静态分析主要分析机构达到平衡状态时的受力状况。当机构受到重力和其他载荷作用时,使用静态分析可以快速地得到机构的平衡状态,由于在进行静态分析时系统不考虑速度,所以静态分析能比动态分析更快地分析出机构的平衡状态。运行静态分析时,系统会显示加速度迭代图形,显示机构的最大加速度,在分析过程中模型位置和图形都会发生变化,当机构达到平衡状态时,图形中的最大加速度将显示为0。
下面举例说明定义静态分析的操作过程。在图6.5.1所示的机构中,首先将模拟机构在空载状态下,由于自身重力和弹簧的影响达到平衡状态,然后再施加一个点力载荷,模拟机构在有载荷的情况下达到平衡状态。
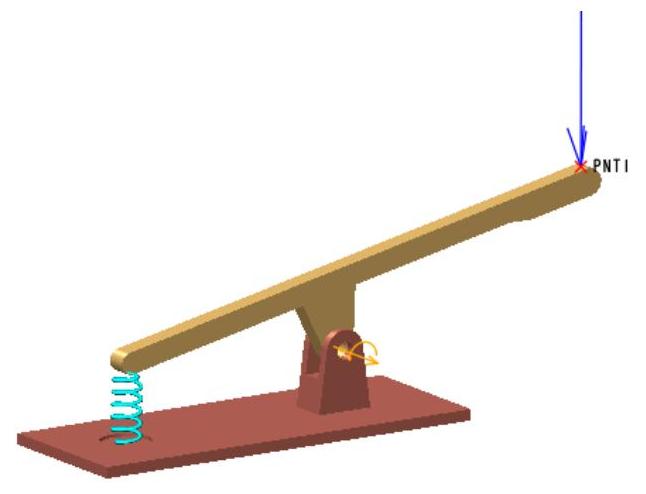
图6.5.1 机构模型
Step1.将工作目录设置至D:\creo2.16\work\ch06\ch06.05\。
Step2.新建文件。新建一个装配模型,命名为Static_asm,选取 模板。
模板。
Step3.引入第一个元件base.prt,并使用 约束完全约束该元件。
约束完全约束该元件。
Step4.引入第二个元件rod.prt,并将其调整到图6.5.1所示的位置。
Step5.创建销连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图6.5.2中的两个轴线为“轴对齐”约束参考,此时
按钮,分别选取图6.5.2中的两个轴线为“轴对齐”约束参考,此时 界面如图6.5.3所示。
