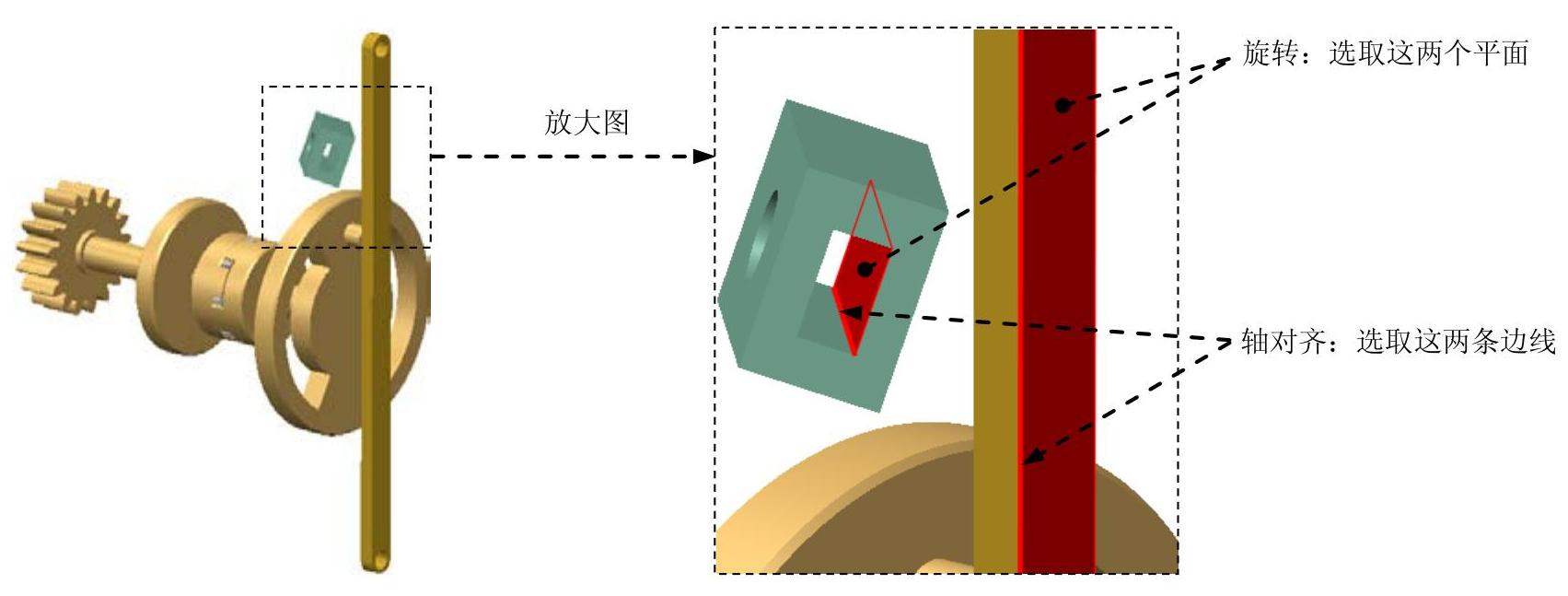
图9.6.38 创建滑块(Slider)连接
Step14.创建slider和bar之间的滑块连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.6.38所示的两条边线为“轴对齐”约束参考,此时 界面如图9.6.39所示。
界面如图9.6.39所示。
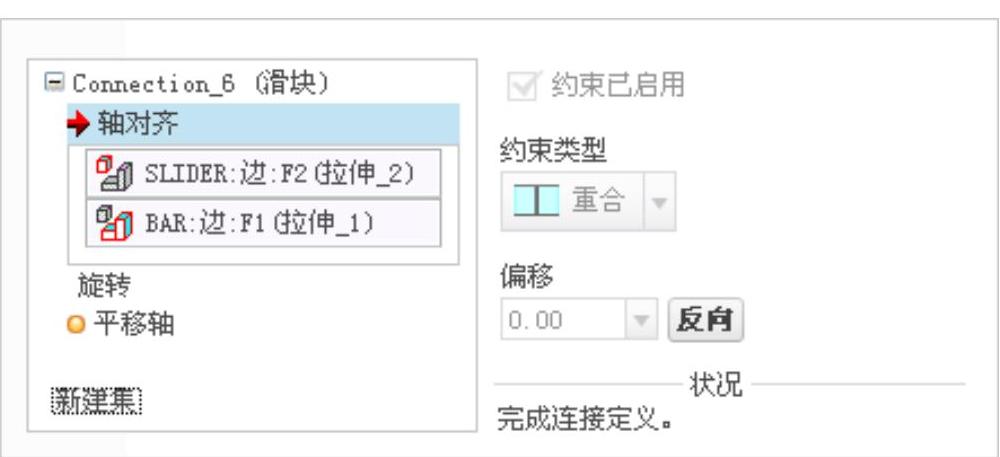
图9.6.39 “放置”界面
(3)定义“旋转”约束。分别选取图9.6.38所示的两个平面为“旋转”约束参考,此时 界面如图9.6.40所示。
界面如图9.6.40所示。
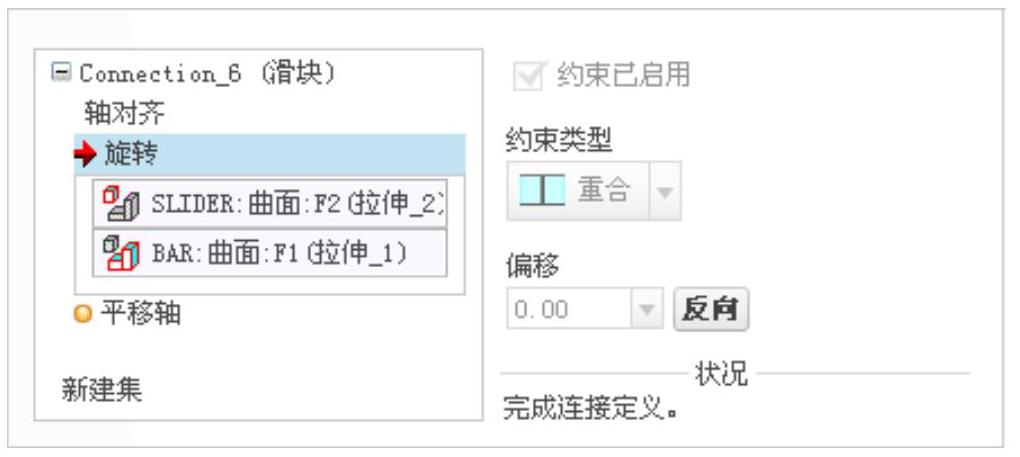
图9.6.40 “放置”界面
Step15.创建slider和coupling_wheel之间的圆柱连接。
(1)在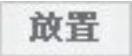 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.41所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.6.41所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.6.42所示。
界面如图9.6.42所示。
图9.6.41 创建圆柱(Cylinder)连接
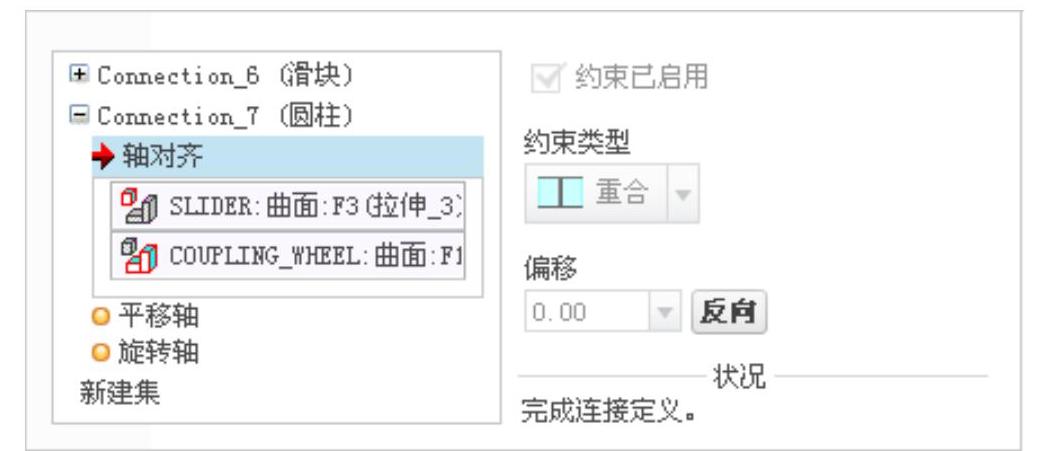
图9.6.42 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step16.引入元件ram.prt,并将其调整到图9.6.43所示的位置(在模型树中取消隐藏元件body)。
