范例概述:
该模型模拟的是微型联轴器的运行状况,主要用到了机构连接和3D接触,如图7.5.1所示。在创建该机构模型时,一定要注意联轴器和花键之间不能出现关联性装配或机构约束,只能应用3D接触进行连接,并且3D接触需要间隔一个键齿进行设置,否则后面仿真会失败。读者可以打开视频文件D:\creo2.16\work\ch07\ch07.05\ok\COUPLING.mpg查看机构运行状况。
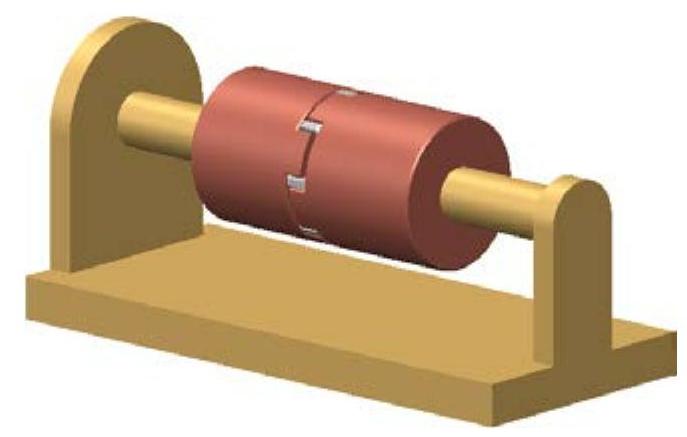
图7.5.1 机构模型
Step1.将工作目录设置至D:\creo2.16\work\ch07\ch07.05\。
Step2.新建文件。新建一个装配模型,命名为coupling_asm,选取 模板。
模板。
Step3.引入第一个元件base.prt,并使用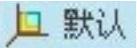 约束完全约束该元件。
约束完全约束该元件。
Step4.引入第二个元件coupling_01.prt,并将其调整到图7.5.2所示的位置。
图7.5.2 创建“销(Pin)”连接
Step5.创建coupling_01和base之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图7.5.2中的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图7.5.2中的两个柱面为“轴对齐”约束参考,此时 界面如图7.5.3所示。
