Step1.引入第一个元件base.prt,并使用 约束完全约束该元件。
约束完全约束该元件。
Step2.引入元件link01.prt,并将其调整到图9.5.2所示的位置。
Step3.创建base和link01之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.2中的两个柱面为“轴对齐”约束参考,如图9.5.3所示。
按钮,分别选取图9.5.2中的两个柱面为“轴对齐”约束参考,如图9.5.3所示。
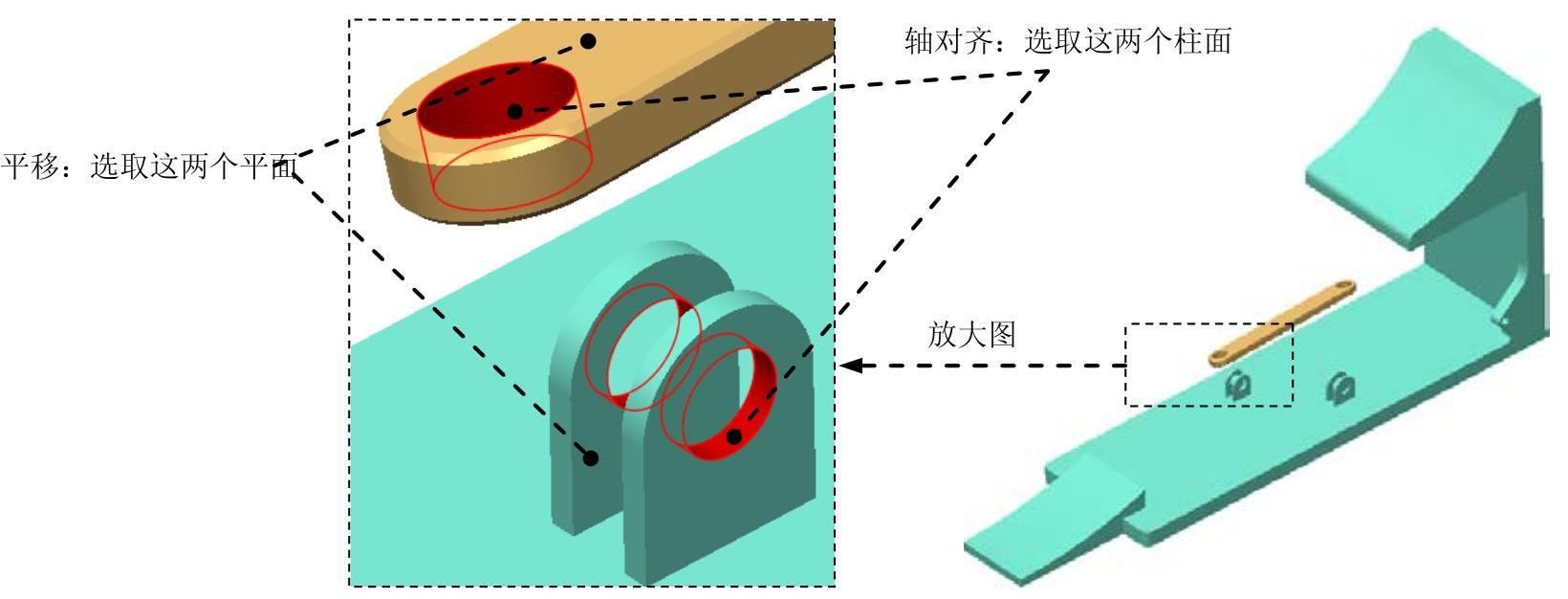
图9.5.2 创建“销(Pin)”连接
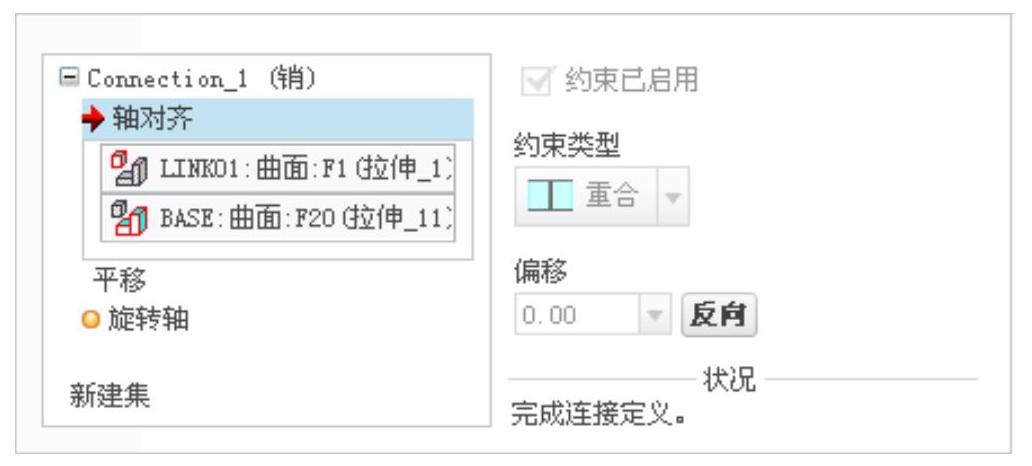
图9.5.3 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.2中的两个平面为“平移”约束的参考,如图9.5.4所示。
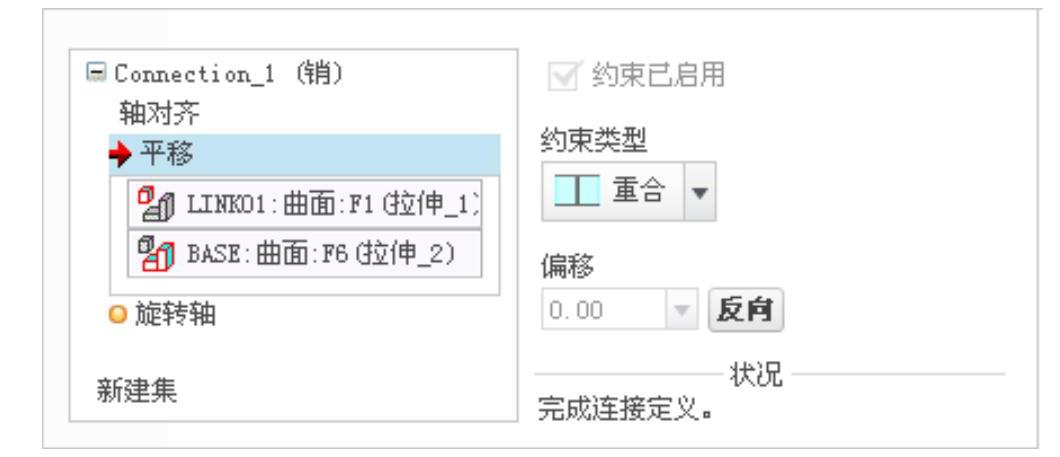
图9.5.4 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,分别选取图9.5.5中的两个平面为旋转轴参考。
选项,分别选取图9.5.5中的两个平面为旋转轴参考。
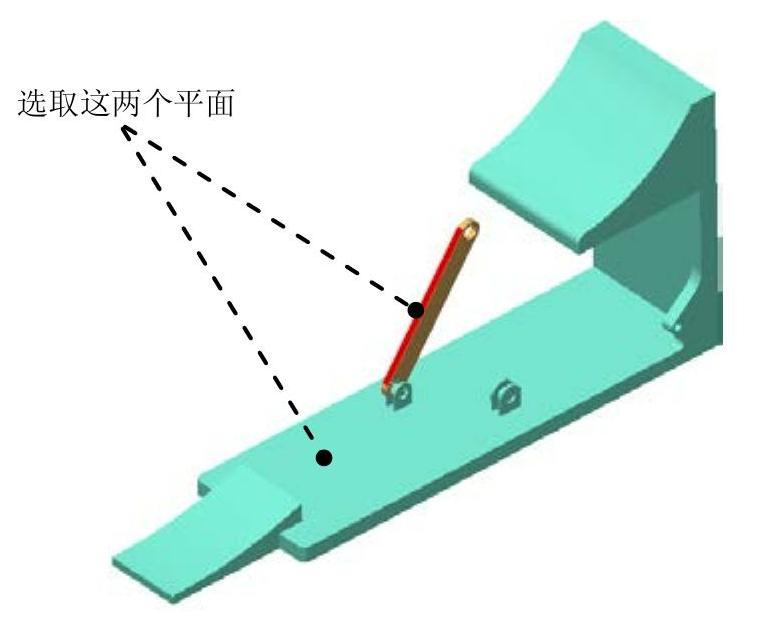
图9.5.5 创建“销(Pin)”连接
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值-54,并按Enter键确认,然后单击
区域下的文本框中输入值-54,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.5.6所示。