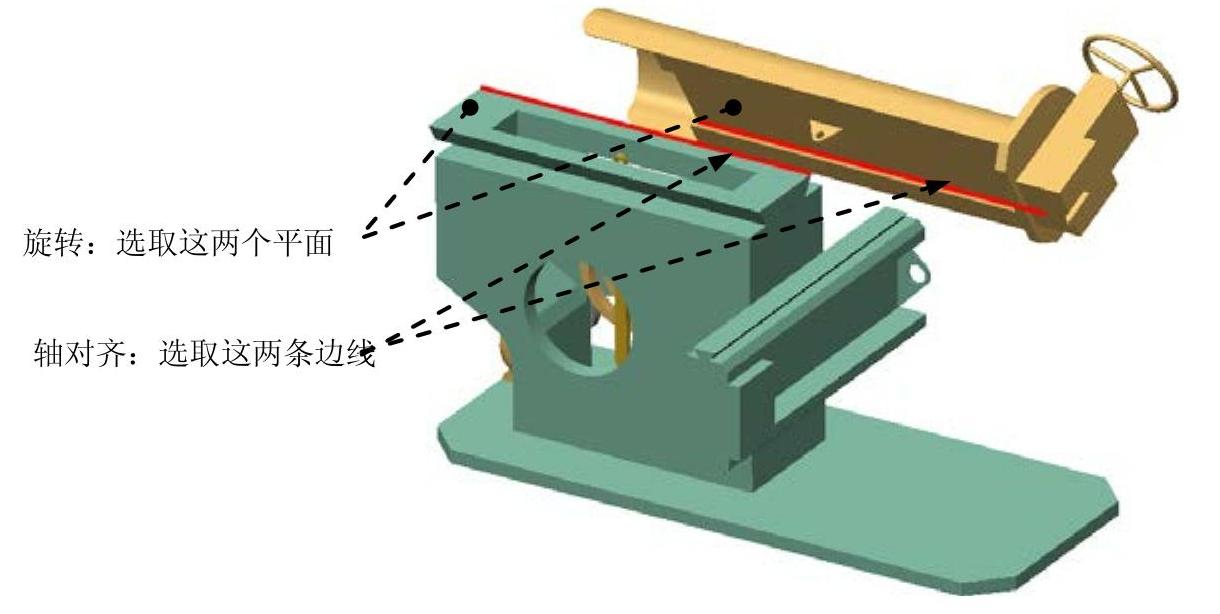
图9.6.43 创建滑块(Slider)连接
Step17.创建ram和body之间的滑块连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.6.43所示的两条边线为“轴对齐”约束参考,此时 界面如图9.6.44所示。
界面如图9.6.44所示。
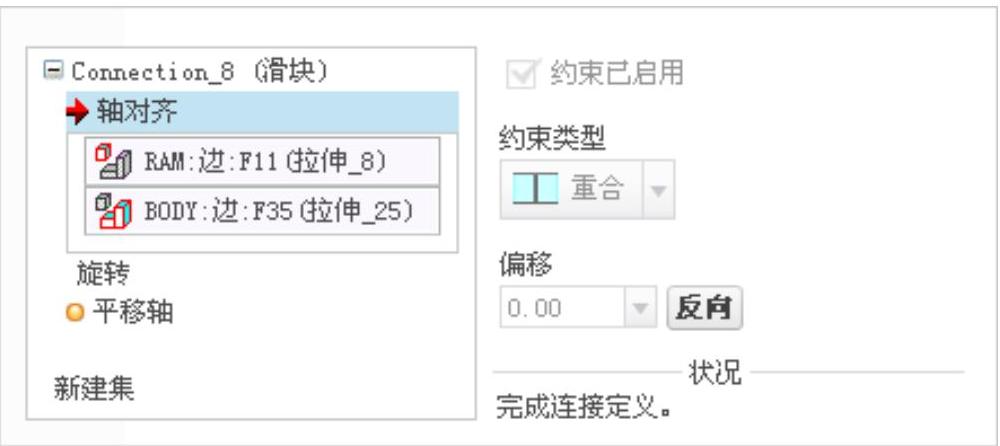
图9.6.44 “放置”界面
(3)定义“旋转”约束。分别选取图9.6.43所示的两个平面为“旋转”约束参考,此时 界面如图9.6.45所示。
界面如图9.6.45所示。
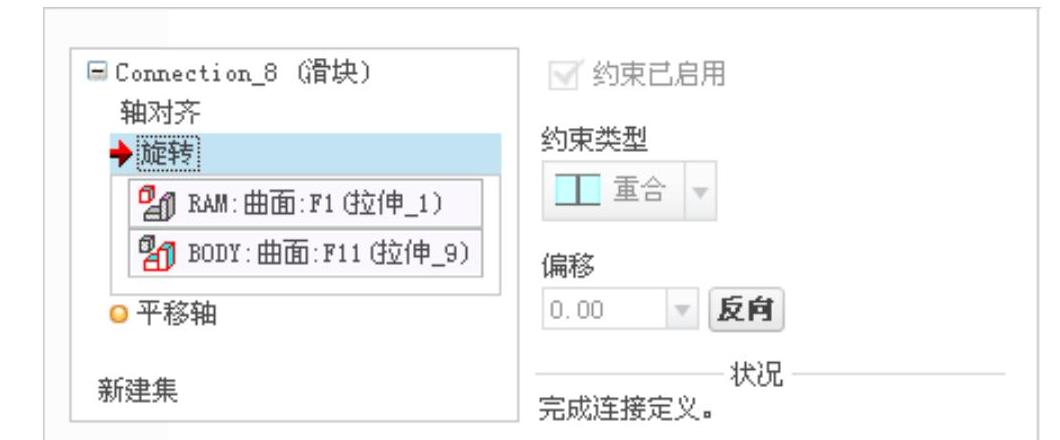
图9.6.45 “放置”界面(www.daowen.com)
(4)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step18.引入元件rod.prt,并将其调整到图9.6.46所示的位置(在模型树中隐藏元件body)。
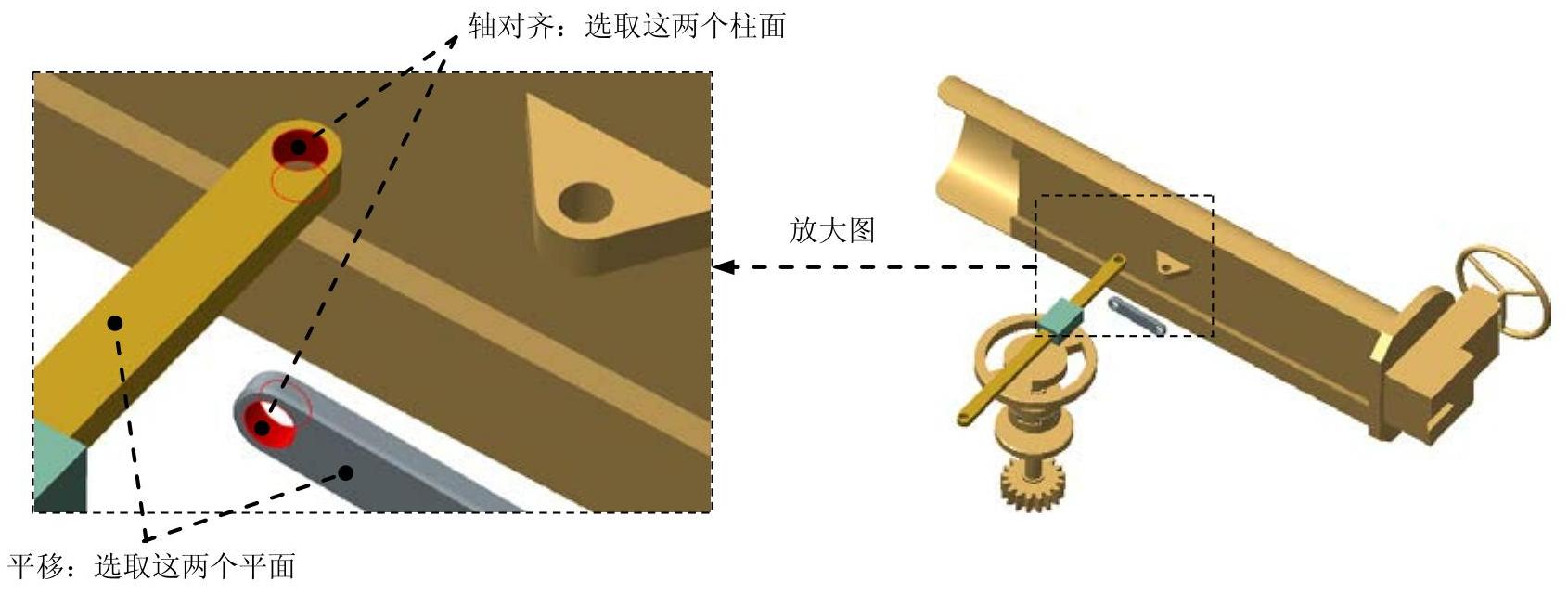
图9.6.46 创建“销(Pin)”连接
Step19.创建rod和bar之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.46中的两个柱面为“轴对齐”约束参考,如图9.6.47所示。
按钮,分别选取图9.6.46中的两个柱面为“轴对齐”约束参考,如图9.6.47所示。
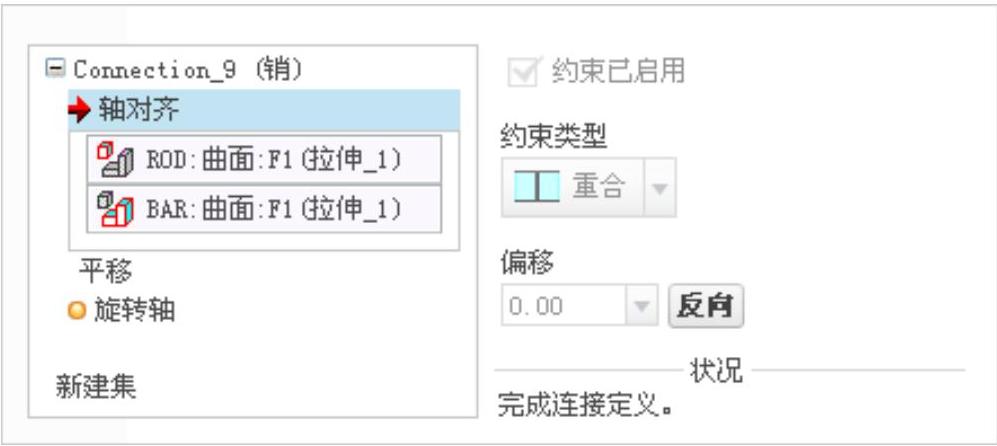
图9.6.47 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.46中的两个平面为“平移”约束的参考,如图9.6.48所示。

图9.6.48 定义“平移”约束