界面如图7.5.3所示。
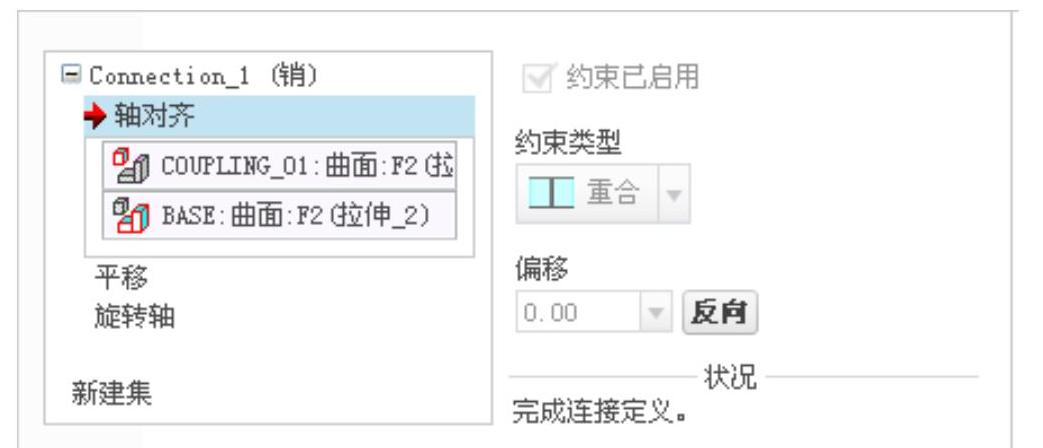
图7.5.3 “放置”界面
(3)定义“平移”约束。分别选取图7.5.2中的两个平面为“平移”约束的参考,此时 界面如图7.5.4所示。
界面如图7.5.4所示。
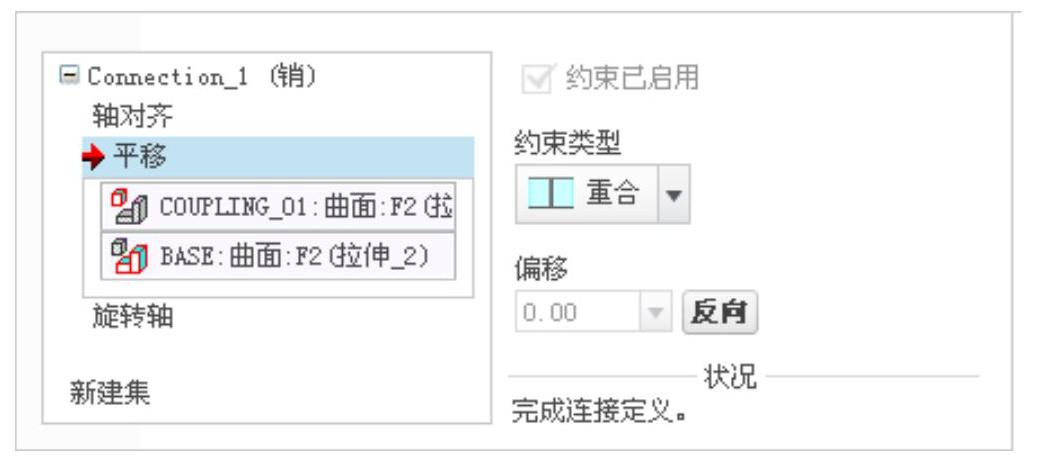
图7.5.4 “放置”界面
说明:在 界面中单击
界面中单击 按钮,可以反转轴对齐和面对齐的方向,如果单击
按钮,可以反转轴对齐和面对齐的方向,如果单击 按钮没有效果,可以预先将元件coupling_01调整到图7.5.5所示位置再进行约束。
按钮没有效果,可以预先将元件coupling_01调整到图7.5.5所示位置再进行约束。
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,在模型树中选取coupling_01中的基准平面DTM3和装配中的基准平面ASM_TOP为旋转轴参考。
选项,在模型树中选取coupling_01中的基准平面DTM3和装配中的基准平面ASM_TOP为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值0,并按Enter键确认;单击
区域下的文本框中输入值0,并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,如图7.5.6所示。
复选框,如图7.5.6所示。