复选框,如图9.5.6所示。
(6)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
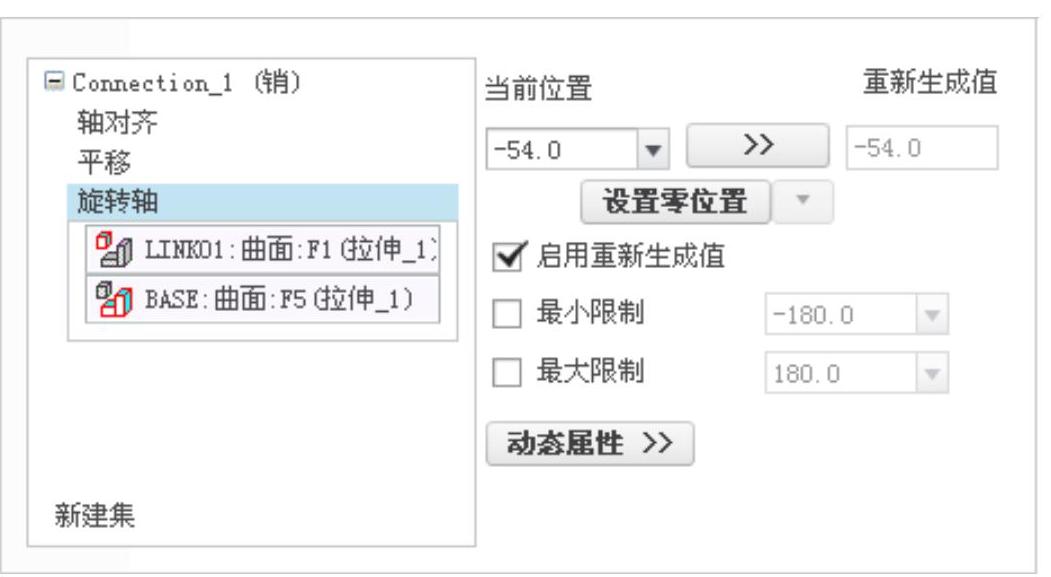
图9.5.6 设置位置参数
Step4.引入元件link02.prt,并将其调整到图9.5.7所示的位置。
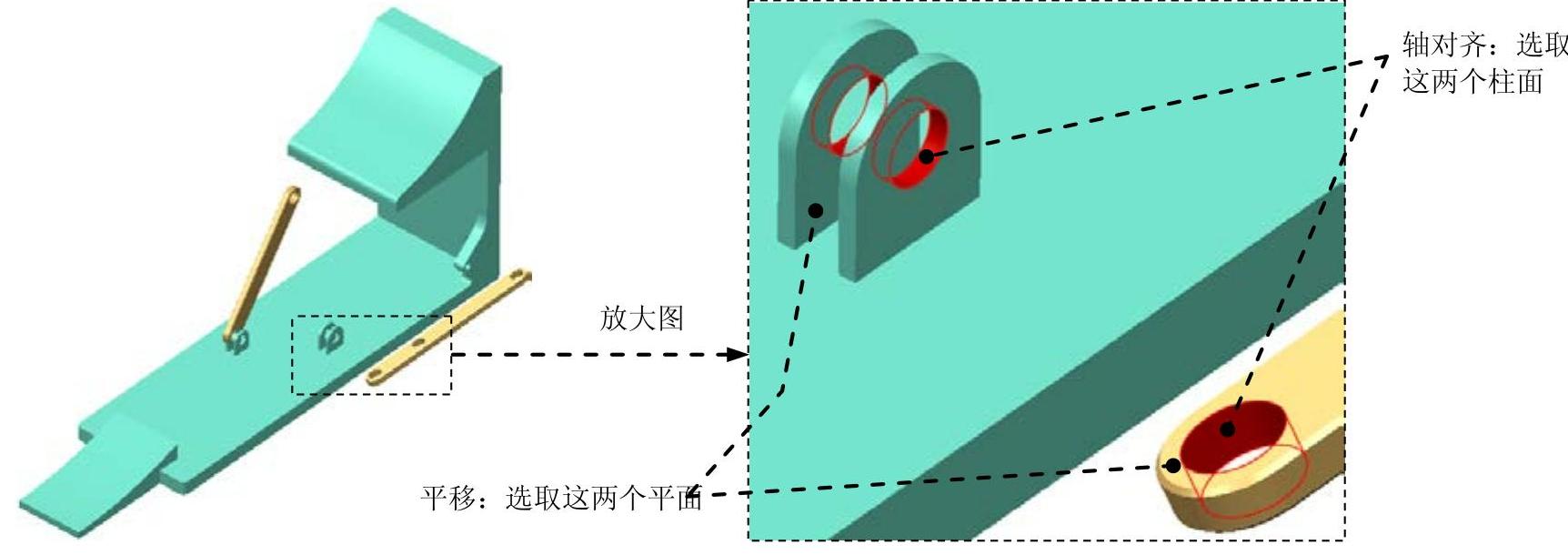
图9.5.7 创建“销(Pin)”连接
Step5.创建base和link02之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.7中的两个柱面为“轴对齐”约束参考,如图9.5.8所示。
按钮,分别选取图9.5.7中的两个柱面为“轴对齐”约束参考,如图9.5.8所示。
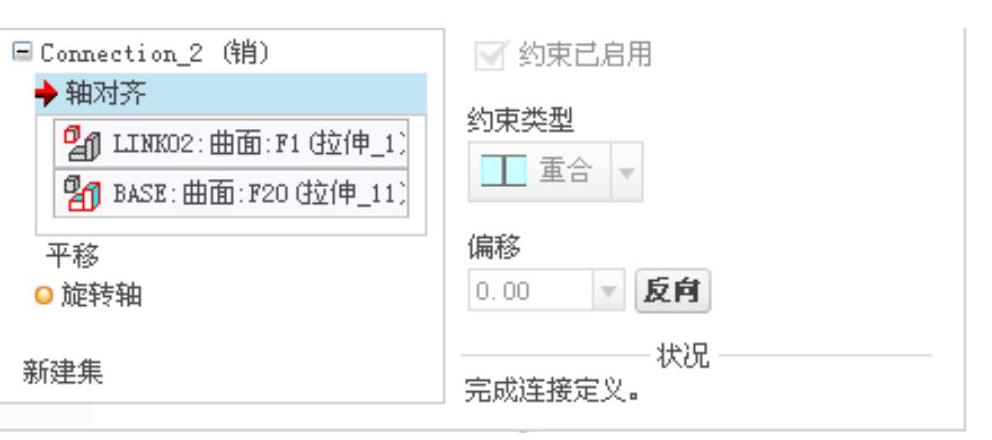
图9.5.8 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.7中的两个平面为“平移”约束的参考,如图9.5.9所示。
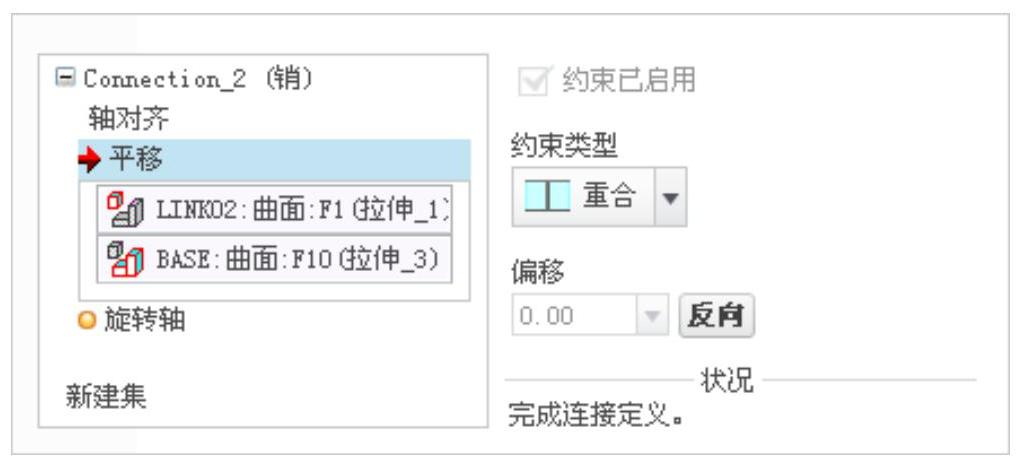
图9.5.9 定义“平移”约束
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,分别选取图9.5.10中的两个平面为旋转轴参考。
选项,分别选取图9.5.10中的两个平面为旋转轴参考。
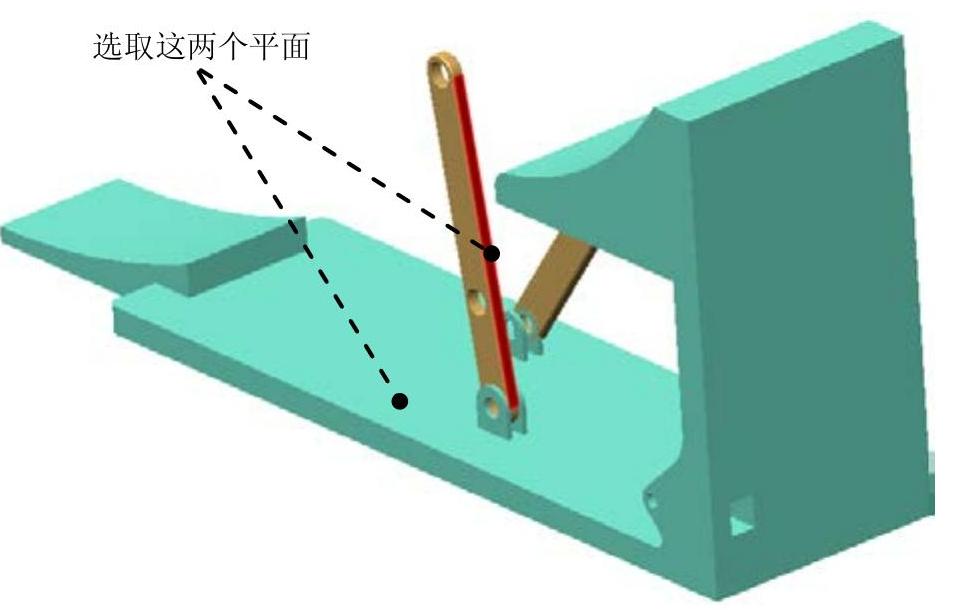
图9.5.10 创建“销(Pin)”连接
(5)设置位置参数。在 界面右侧