Step20.创建ram和rod之间的圆柱连接。
(1)在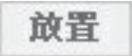 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的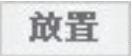 按钮,分别选取图9.6.49所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.6.49所示的两个柱面为“轴对齐”约束参考,此时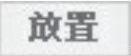 界面如图9.6.50所示。
界面如图9.6.50所示。
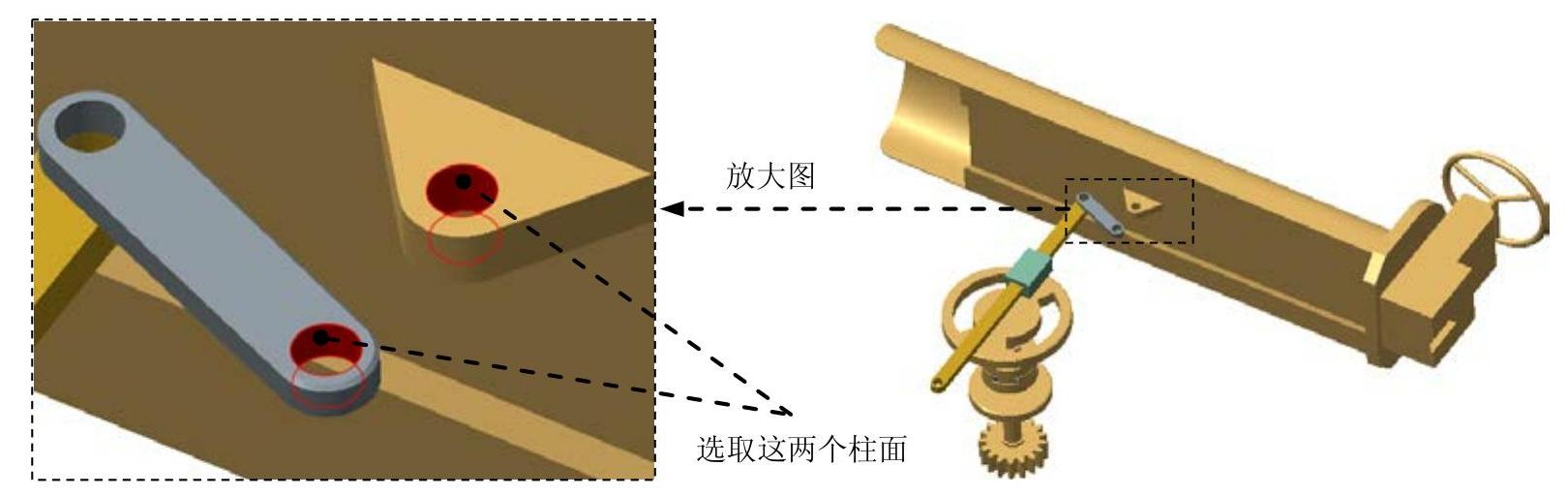
图9.6.49 创建圆柱(Cylinder)连接
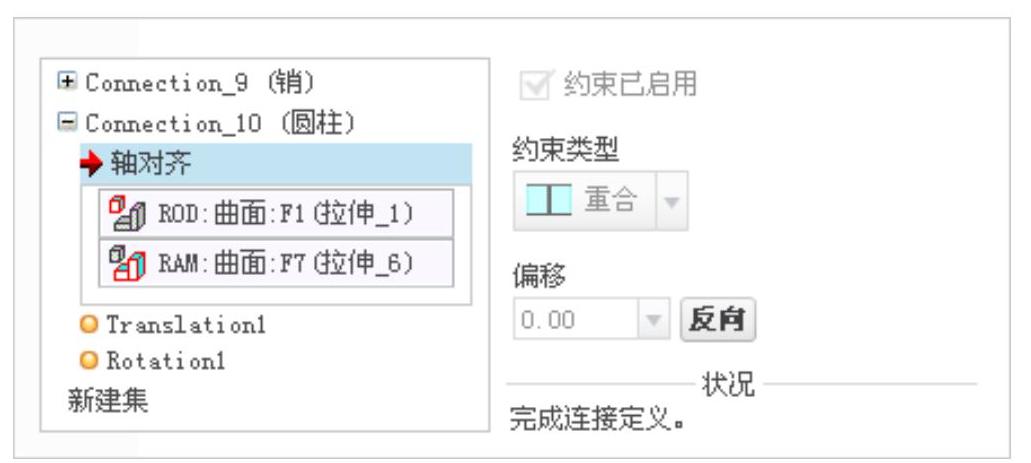
图9.6.50 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建,如图9.6.51所示。
按钮,完成连接的创建,如图9.6.51所示。
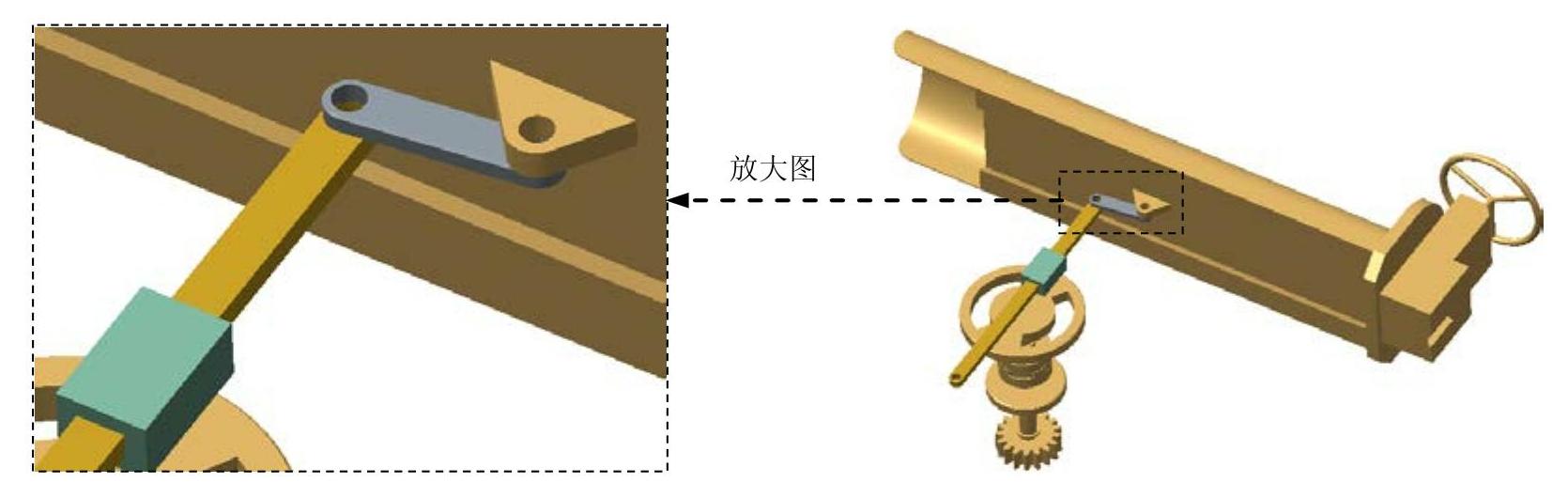
图9.6.51 完成连接的创建
Step21.引入元件gear.prt,并将其调整到图9.6.52所示的位置(在模型树中取消隐藏元件body)。
Step22.创建gear和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.52中的两个柱面为“轴对齐”约束参考,如图9.6.53所示。
按钮,分别选取图9.6.52中的两个柱面为“轴对齐”约束参考,如图9.6.53所示。
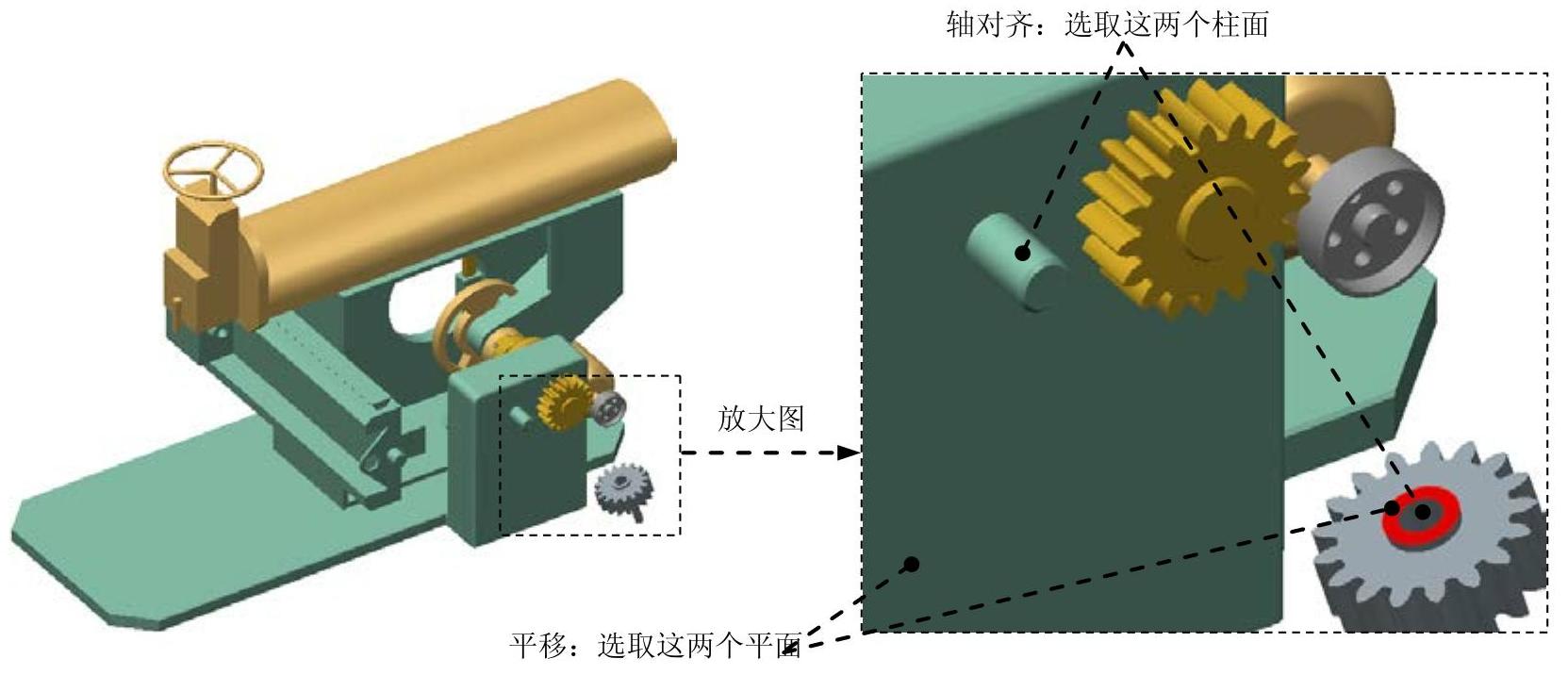
图9.6.52 创建“销(Pin)”连接