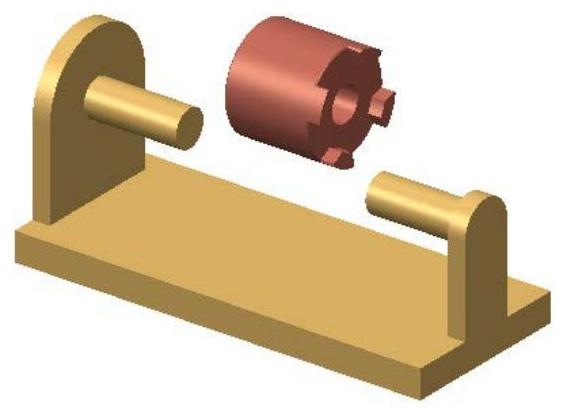
图7.5.5 调整元件位置
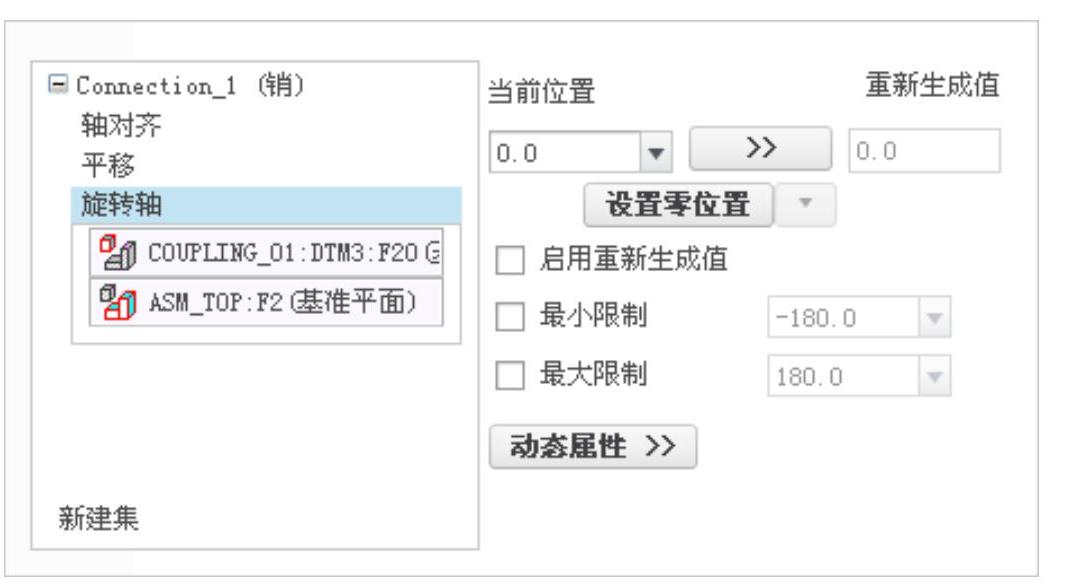
图7.5.6 设置位置参数
(6)单击操控板中的 按钮,完成销连接的创建。
按钮,完成销连接的创建。
Step6.引入元件coupling_02.prt,并将其调整到图7.5.7所示的位置。
Step7.创建coupling_02和base之间的销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图7.5.7中的两个柱面为“轴对齐”约束参考,此时
按钮,分别选取图7.5.7中的两个柱面为“轴对齐”约束参考,此时 界面如图7.5.8所示。
界面如图7.5.8所示。
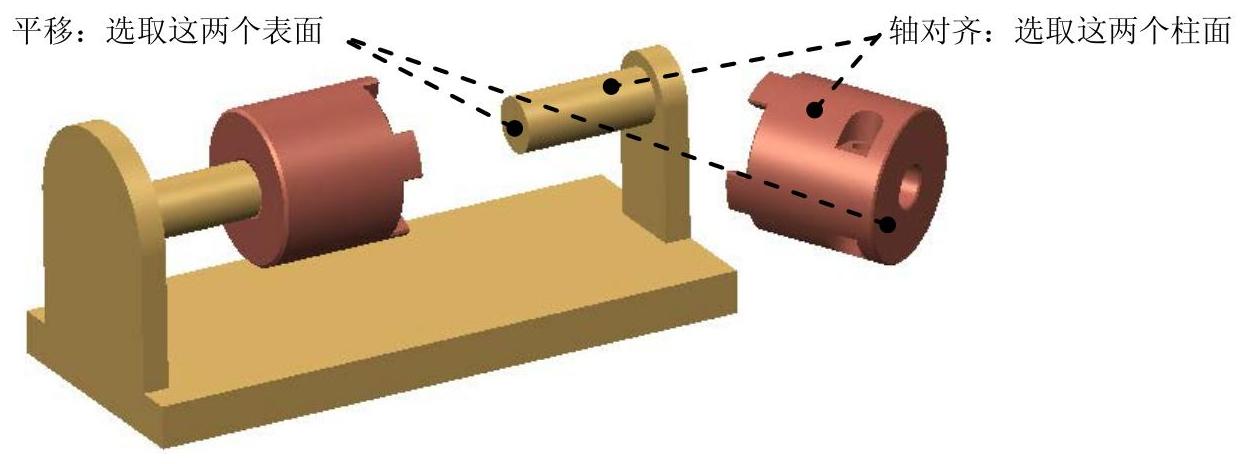
图7.5.7 创建“销(Pin)”连接
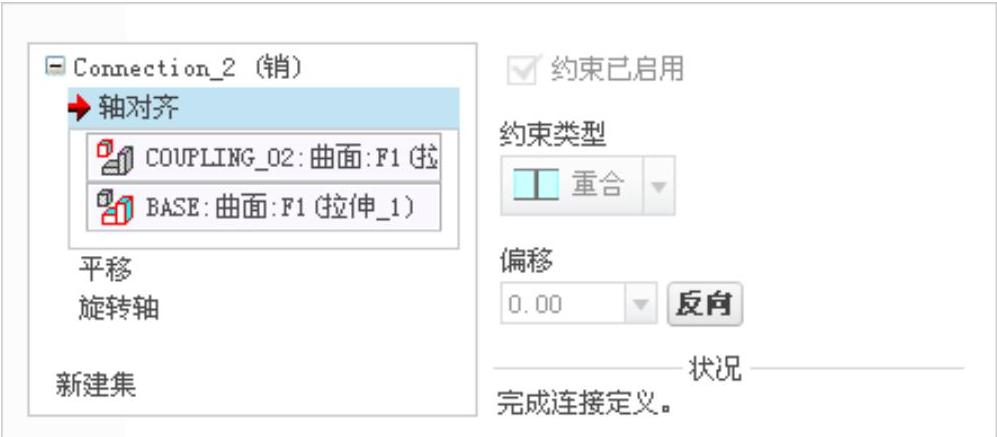
图7.5.8 “放置”界面
(3)定义“平移”约束。分别选取图7.5.7中的两个平面为“平移”约束的参考,此时 界面如图7.5.9所示。
界面如图7.5.9所示。
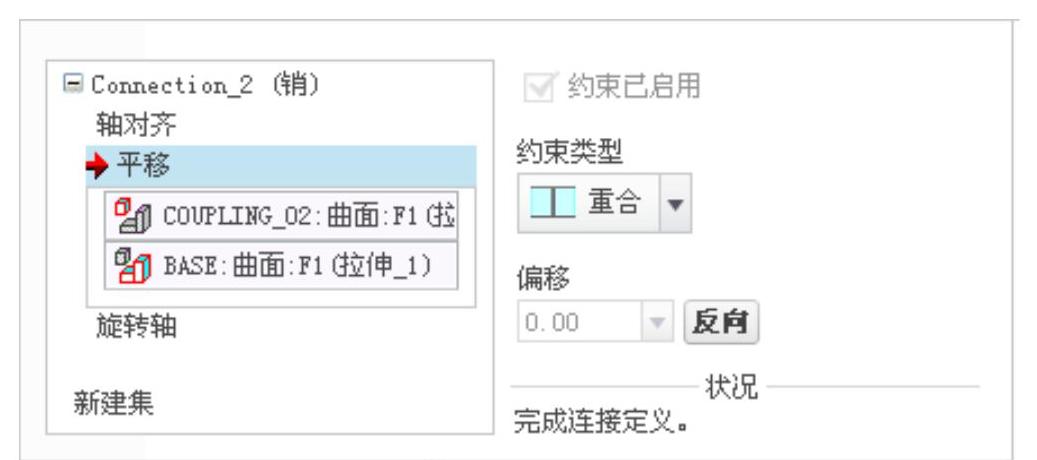
图7.5.9 “放置”界面
(4)设置旋转轴参考。在 界面中单击
界面中单击 选项,在模型树中选取coupling_02中的基准平面DTM3和装配中的基准平面ASM_TOP为旋转轴参考。