界面右侧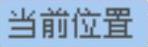 区域下的文本框中输入值80.6,并按Enter键确认,然后单击
区域下的文本框中输入值80.6,并按Enter键确认,然后单击 按钮;选中
按钮;选中 复选框,如图9.5.11所示。
复选框,如图9.5.11所示。
(6)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。

图9.5.11 设置位置参数
Step6.引入元件arm.prt并将其调整到图9.5.12所示的位置。
图9.5.12 创建“销(Pin)”连接
Step7.创建arm和link01之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.12中的两个柱面为“轴对齐”约束参考,如图9.5.13所示。
按钮,分别选取图9.5.12中的两个柱面为“轴对齐”约束参考,如图9.5.13所示。
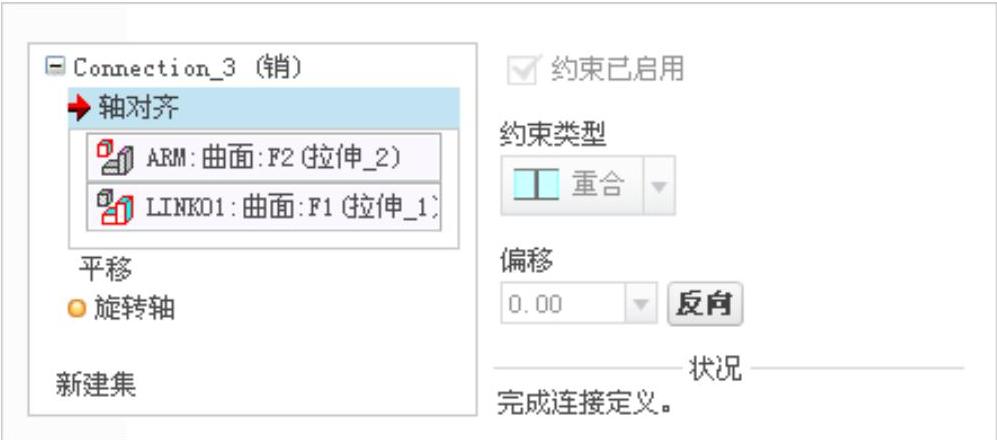
图9.5.13 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.12中的两个平面为“平移”约束的参考,如图9.5.14所示。

图9.5.14 定义“平移”约束
Step8.创建arm和link01之间的圆柱连接。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.15所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.5.15所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.5.16所示。