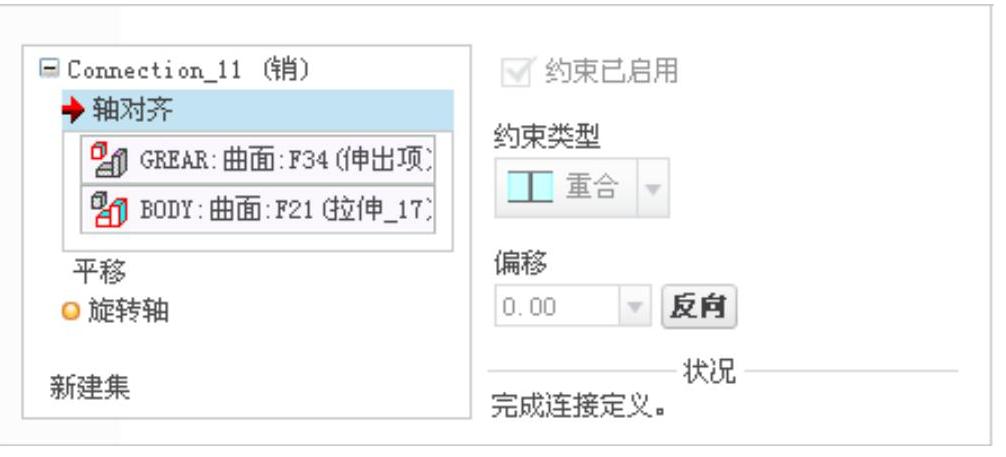
图9.6.53 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.52中的两个平面为“平移”约束的参考,如图9.6.54所示。
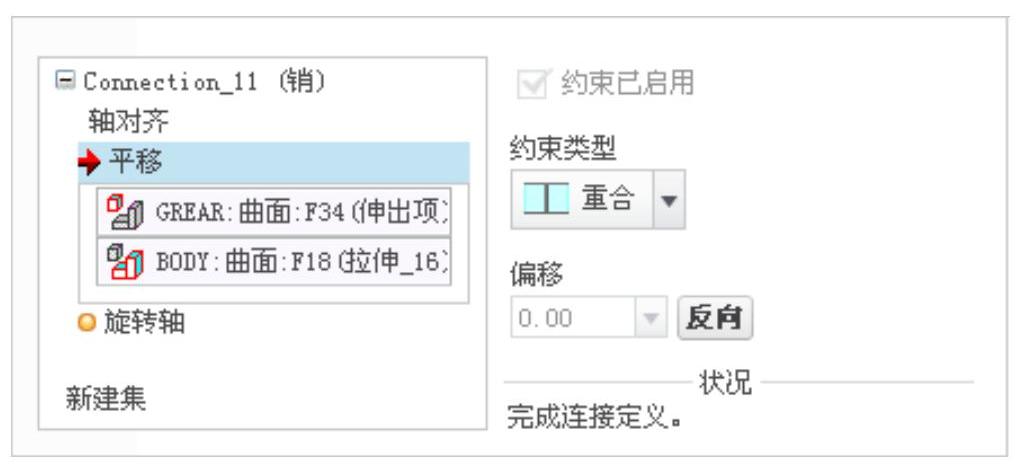
图9.6.54 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,选取gear中的基准平面RHGHT和body中的基准平面DTM2为旋转轴参考。
选项,选取gear中的基准平面RHGHT和body中的基准平面DTM2为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值-5.3,并按Enter键确认,然后单击
区域下的文本框中输入值-5.3,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.6.55所示。
复选框,如图9.6.55所示。
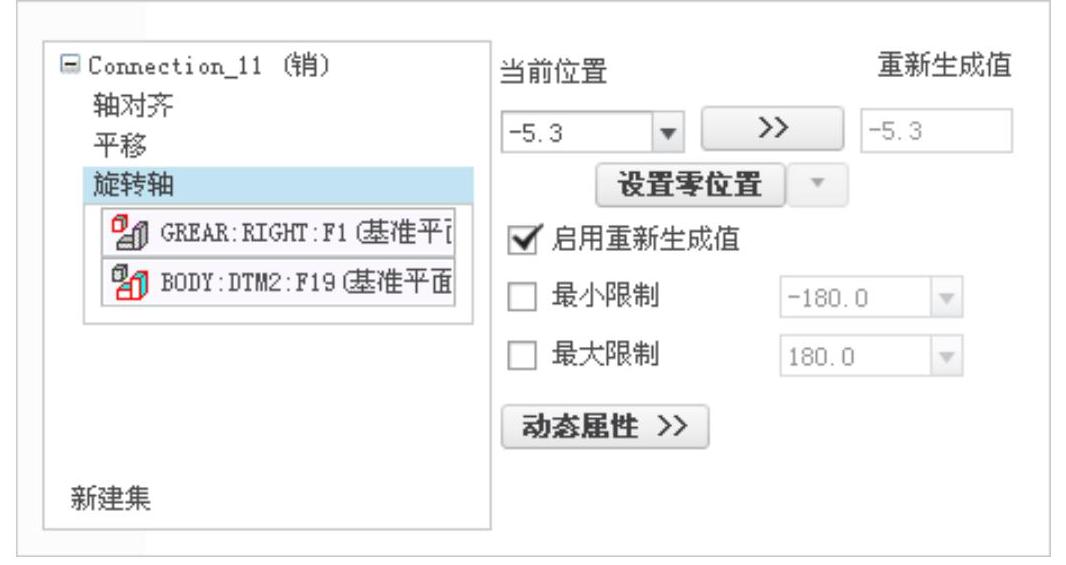
图9.6.55 设置位置参数
(6)单击操控板中的 按钮,完成连接的创建,如图9.6.56所示。
按钮,完成连接的创建,如图9.6.56所示。
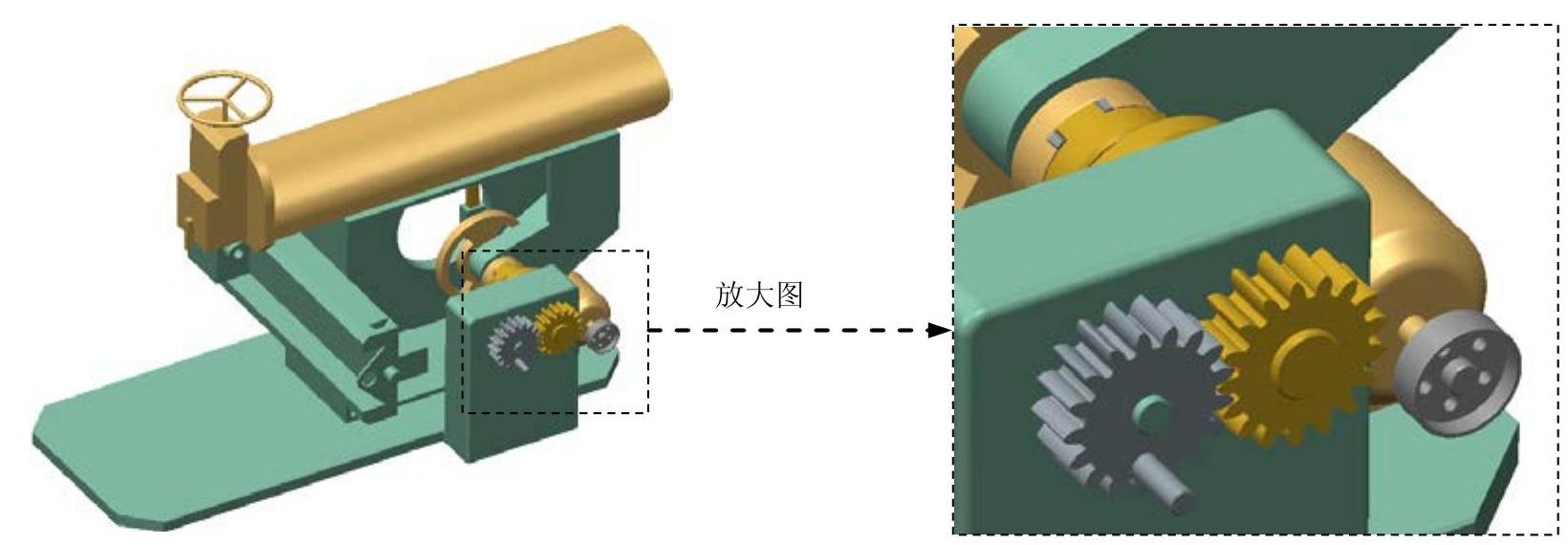
图9.6.56 完成连接的创建
Step23.引入平移机构子组件translation_mech_asm.asm,并将其调整到图9.6.57所示的位置。
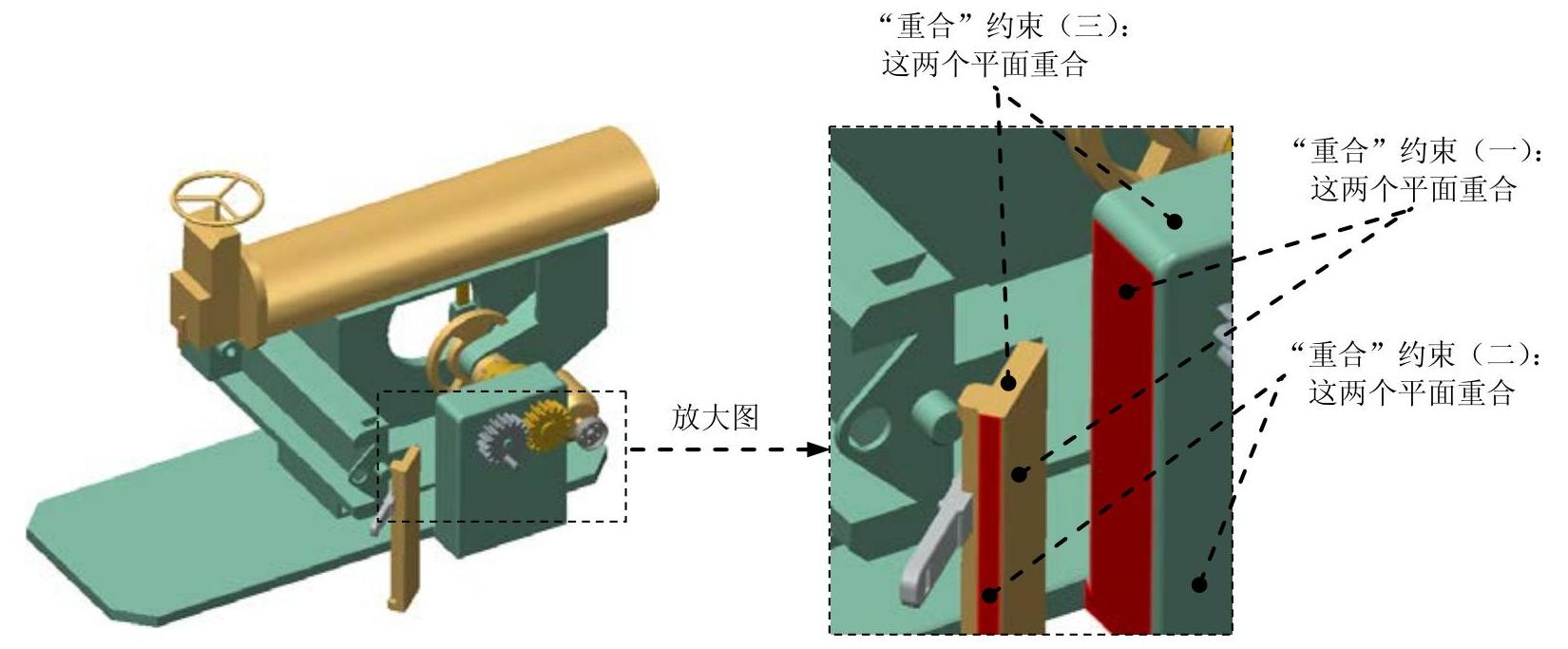
图9.6.57 创建刚性(Rigid)连接
Step24.创建body和translation_mech_asm之间的刚性连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“重合”约束(一)。在 下拉列表中选择