选项,在模型树中选取coupling_02中的基准平面DTM3和装配中的基准平面ASM_TOP为旋转轴参考。
(5)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值0,并按Enter键确认;单击
区域下的文本框中输入值0,并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,此时
复选框,此时 界面如图7.5.10所示。
界面如图7.5.10所示。
(6)单击操控板中的 按钮,完成销连接的创建。
按钮,完成销连接的创建。
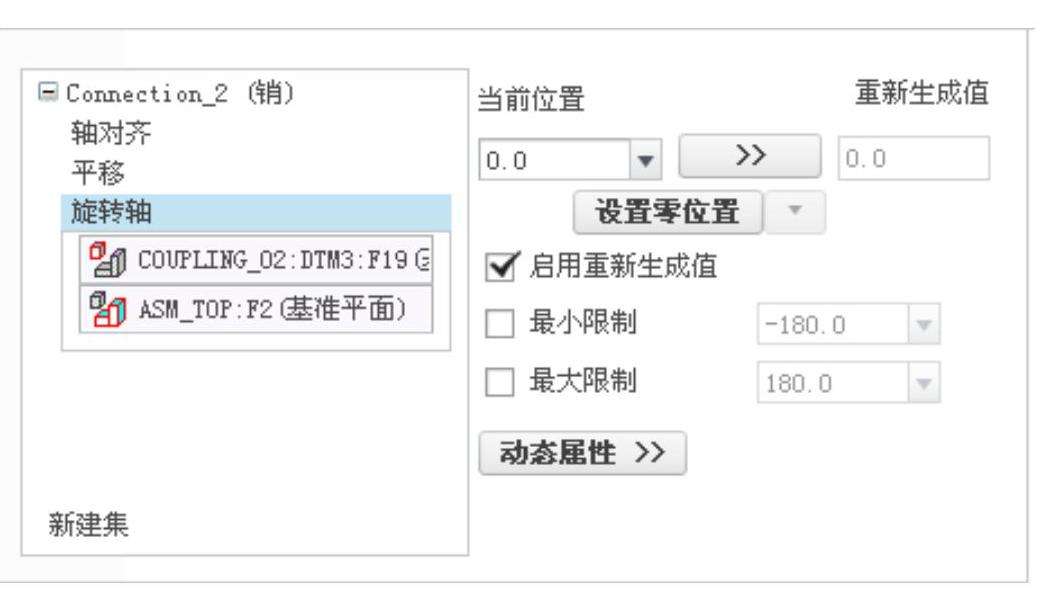
图7.5.10 “放置”界面
Step8.引入元件spline.prt,并将其调整到图7.5.11所示的位置。
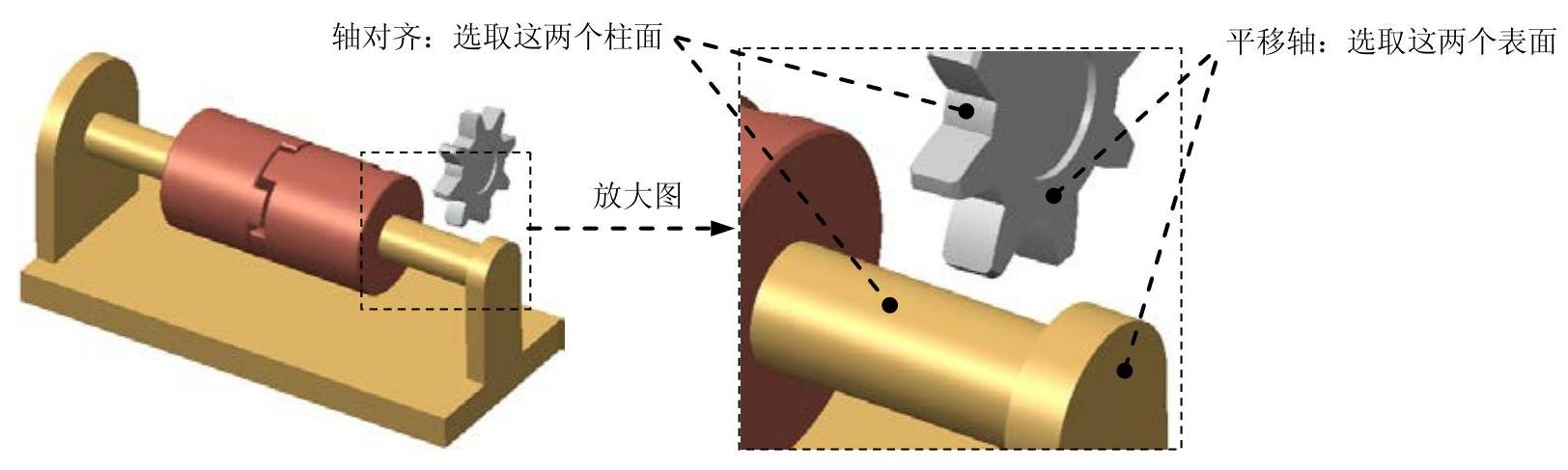
图7.5.11 创建圆柱(Cylinder)连接
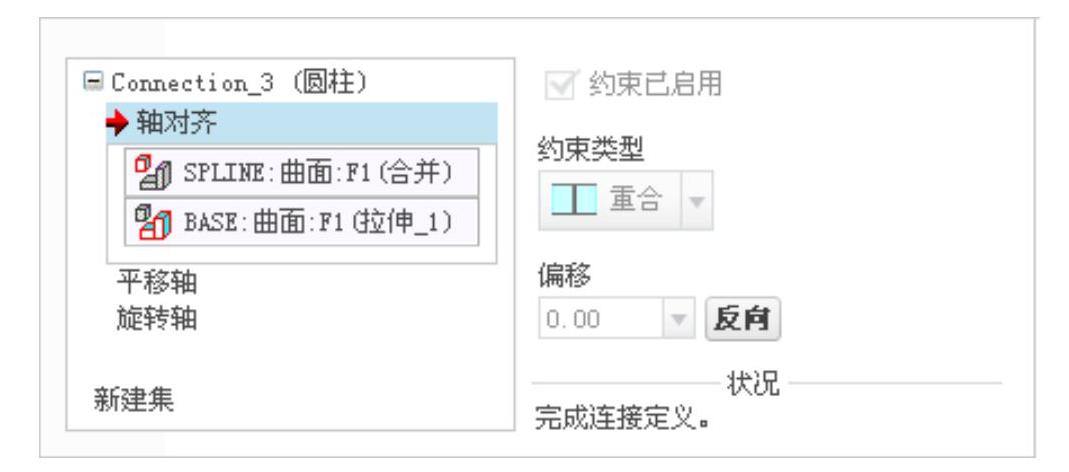
Step9.创建spline和base之间的圆柱连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“轴对齐”约束。分别选取图7.5.11所示的两个柱面为“轴对齐”约束参考,此时 界面如图7.5.12所示。
界面如图7.5.12所示。
 (www.daowen.com)
(www.daowen.com)