界面如图9.5.16所示。
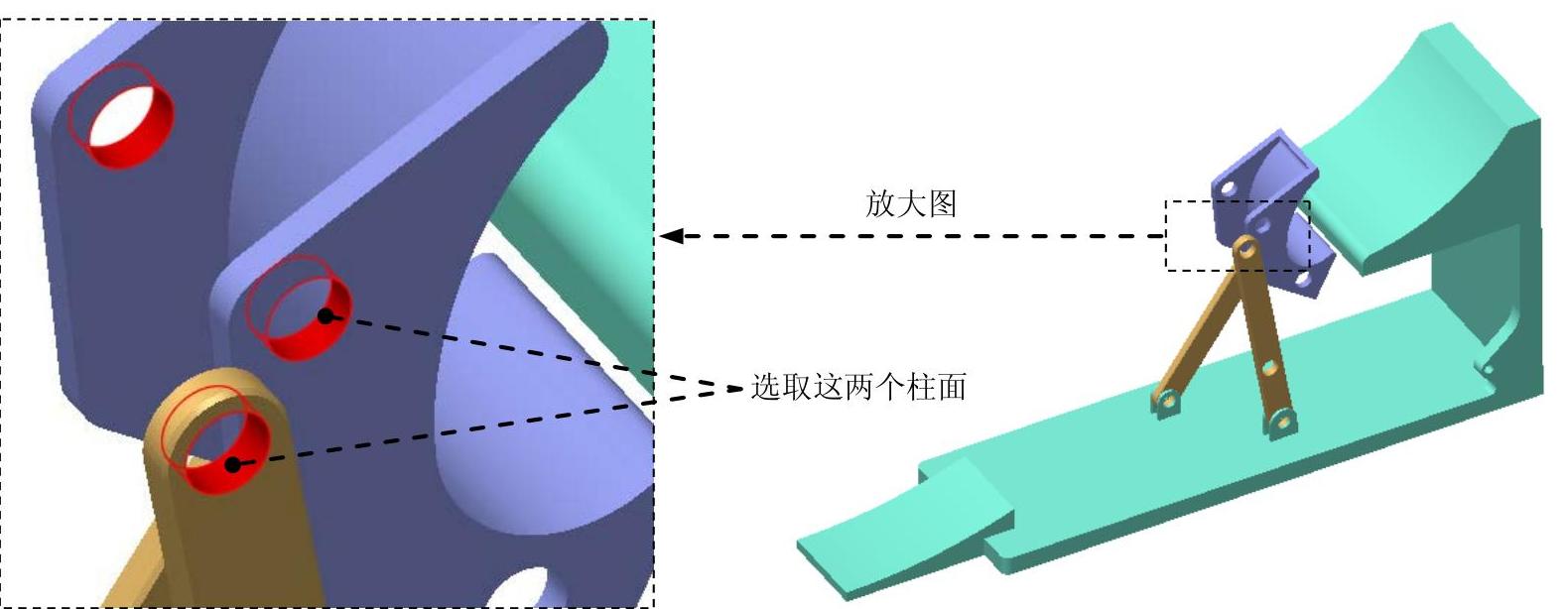
图9.5.15 创建圆柱(Cylinder)连接
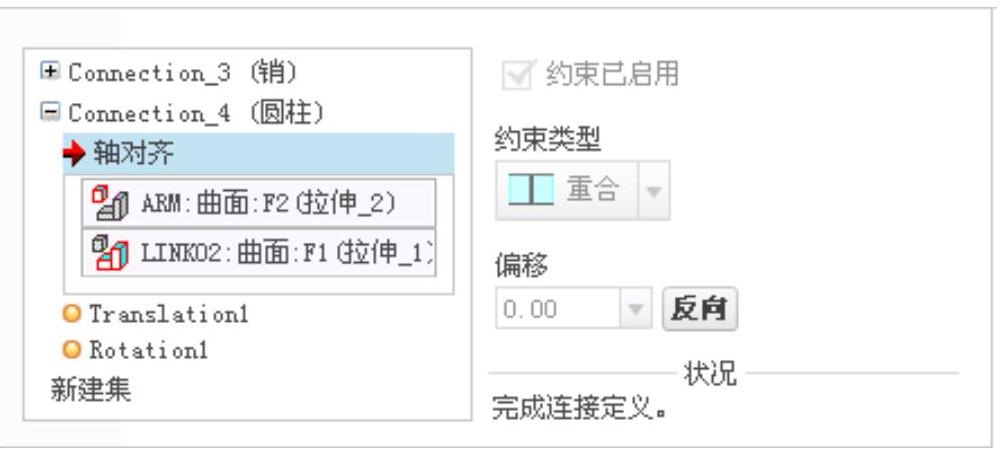
图9.5.16 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step9.引入元件slider.prt,并将其调整到图9.5.17所示的位置。
Step10.创建slider和base之间的滑块连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图9.5.17所示的两条边线为“轴对齐”约束参考,此时 界面如图9.5.18所示。
界面如图9.5.18所示。
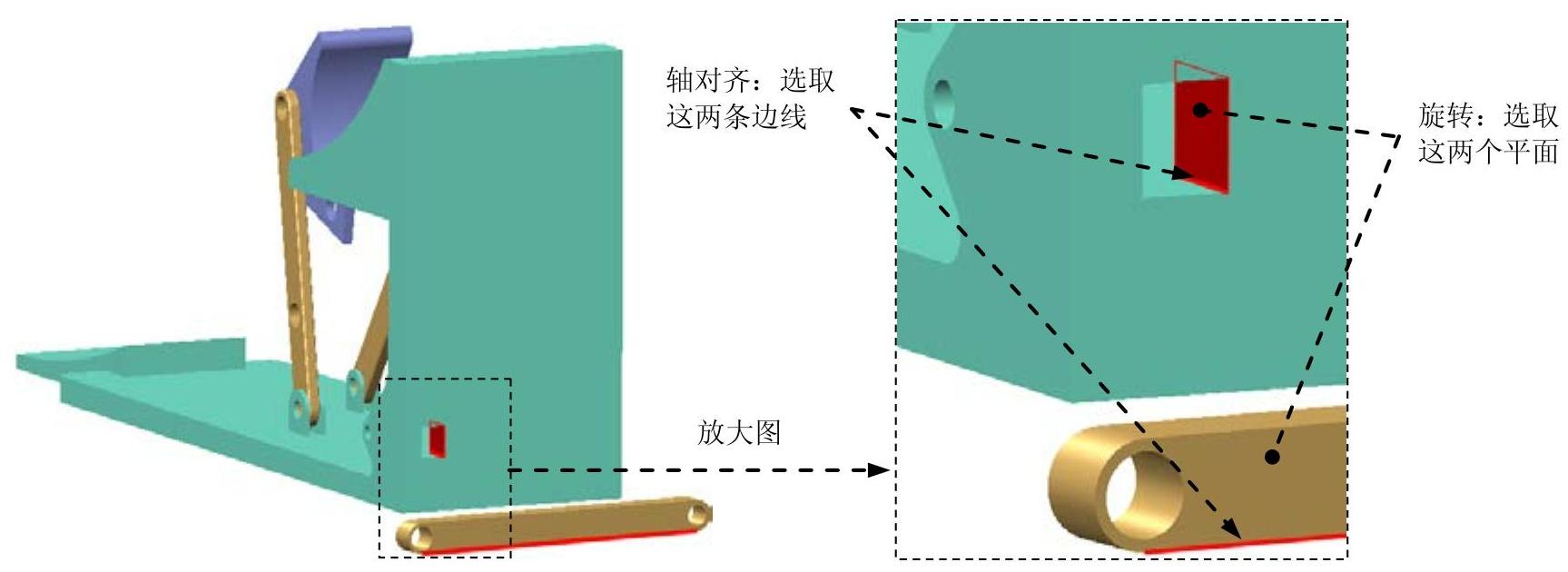
图9.5.17 创建滑块(Slider)连接
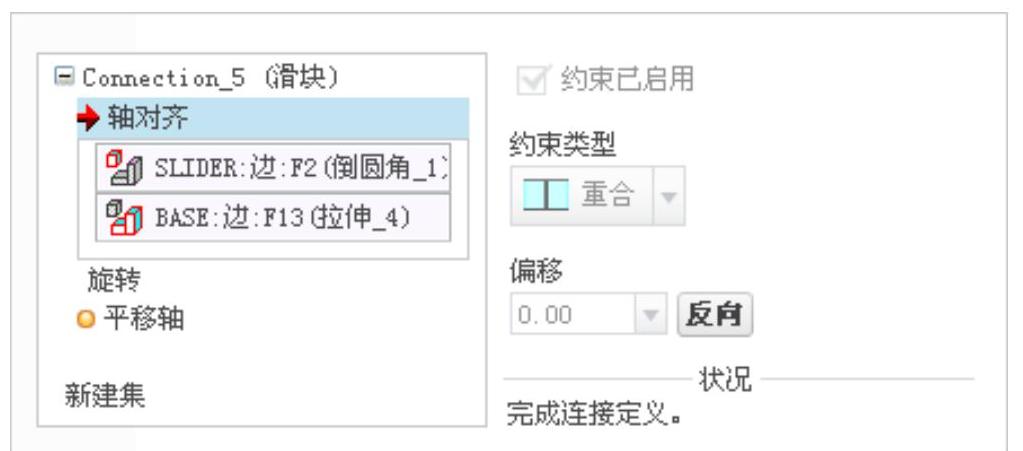
图9.5.18 “放置”界面
(3)定义“旋转”约束。分别选取图9.5.17所示的两个平面为“旋转”约束参考,此时 界面如图9.5.19所示。
界面如图9.5.19所示。
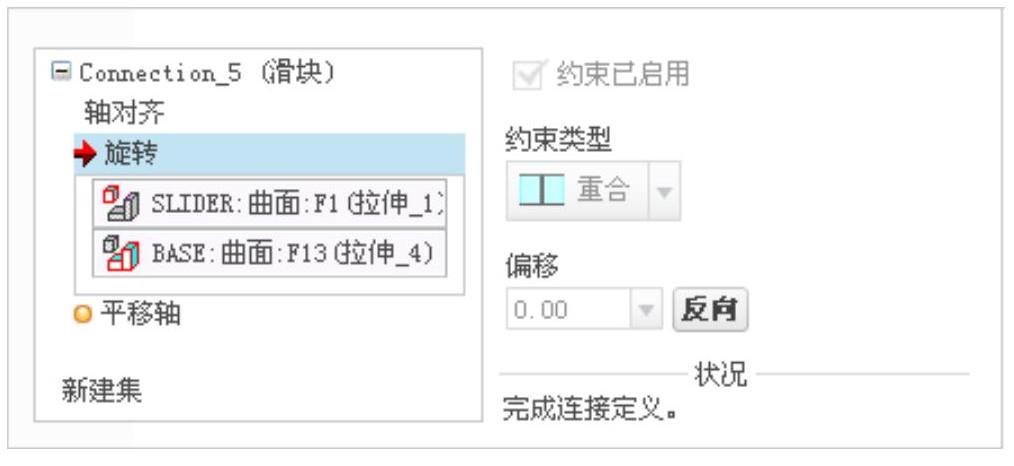
图9.5.19 “放置”界面
(4)设置平移轴参考。在 界面中单击
界面中单击 选项,选取图9.5.20所示顶点和平面为平移轴参考。
选项,选取图9.5.20所示顶点和平面为平移轴参考。
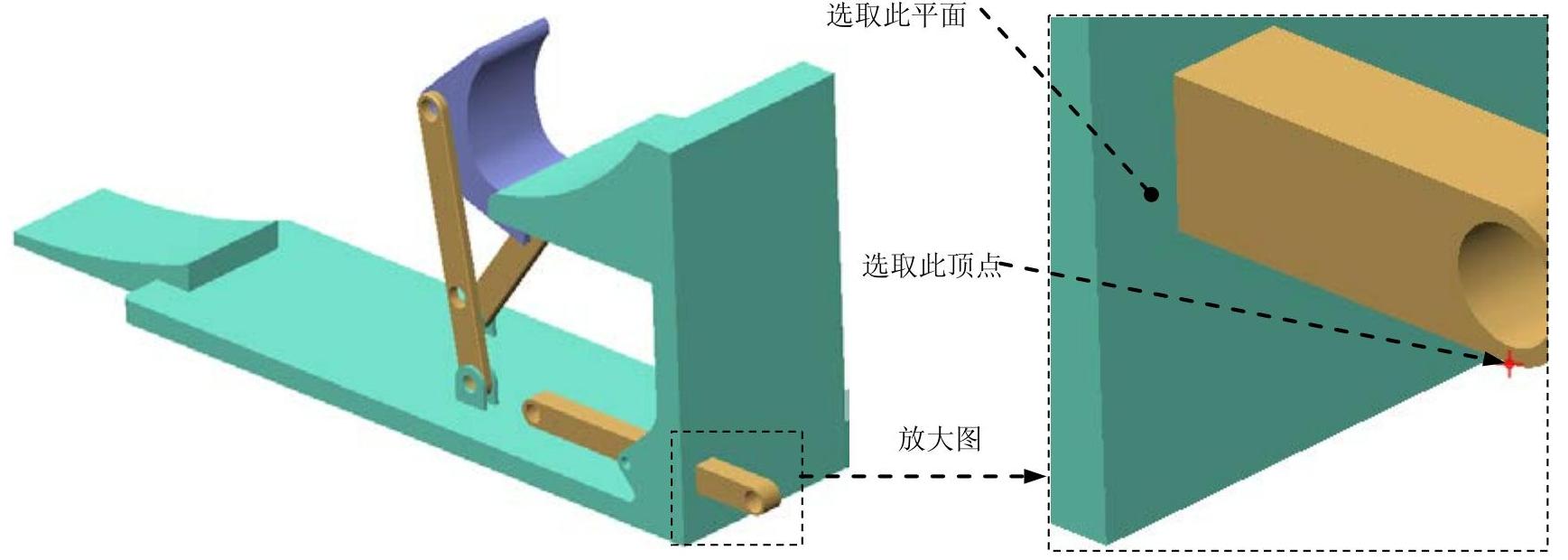
图9.5.20 设置平移轴参考