下拉列表中选择 选项,选取图9.6.57所示的两个平面为“重合”约束(一)的参考。
选项,选取图9.6.57所示的两个平面为“重合”约束(一)的参考。
(3)定义“重合”约束(二)。在 界面中单击
界面中单击 ,在
,在 下拉列表中选择
下拉列表中选择 选项,选取图9.6.57中的两个平面为“重合”约束(二)的参考。
选项,选取图9.6.57中的两个平面为“重合”约束(二)的参考。
(4)定义“重合”约束(三)。参考步骤(3)选取图9.6.57中的两个平面为“重合”约束(三)的参考。
(5)单击操控板中的 按钮,完成刚性连接的创建,如图9.6.58所示。
按钮,完成刚性连接的创建,如图9.6.58所示。
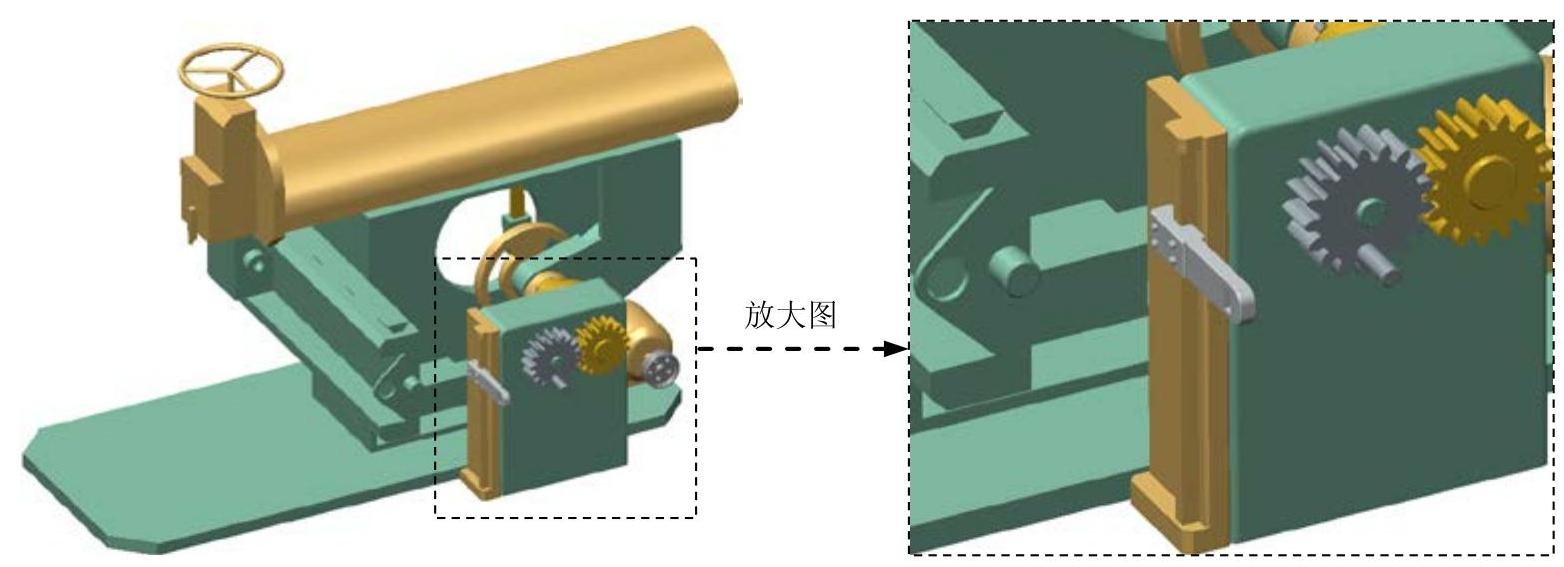
图9.6.58 完成连接
Step25.引入元件syn_rod.prt,并将其调整到图9.6.59所示的位置。
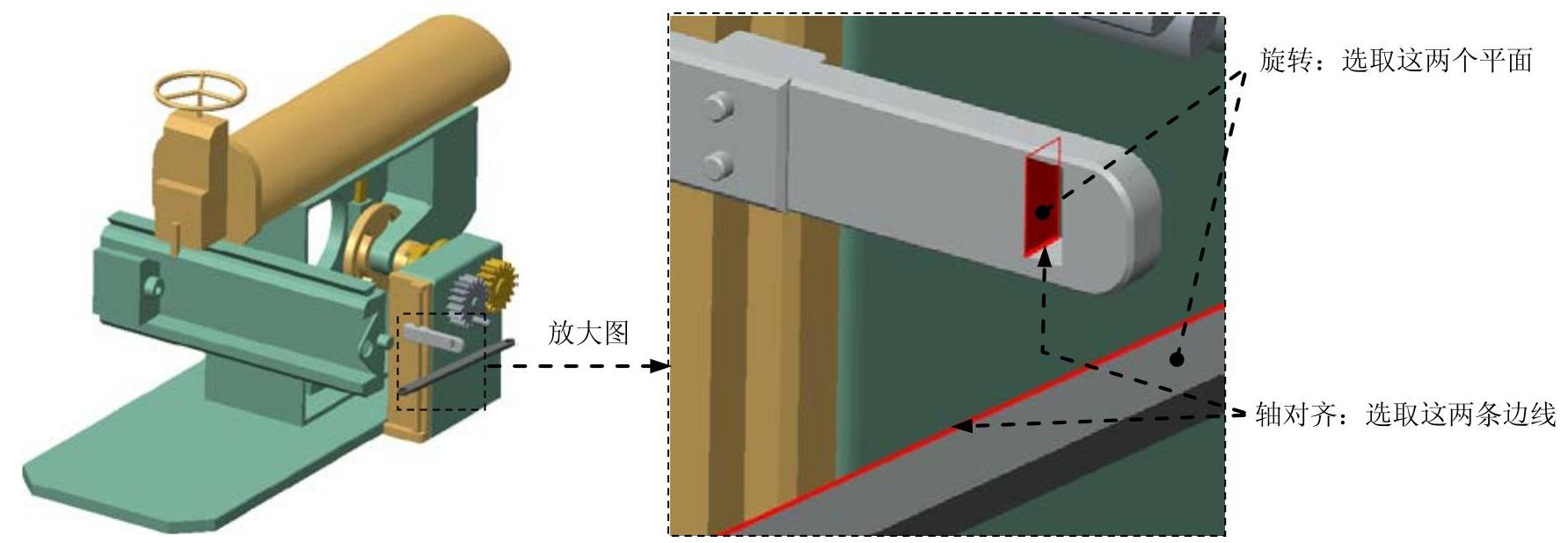
图9.6.59 创建滑块(Slider)连接
Step26.创建syn_rod和translation_mech_slider之间的滑块连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.6.59所示的两条边线为“轴对齐”约束参考,此时 界面如图9.6.60所示。
界面如图9.6.60所示。
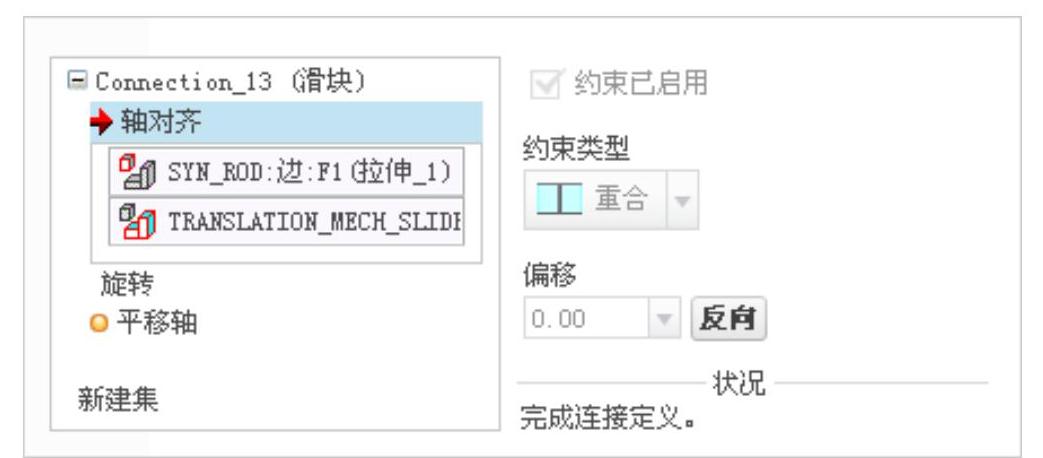
图9.6.60 “放置”界面
(3)定义“旋转”约束。分别选取图9.6.59所示的两个平面为“旋转”约束参考,此时 界面如图9.6.61所示。
界面如图9.6.61所示。
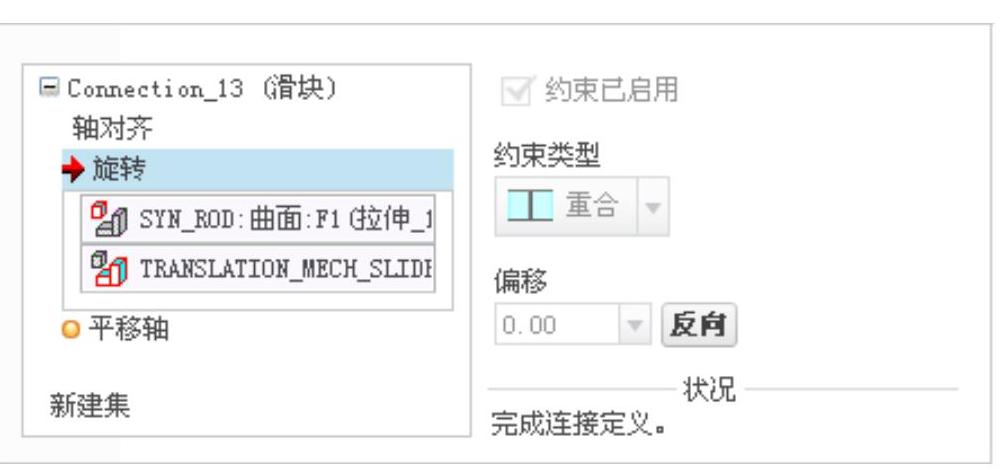
图9.6.61 “放置”界面