图7.5.12 “放置”界面
(3)设置平移轴参考。在 界面中单击
界面中单击 选项,选取图7.5.11所示的两个平面为平移轴参考。
选项,选取图7.5.11所示的两个平面为平移轴参考。
(4)设置平移轴位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值300.5(如果方向相反则为负值),并按Enter键确认;单击
区域下的文本框中输入值300.5(如果方向相反则为负值),并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,此时
复选框,此时 界面如图7.5.13所示。
界面如图7.5.13所示。
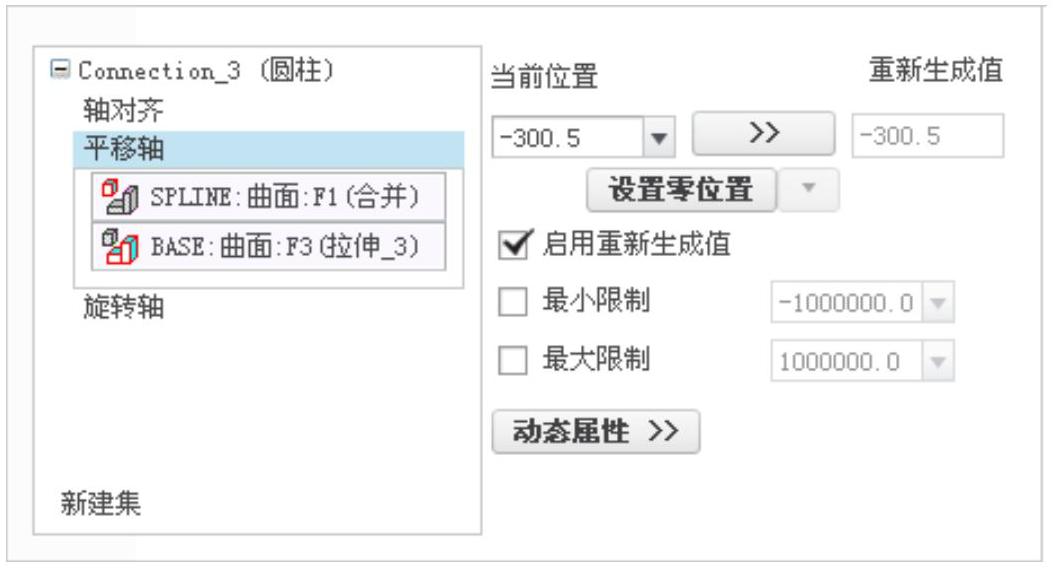
图7.5.13 “放置”界面
(5)设置旋转轴参考。在 界面中单击
界面中单击 选项,在模型树中选取spline中的基准平面DTM1和装配中的基准平面ASM_TOP为旋转轴参考。
选项,在模型树中选取spline中的基准平面DTM1和装配中的基准平面ASM_TOP为旋转轴参考。
(6)设置位置参数。在 界面右侧
界面右侧 区域下的文本框中输入值90,并按Enter键确认;单击
区域下的文本框中输入值90,并按Enter键确认;单击 按钮,选中
按钮,选中 复选框,此时
复选框,此时 界面如图7.5.14所示。
界面如图7.5.14所示。
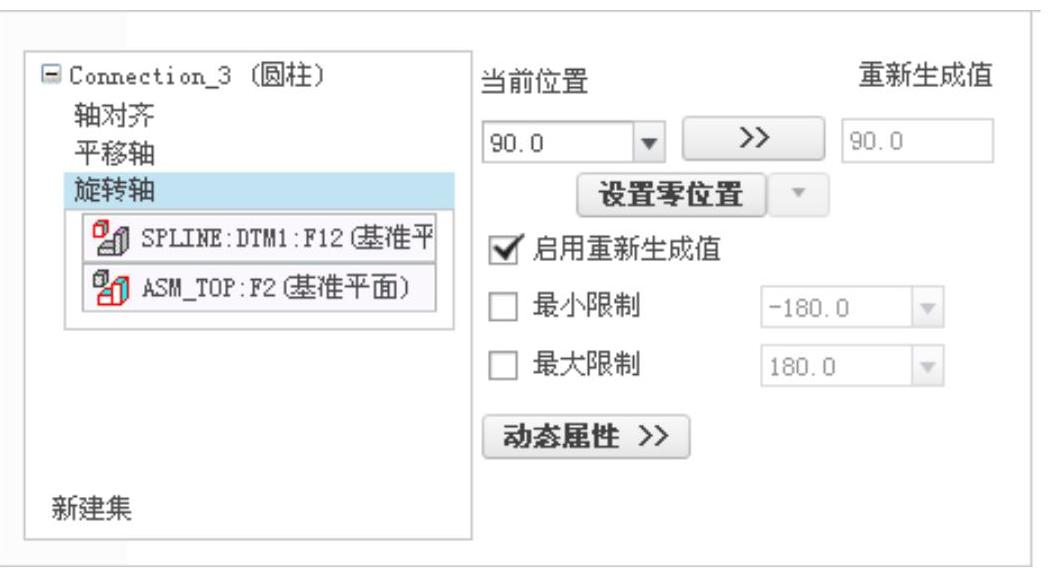