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值-63.9,并按Enter键确认,如图9.5.21所示。
区域下的文本框中输入值-63.9,并按Enter键确认,如图9.5.21所示。
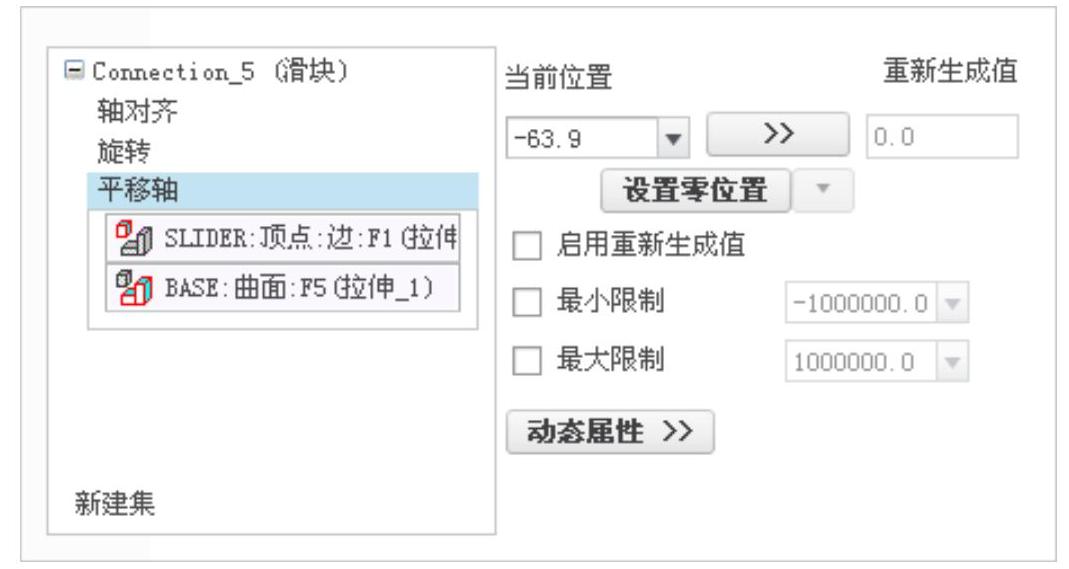
图9.5.21 设置位置参数(www.daowen.com)
(6)单击操控板中的 按钮,完成滑块连接的创建。
按钮,完成滑块连接的创建。
Step11.引入元件link03.prt,并将其调整到图9.5.22所示的位置。
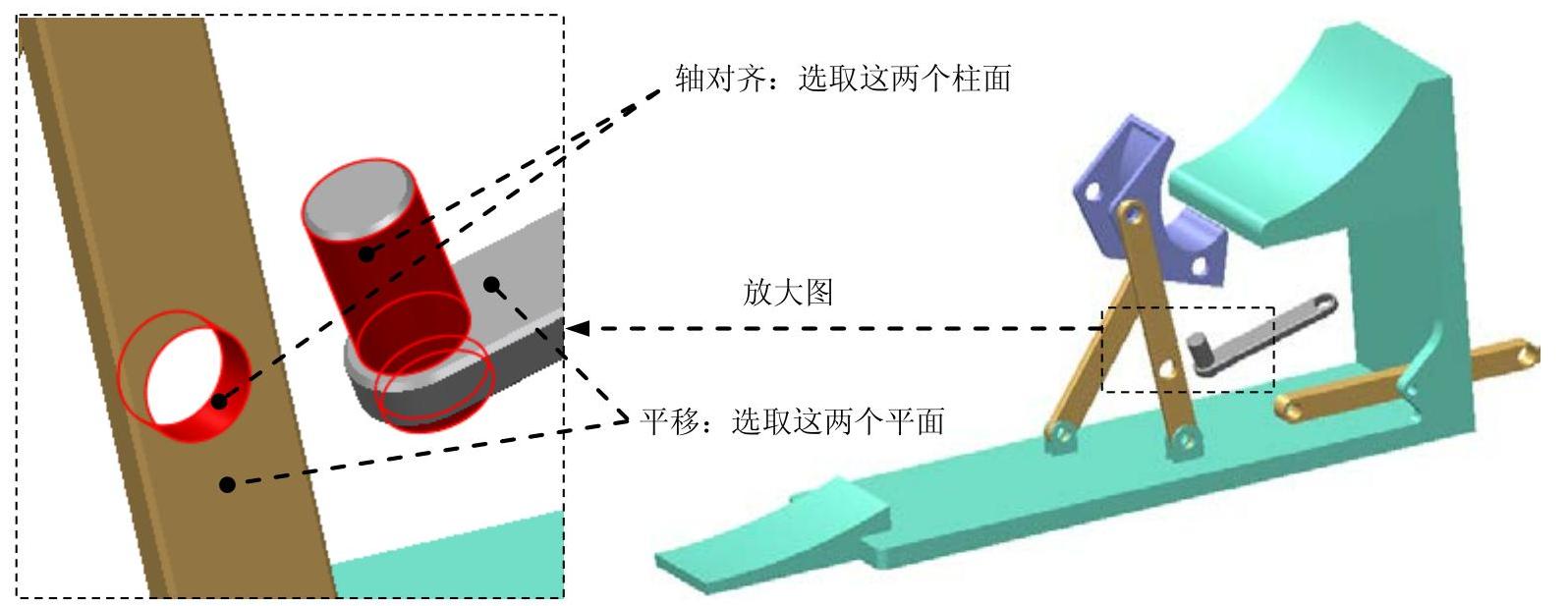
图9.5.22 创建“销(Pin)”连接
Step12.创建link03和link02之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.22中的两个柱面为“轴对齐”约束参考,如图9.5.23所示。
按钮,分别选取图9.5.22中的两个柱面为“轴对齐”约束参考,如图9.5.23所示。
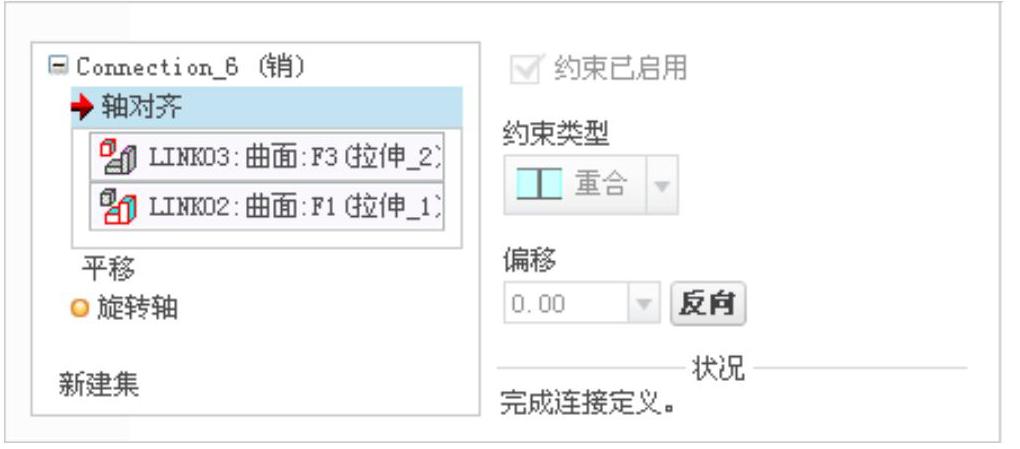
图9.5.23 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.22中的两个平面为“平移”约束的参考,如图9.5.24所示。
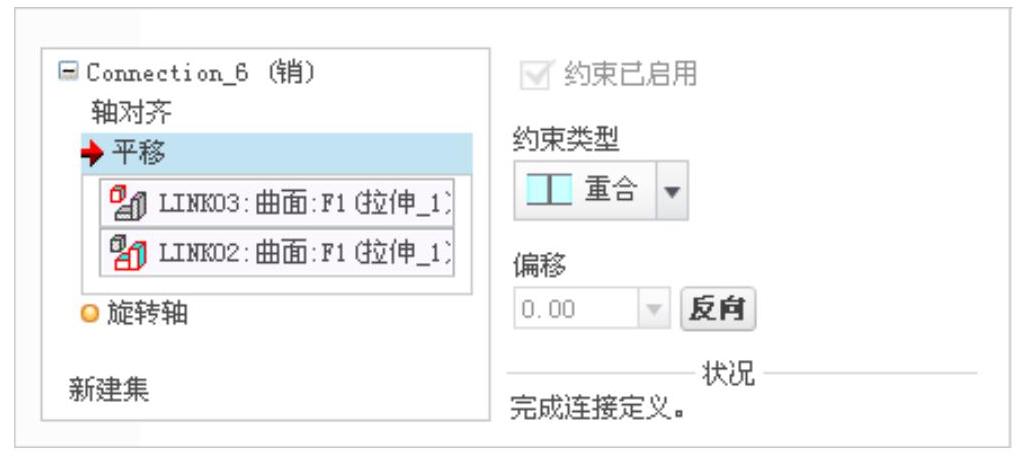
图9.5.24 定义“平移”约束
(4)调整元件link03至图9.5.25所示的位置。
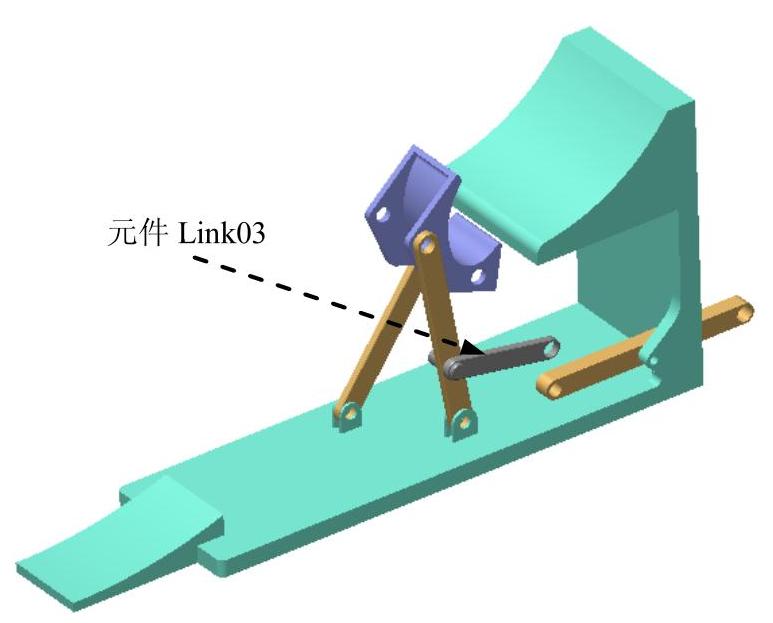
图9.5.25 调整模型位置