Step27.创建syn_rod和gear之间的圆柱连接。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.62所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.6.62所示的两个柱面为“轴对齐”约束参考,此时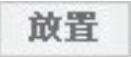 界面如图9.6.63所示。
界面如图9.6.63所示。
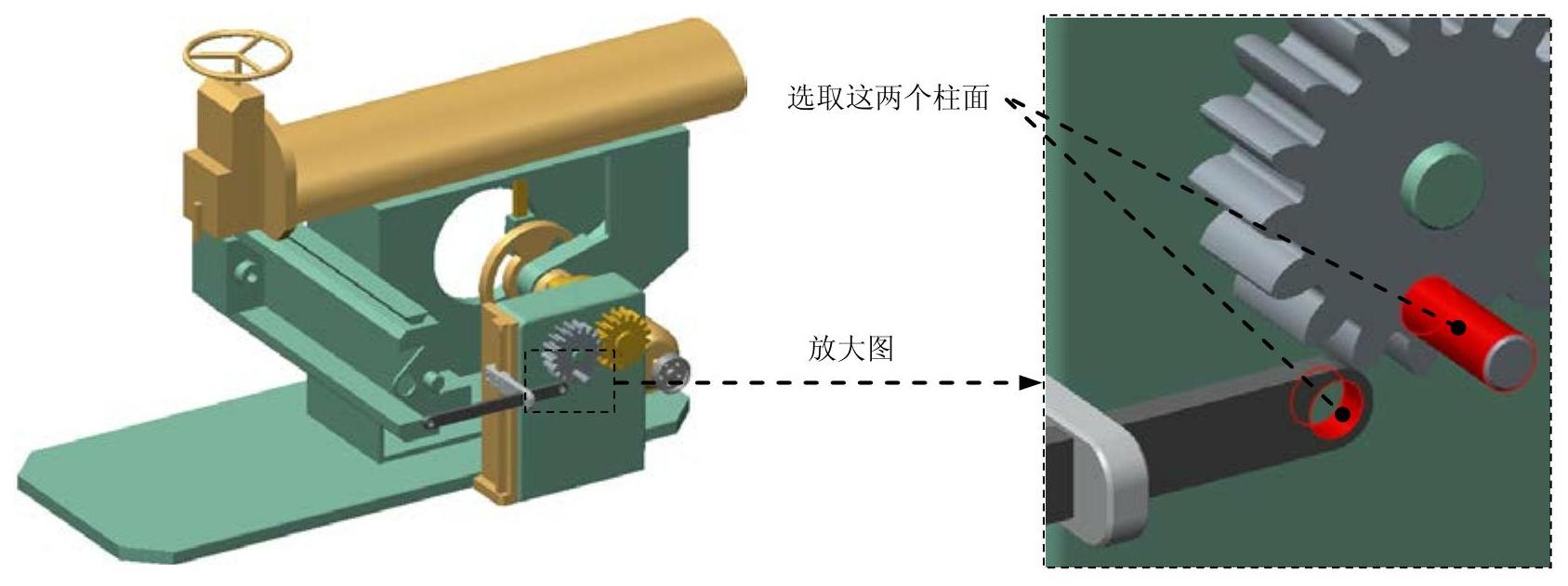
图9.6.62 创建圆柱(Cylinder)连接
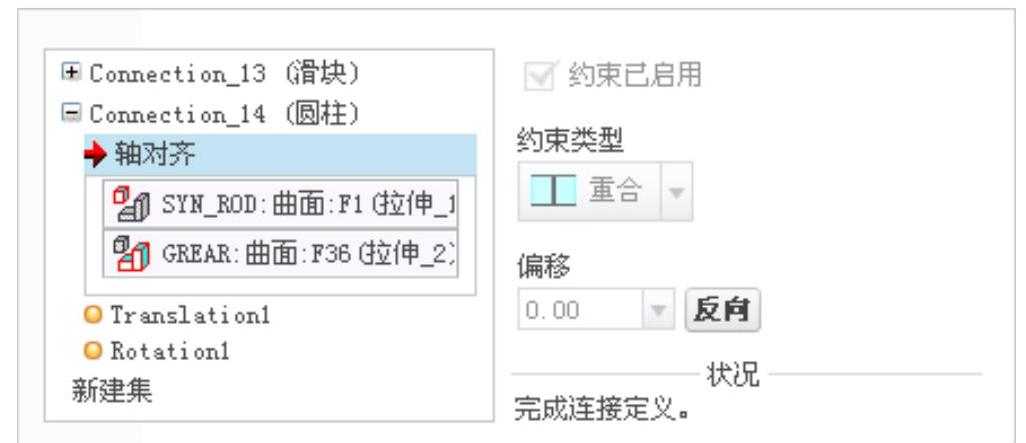
图9.6.63 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step28.引入元件wheel.prt,并将其调整到图9.6.64所示的位置。
图9.6.64 创建“销(Pin)”连接
Step29.创建wheel和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.64中的两个柱面为“轴对齐”约束参考,如图9.6.65所示。
按钮,分别选取图9.6.64中的两个柱面为“轴对齐”约束参考,如图9.6.65所示。
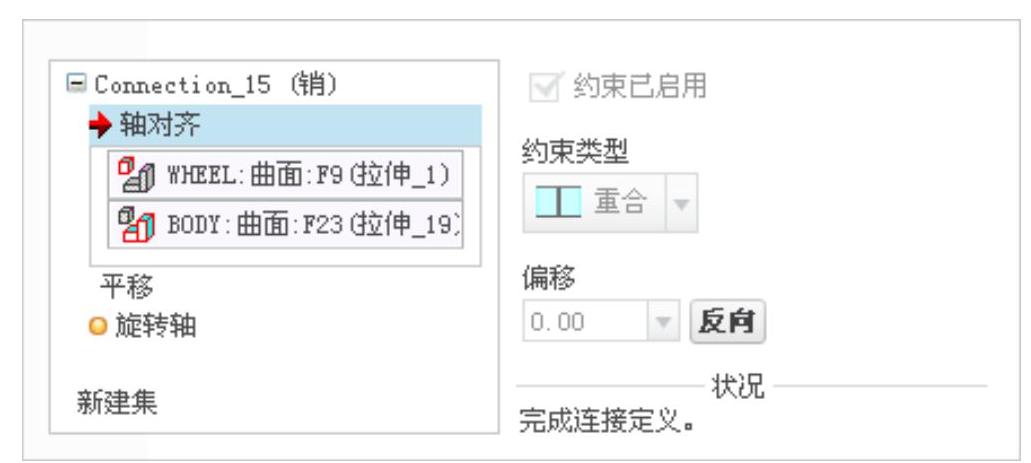
图9.6.65 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.64中的两个平面为“平移”约束的参考,如图9.6.66所示。
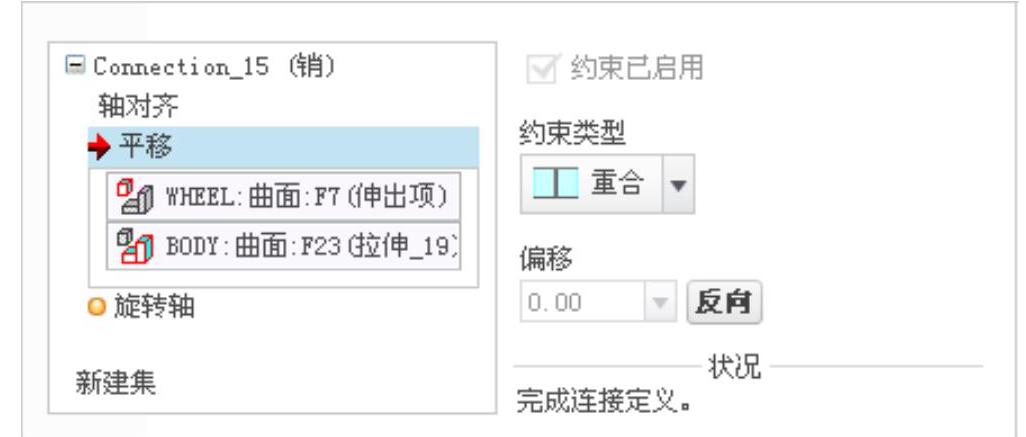
图9.6.66 定义“平移”约束