图7.5.14 “放置”界面
(7)单击操控板中的 按钮,完成圆柱连接的创建。
按钮,完成圆柱连接的创建。
Step10.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step11.定义3D接触1。
(1)选择命令。单击 功能选项卡
功能选项卡 区域中的“3D接触”按钮
区域中的“3D接触”按钮 ,系统弹出“3D接触”操控板。
,系统弹出“3D接触”操控板。
(2)选取参考对象。按住Ctrl键,在机构中选依次取图7.5.15所示的曲面1和曲面2为参考对象。
(3)单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
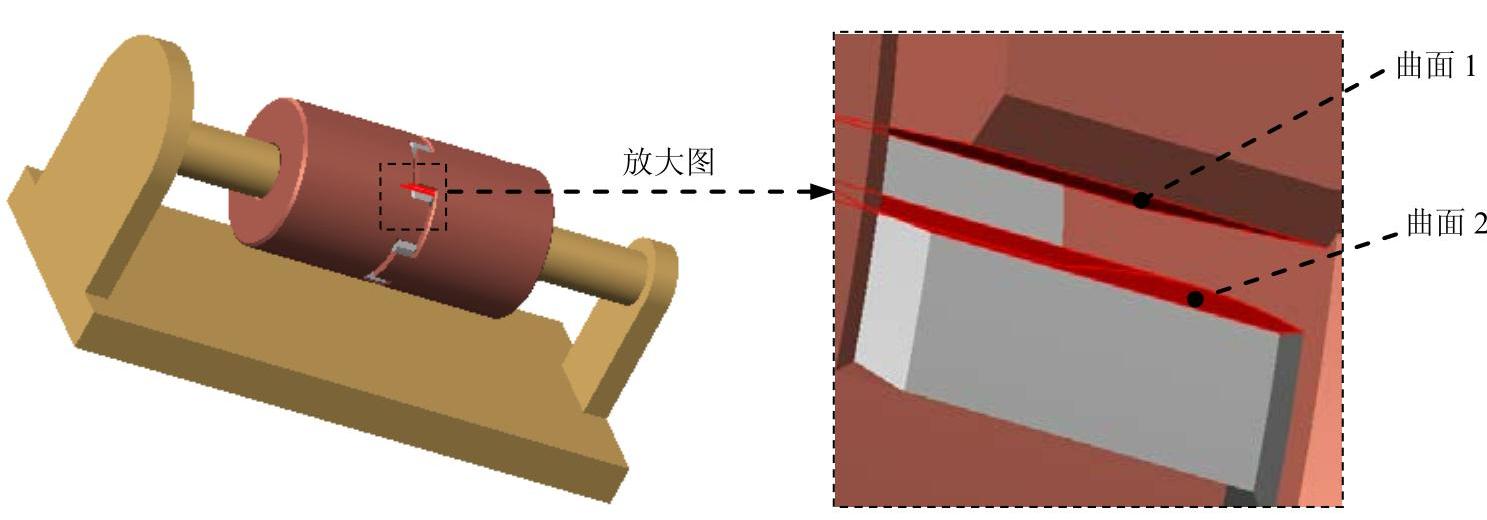
图7.5.15 选取参考对象
说明:如果无法直接选取曲面1和曲面2,可以将模型切换到线框显示状态,采用“在列表中选取”的方法进行选取;也可以将花键元件拖移一定的角度进行选取,但是选取完成后需要再生模型。
Step12.定义3D接触2。参考操作步骤Step11,依次取图7.5.16所示的曲面3和曲面4为参考对象定义3D接触2。
图7.5.16 选取参考对象
Step13.定义伺服电动机。
(1)选择命令。单击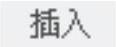 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,系统弹出“伺服电动机定义”对话框。