Step13.创建arm和link01之间的圆柱连接。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.26所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.5.26所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.5.27所示。
界面如图9.5.27所示。
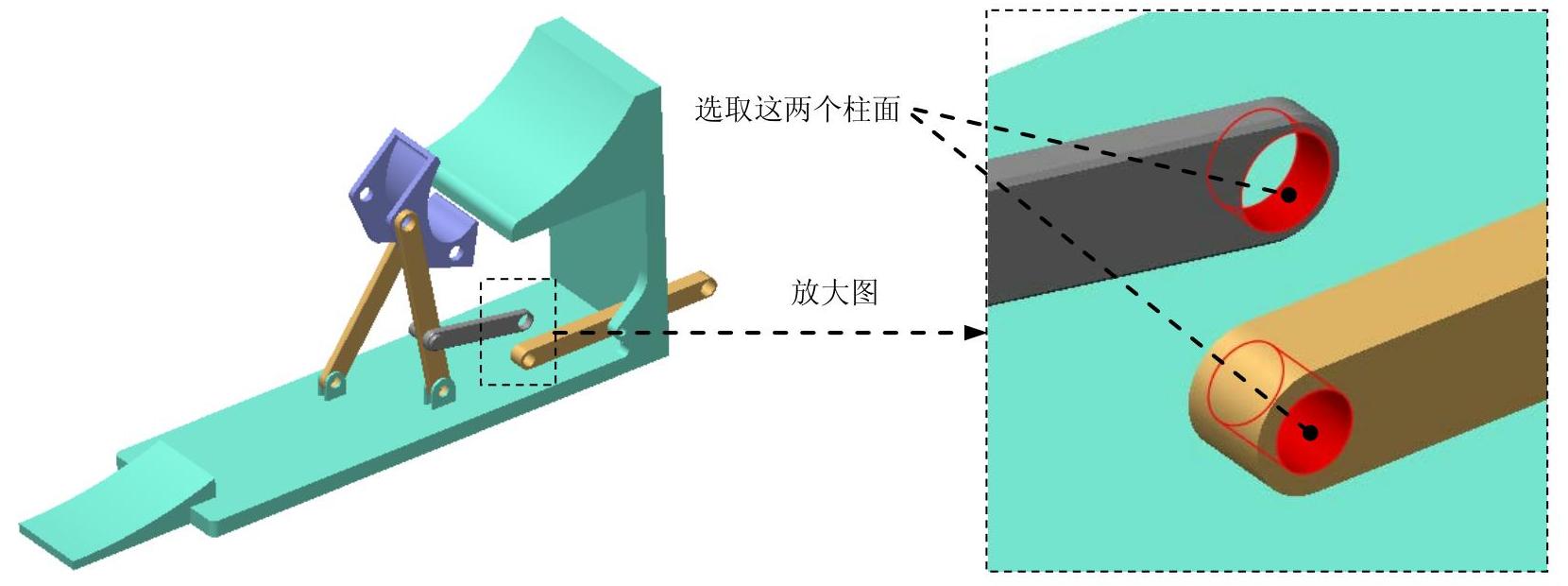
图9.5.26 创建圆柱(Cylinder)连接
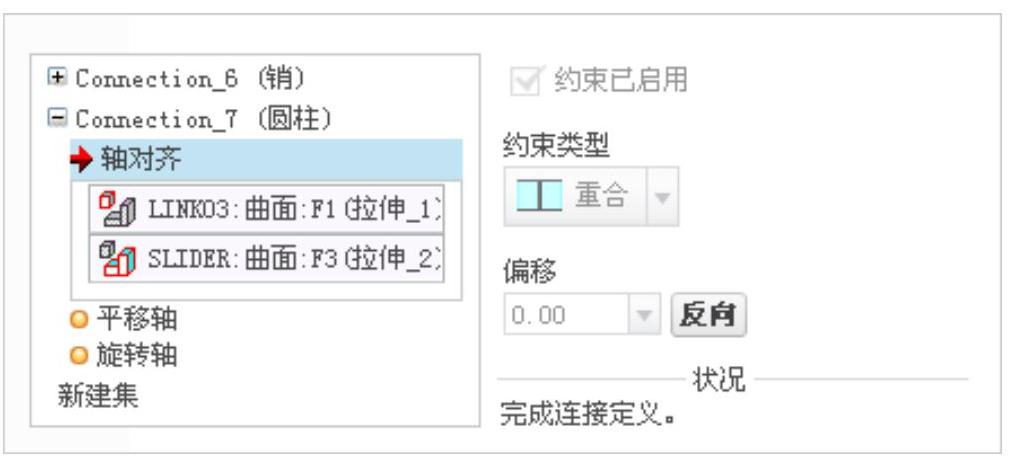
图9.5.27 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step14.引入元件wheel.prt,并将其调整到图9.5.28所示的位置。
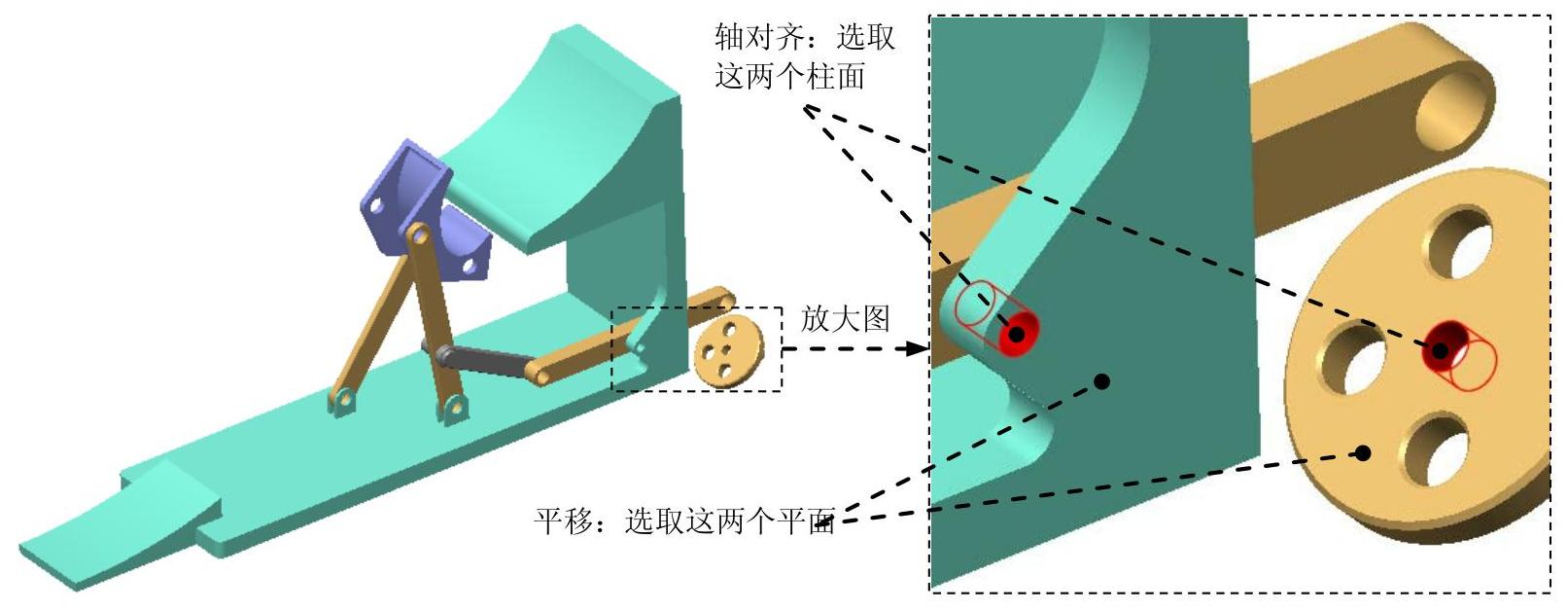
图9.5.28 创建“销(Pin)”连接
Step15.创建base和wheel之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.28中的两个柱面为“轴对齐”约束参考,如图9.5.29所示。
按钮,分别选取图9.5.28中的两个柱面为“轴对齐”约束参考,如图9.5.29所示。
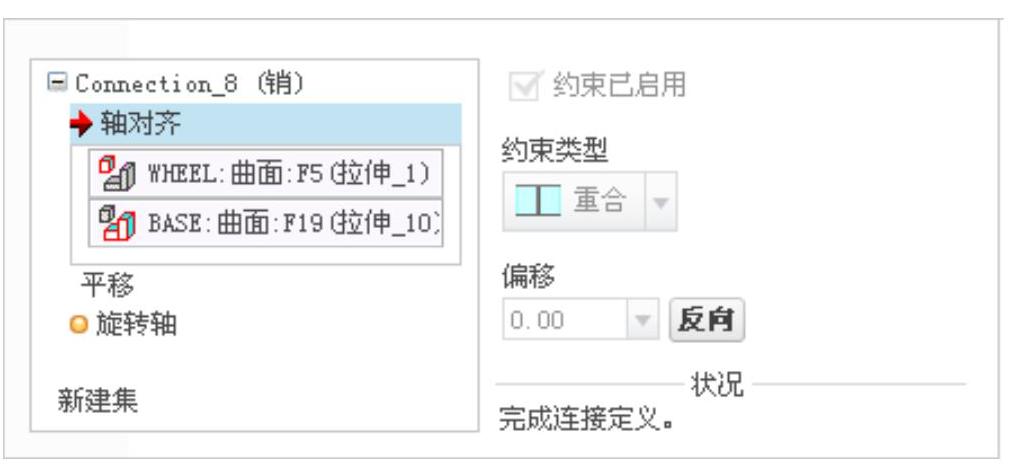
图9.5.29 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.28中的两个平面为“平移”约束的参考,如图9.5.30所示。