Step30.创建wheel和syn_rod之间的圆柱连接。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.67所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.6.67所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.6.68所示。
界面如图9.6.68所示。
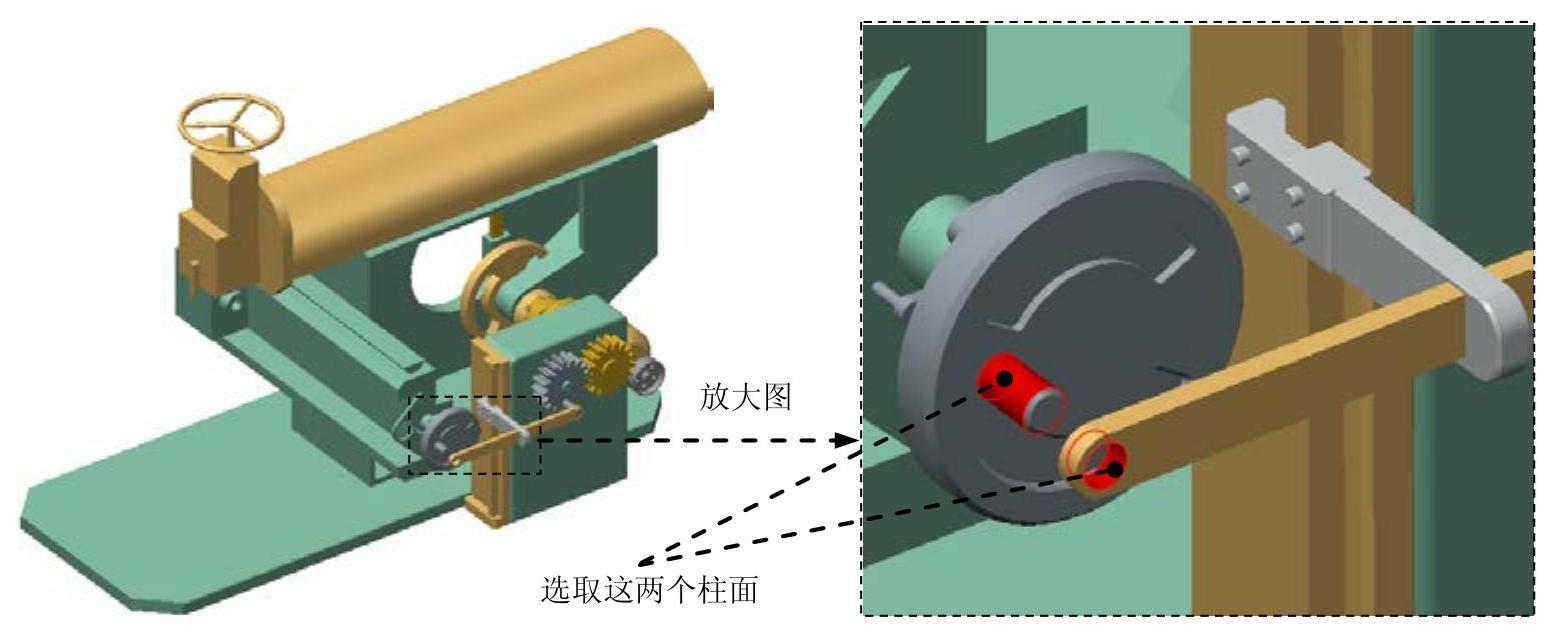
图9.6.67 创建圆柱(Cylinder)连接
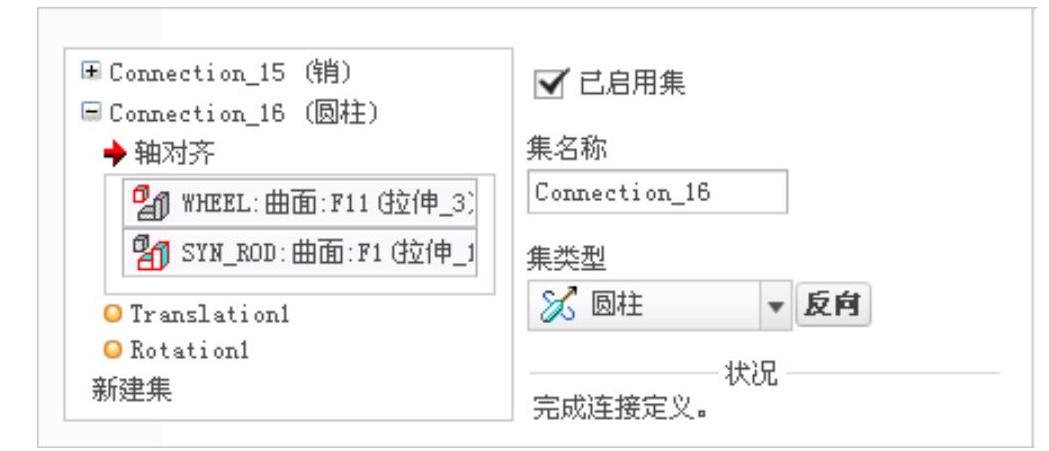
图9.6.68 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step31.引入元件screw.prt,并将其调整到图9.6.69所示的位置。
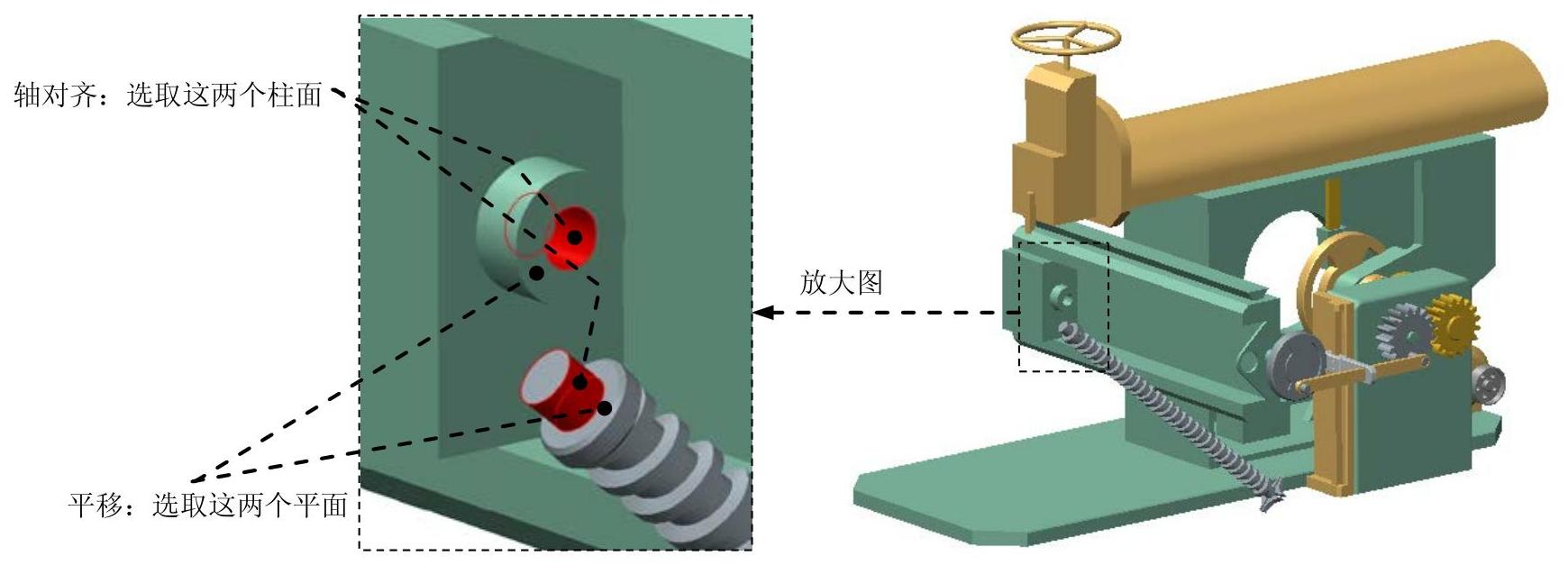
图9.6.69 创建“销(Pin)”连接
Step32.创建wheel和body之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.6.69中的两个柱面为“轴对齐”约束参考,如图9.6.70所示。
按钮,分别选取图9.6.69中的两个柱面为“轴对齐”约束参考,如图9.6.70所示。
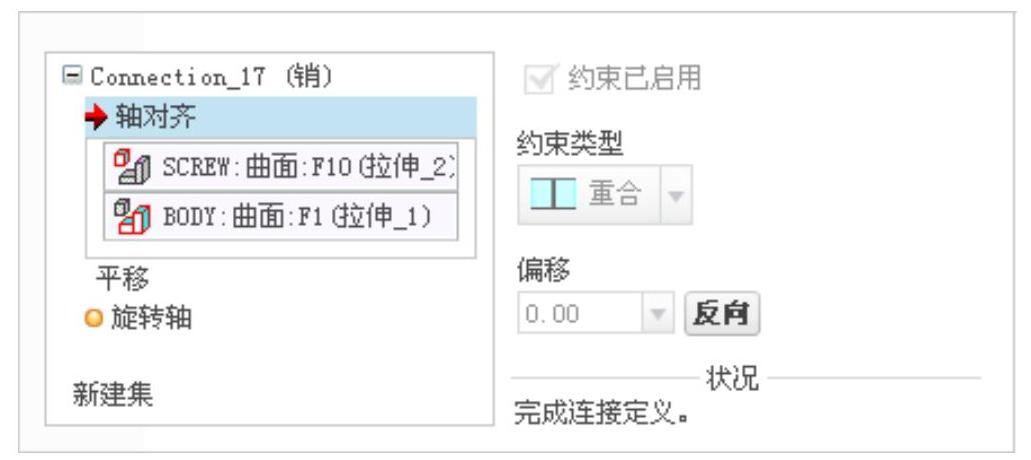
图9.6.70 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.6.69中的两个平面为“平移”约束的参考,如图9.6.71所示。
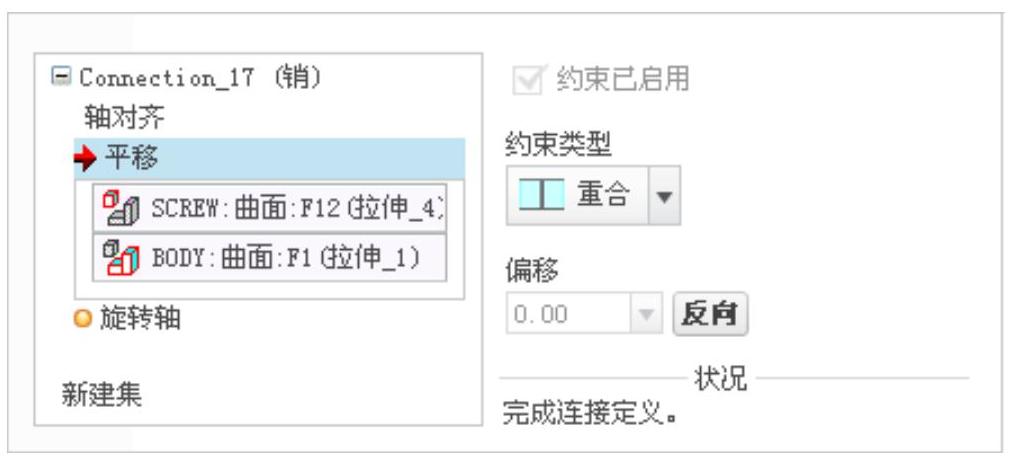
图9.6.71 定义“平移”约束