,系统弹出“伺服电动机定义”对话框。
(2)选取参考对象。选取图7.5.17所示的连接为参考对象。
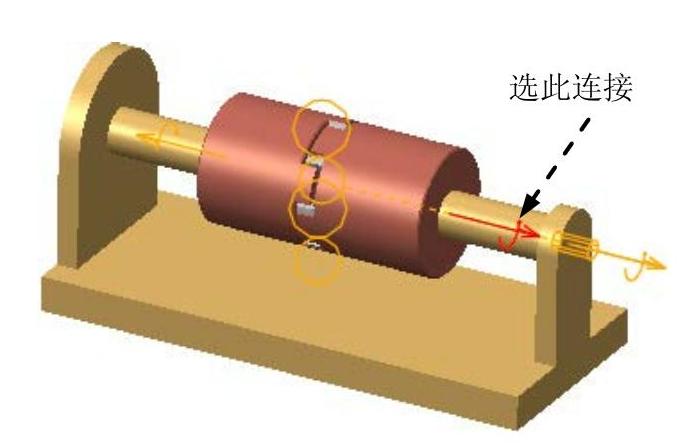
图7.5.17 选取参考对象
(3)设置轮廓参数。单击“伺服电动机定义”对话框中 选项卡,在“定义运动轴设置”按钮
选项卡,在“定义运动轴设置”按钮 右侧的下拉列表中选择
右侧的下拉列表中选择 选项,在“模”下拉列表中选择
选项,在“模”下拉列表中选择 选项,设置A=45。
选项,设置A=45。
(4)单击对话框中的 按钮,完成伺服电动机的定义。
按钮,完成伺服电动机的定义。
Step14.设置初始位置。
(1)选择拖动命令。单击 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,系统弹出“拖动”对话框。
,系统弹出“拖动”对话框。
(2)记录快照1。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照1(Snapshot1)。
按钮,即可记录当前位置为快照1(Snapshot1)。
(3)单击 按钮,关闭“拖动”对话框。
按钮,关闭“拖动”对话框。
Step15.定义机构分析。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
(2)定义初始配置。在 区域中选择
区域中选择 单选项。
单选项。