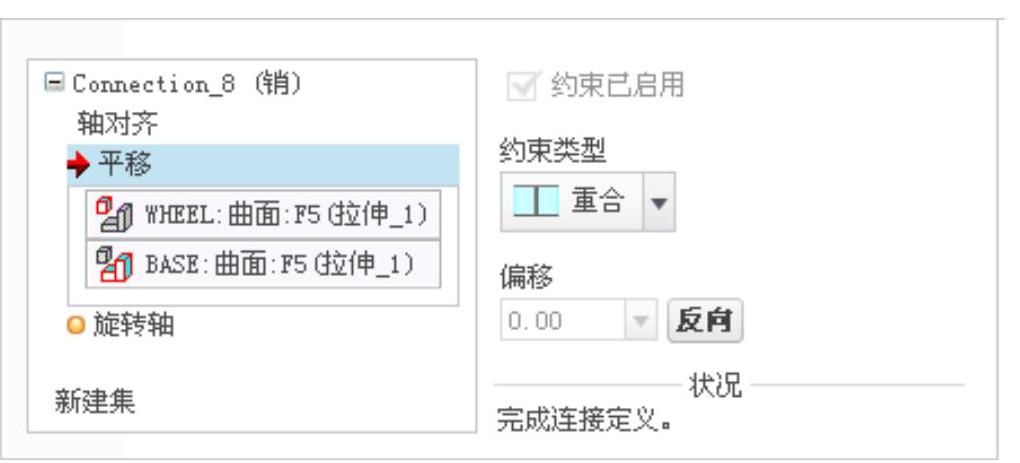
图9.5.30 定义“平移”约束
(4)调整元件wheel至图9.5.31所示的位置。
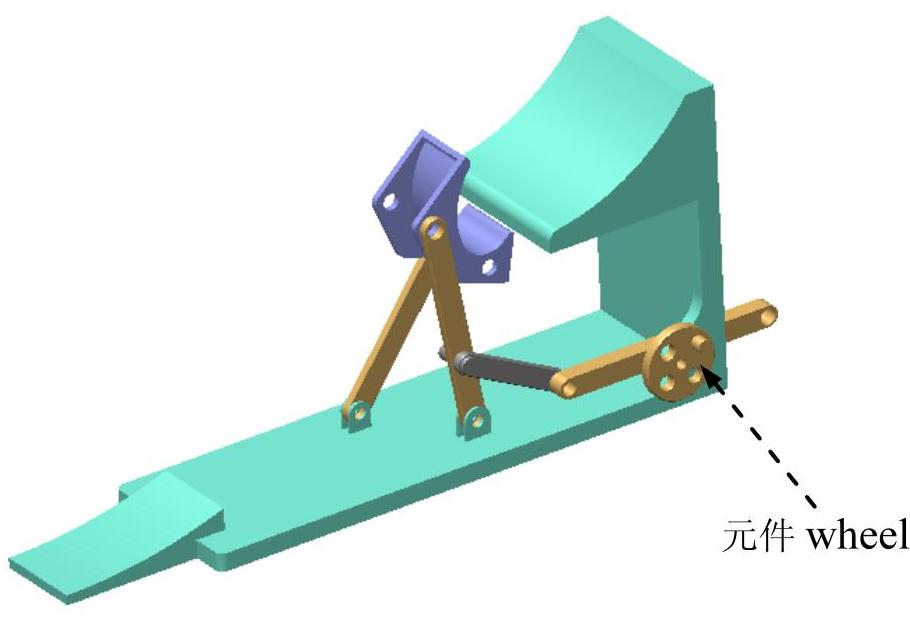
图9.5.31 调整模型位置
(5)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step16.引入元件link04.prt,并将其调整到图9.5.32所示的位置。
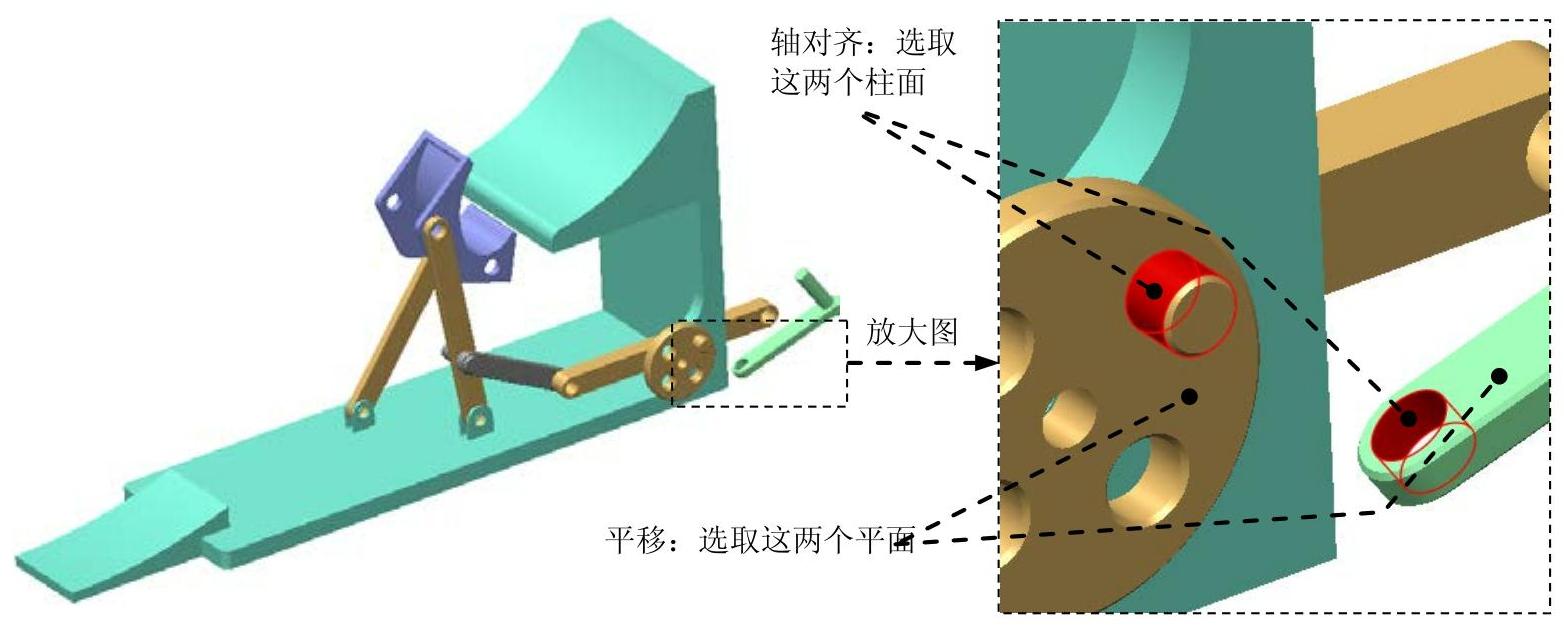
图9.5.32 创建“销(Pin)”连接
Step17.创建link04和wheel之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.32中的两个柱面为“轴对齐”约束参考,如图9.5.33所示。
按钮,分别选取图9.5.32中的两个柱面为“轴对齐”约束参考,如图9.5.33所示。
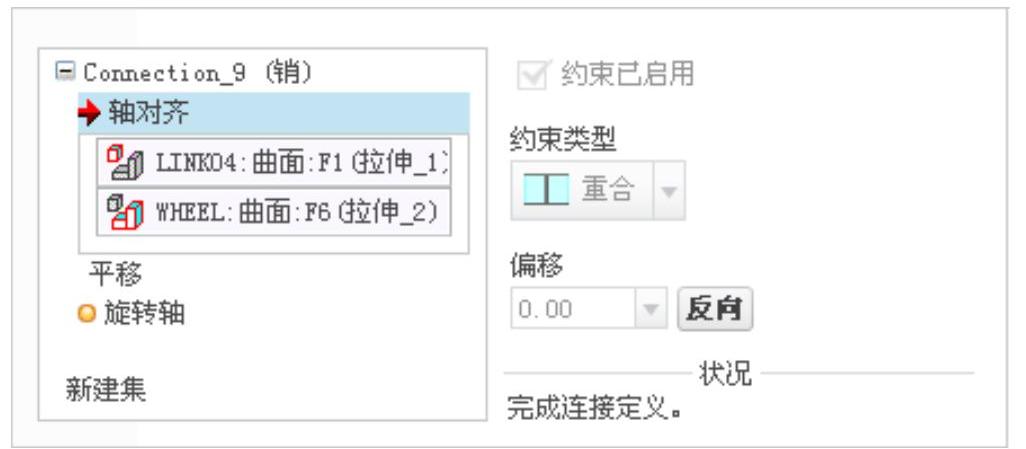
图9.5.33 定义“轴对齐”约束
(3)定义“平移”约束。分别选取图9.5.32中的两个平面为“平移”约束的参考,如图9.5.34所示。
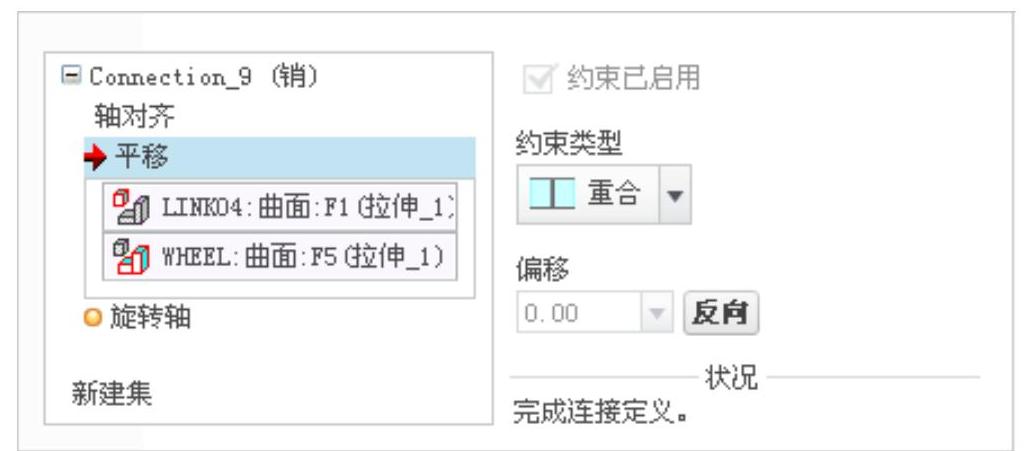
图9.5.34 定义“平移”约束
(4)调整元件link04至图9.5.35所示的位置。
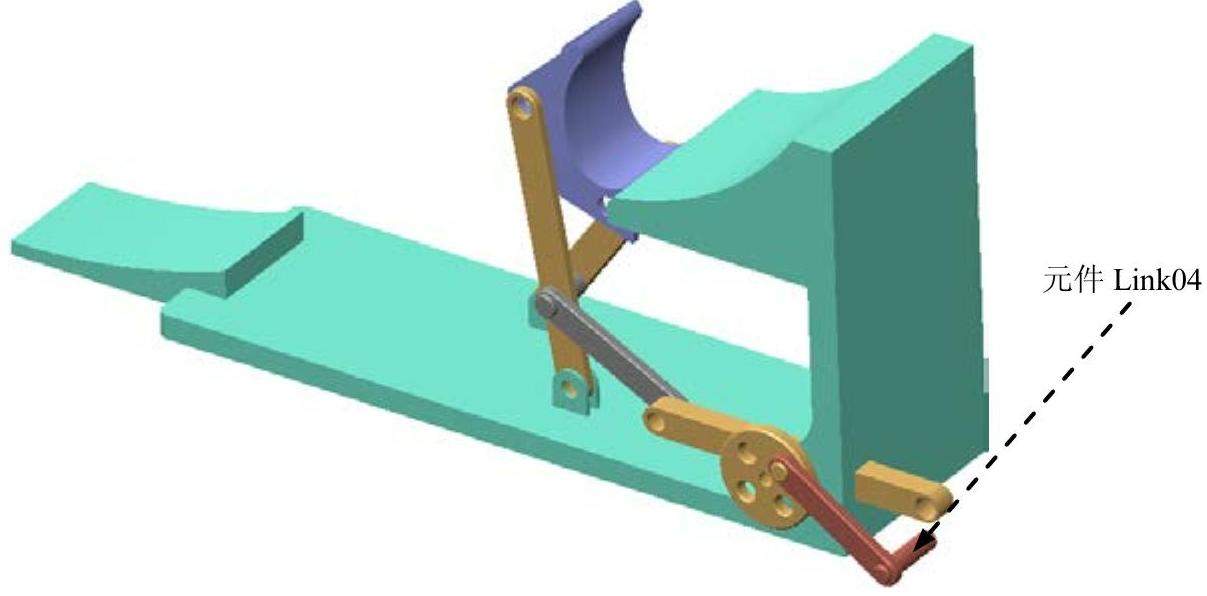
图9.5.35 调整模型位置