(4)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step33.引入工作台组件table_asm.asm,并将其调整到图9.6.72所示的位置(在模型树树中隐藏元件ram)。
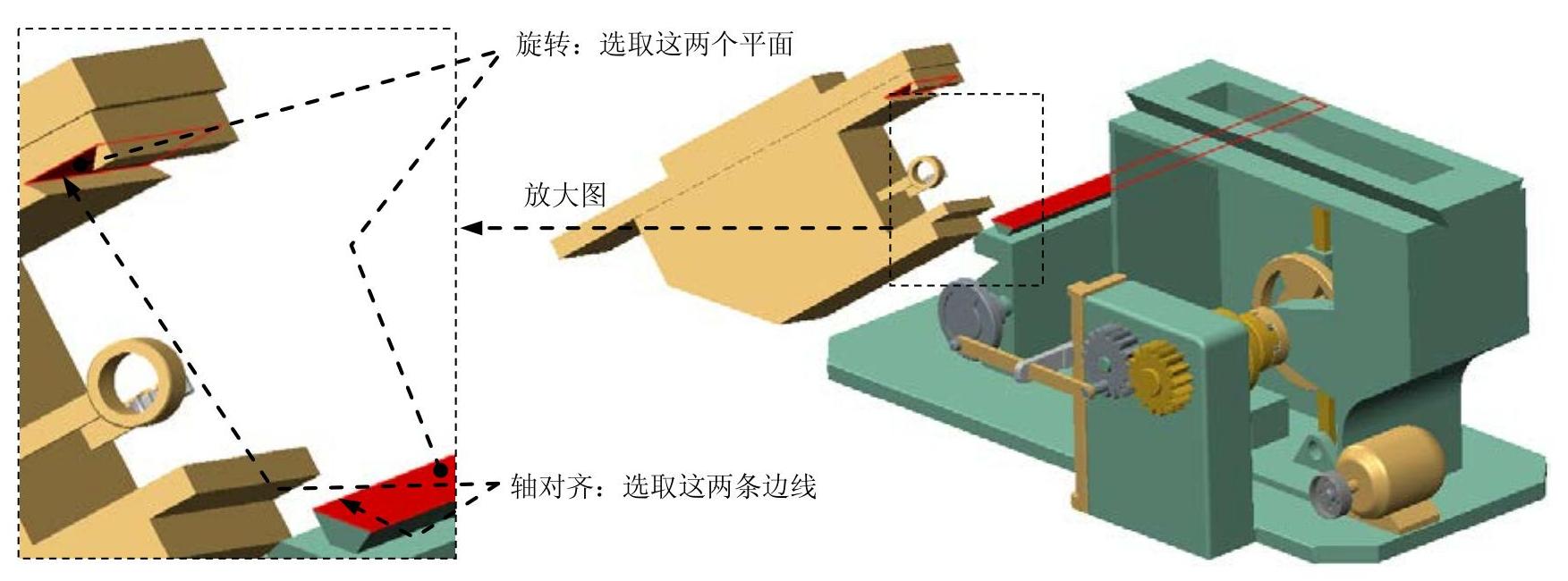
图9.6.72 创建滑块(Slider)连接
Step34.创建table_asm和body之间的滑块连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.6.72所示的两条边线为“轴对齐”约束参考,此时 界面如图9.6.73所示。
界面如图9.6.73所示。

图9.6.73 “放置”界面
(3)定义“旋转”约束。分别选取图9.6.72所示的两个平面为“旋转”约束参考,此时 界面如图9.6.74所示。
界面如图9.6.74所示。
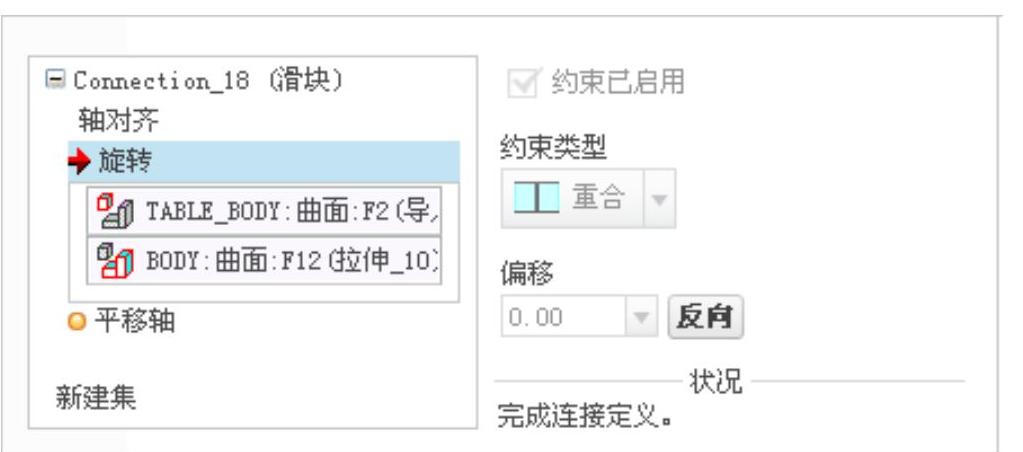
图9.6.74 “放置”界面
(4)设置平移轴参考。在 界面中单击
界面中单击 选项,选取图9.6.75所示两个平面为平移轴参考。
选项,选取图9.6.75所示两个平面为平移轴参考。
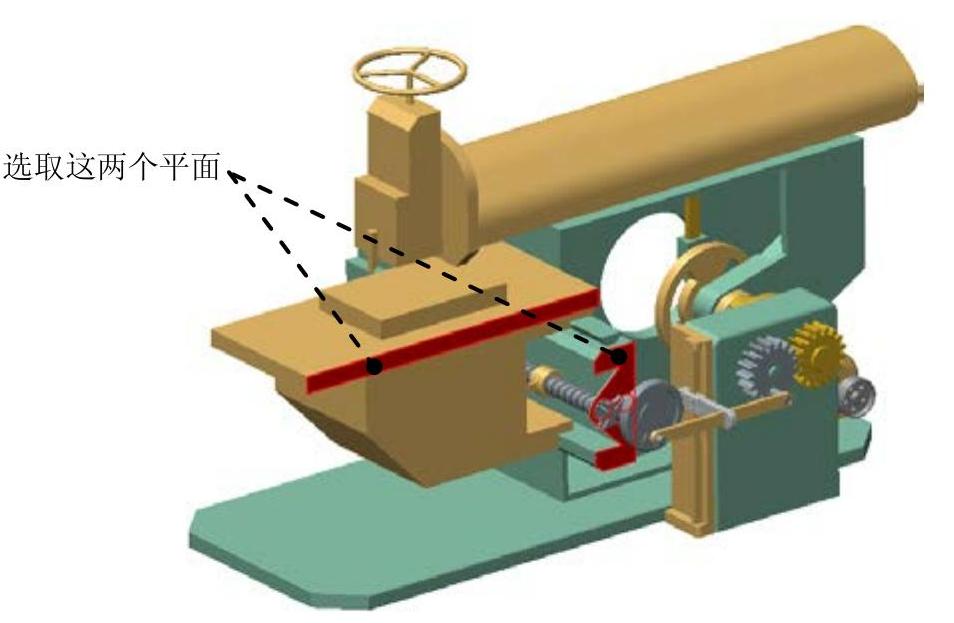
图9.6.75 设置平移轴参考
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值-167,并按Enter键确认;然后单击
区域下的文本框中输入值-167,并按Enter键确认;然后单击 按钮,选中
按钮,选中 复选框,如图9.6.76所示。
复选框,如图9.6.76所示。
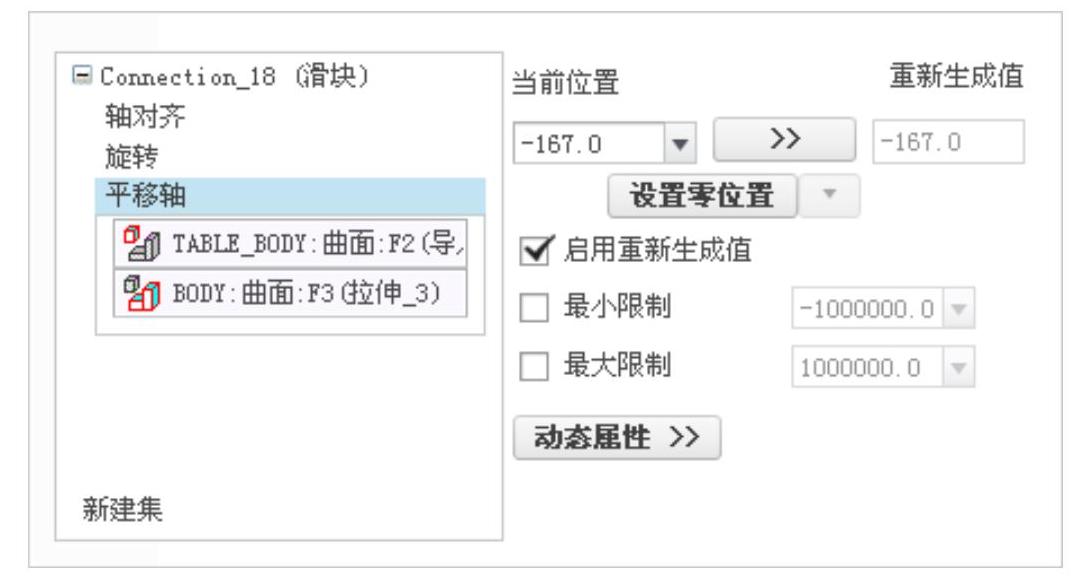
图9.6.76 设置位置参数
(6)单击操控板中的 按钮,完成滑块连接的创建。
按钮,完成滑块连接的创建。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