(3)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况。
按钮,查看机构的运行状况。
(4)完成运动分析。单击 完成运动分析。
完成运动分析。
Step16.保存回放结果。
(1)单击 功能选项卡
功能选项卡 区域中的“回放”按钮
区域中的“回放”按钮 ,系统弹出“回放”对话框。
,系统弹出“回放”对话框。
(2)在“回放”对话框中单击“保存”按钮 ,系统弹出“保存分析结果”对话框,采用默认的名称,单击
,系统弹出“保存分析结果”对话框,采用默认的名称,单击 按钮,即可保存仿真结果。
按钮,即可保存仿真结果。
Step17.输出视频。
(1)单击“回放”对话框中的“播放当前结果集”按钮 ,系统弹出“动画”对话框,
,系统弹出“动画”对话框,
(2)单击“回放”对话框中的“录制动画为MPEG文件”按钮 ,系统弹出“捕获”对话框,单击
,系统弹出“捕获”对话框,单击 按钮,机构开始运行输出视频文件。
按钮,机构开始运行输出视频文件。
(3)在工作目录中播放视频文件“COUPLING.mpg”查看结果。
(4)单击“动画”对话框中的 按钮,返回到“回放”对话框,单击其中的
按钮,返回到“回放”对话框,单击其中的 按钮关闭对话框。
按钮关闭对话框。
Step18.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step19.保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