Step18.创建slider和link04之间的圆柱连接。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图9.5.36所示的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图9.5.36所示的两个柱面为“轴对齐”约束参考,此时 界面如图9.5.37所示。
界面如图9.5.37所示。
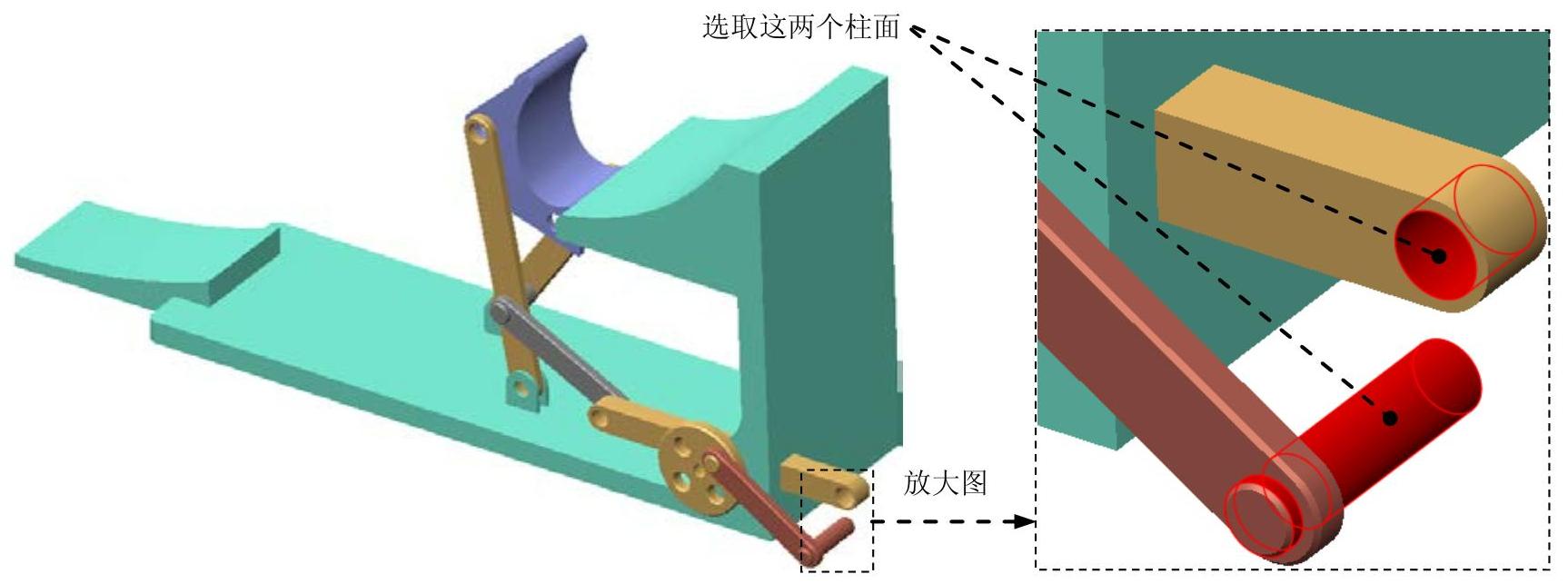
图9.5.36 创建圆柱(Cylinder)连接
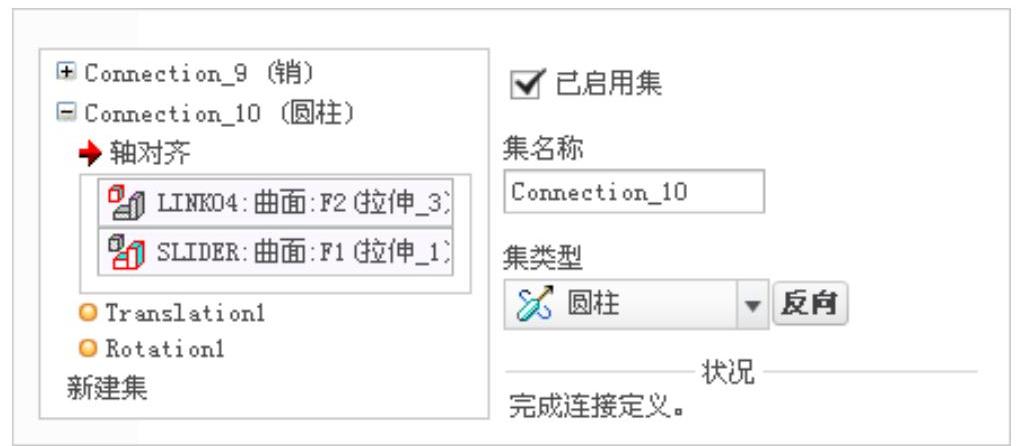
图9.5.37 “放置”界面
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step19.引入元件roller.prt。
Step20.创建roller和baset之间的平面连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“平面”约束。在模型树中选取rollerr中的基准平面DTM1和base中的基准平面FRONT为“平面”约束的参考,此时 界面如图9.5.38所示。
界面如图9.5.38所示。
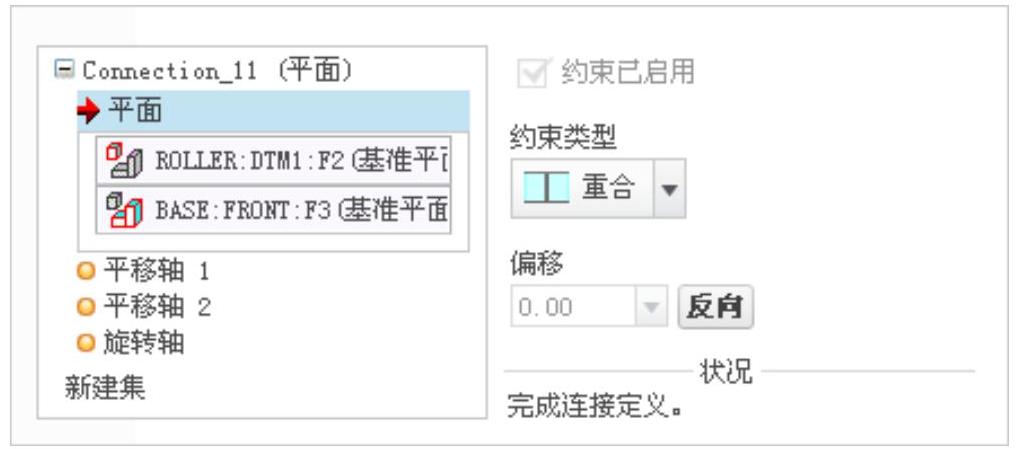
图9.5.38 “放置”界面
(3)将模型显示切换到FRONT视图,调整roll_part的位置大致如图9.5.39所示。
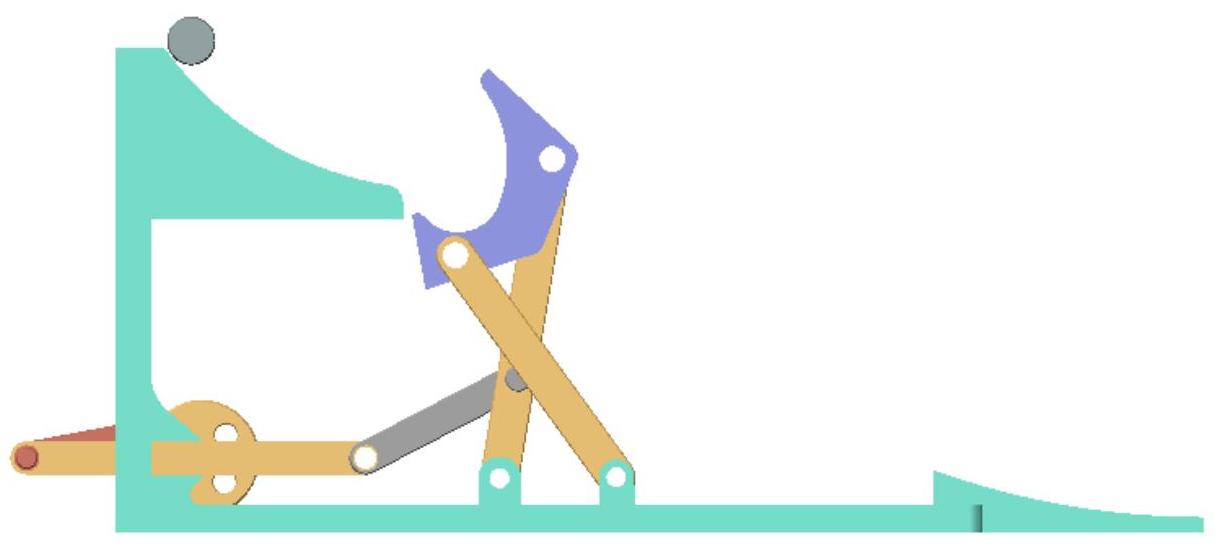
图9.5.39 调整模型位置
(4)单击操控板中的 按钮,完成平面连接的创建。
按钮,完成平面连接的创建。
Step21.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