界面如图6.5.3所示。
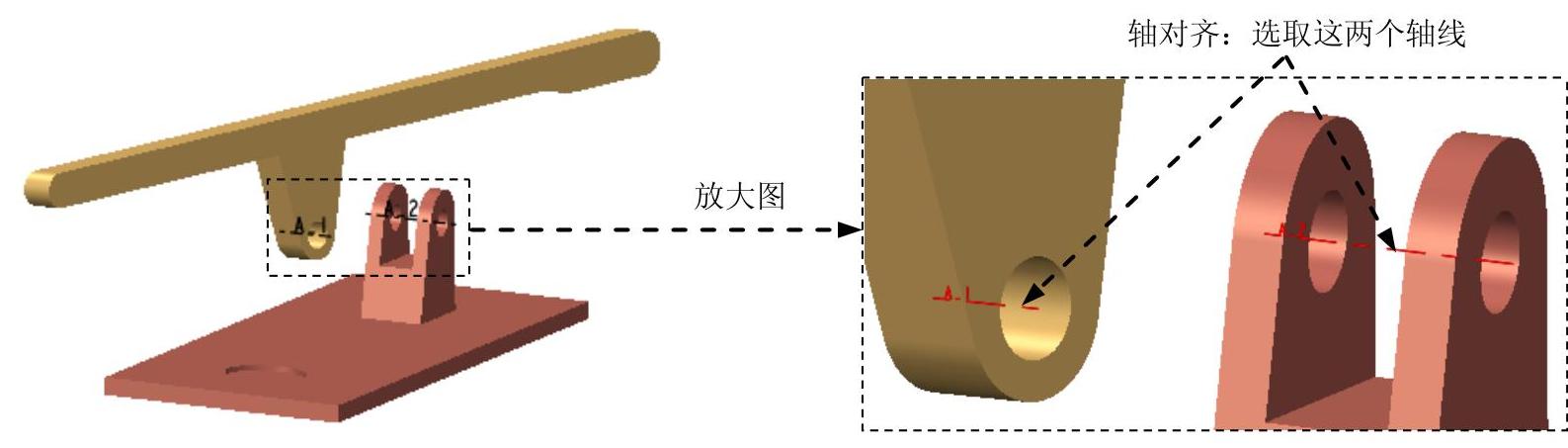
图6.5.2 创建“销(Pin)”连接
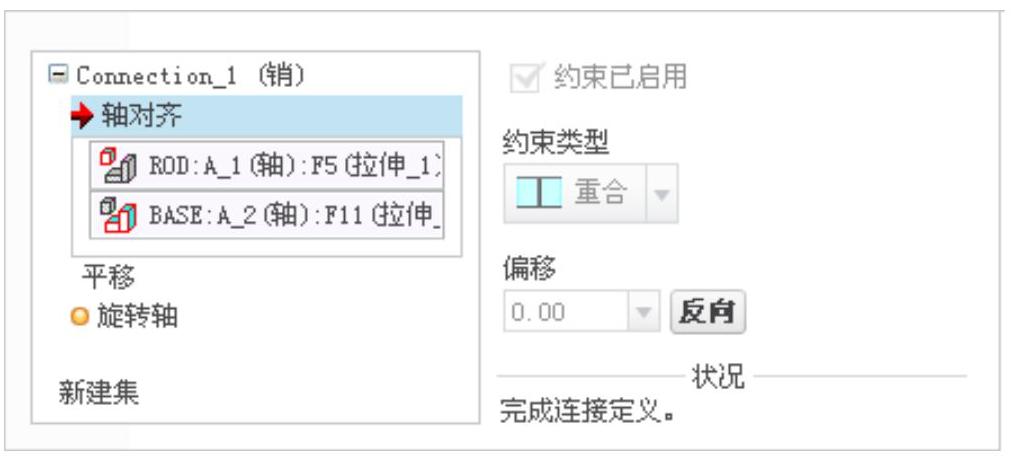
图6.5.3 “放置”界面
(3)定义“平移”约束。在模型树中分别选取base和rod中的TOP基准平面为约束参考,此时 界面如图6.5.4所示。
界面如图6.5.4所示。
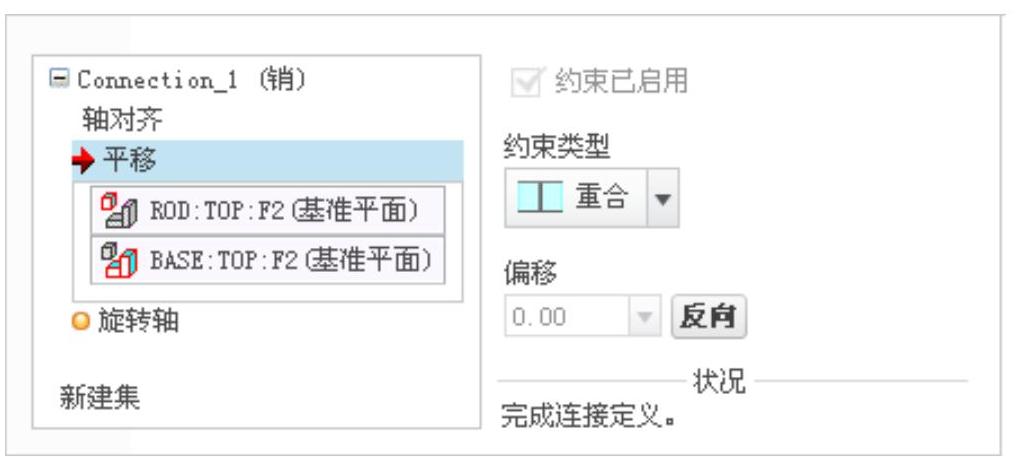
图6.5.4 “放置”界面
(4)单击操控板中的 按钮,完成销连接的创建,如图6.5.5所示。
按钮,完成销连接的创建,如图6.5.5所示。
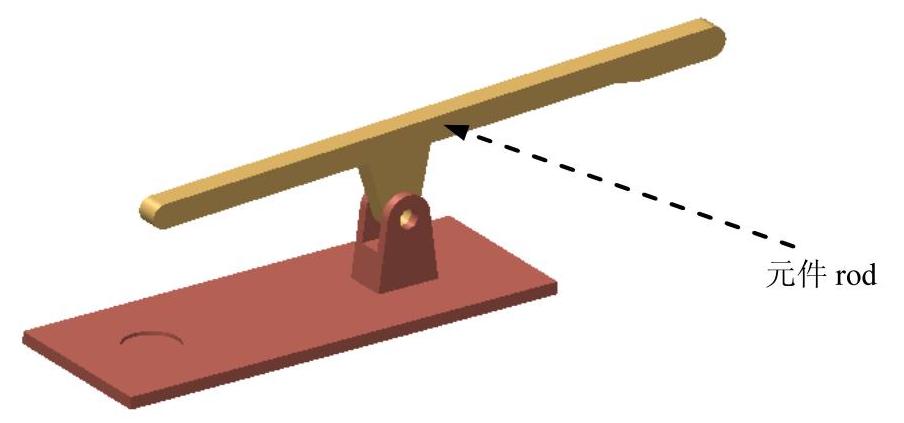
图6.5.5 完成机构装配
Step6.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step7.定义弹簧。
(1)选择命令。单击 区域中的“弹簧”按钮
区域中的“弹簧”按钮 ,系统弹出“弹簧”操控板。
,系统弹出“弹簧”操控板。
(2)定义弹簧类型。在操控板中按下“延伸/压缩弹簧”按钮 。
。
(3)选取参考对象。在操控板中单击 按钮,按住Ctrl键,选取图6.5.6所示的两个基准点为参考对象。
按钮,按住Ctrl键,选取图6.5.6所示的两个基准点为参考对象。
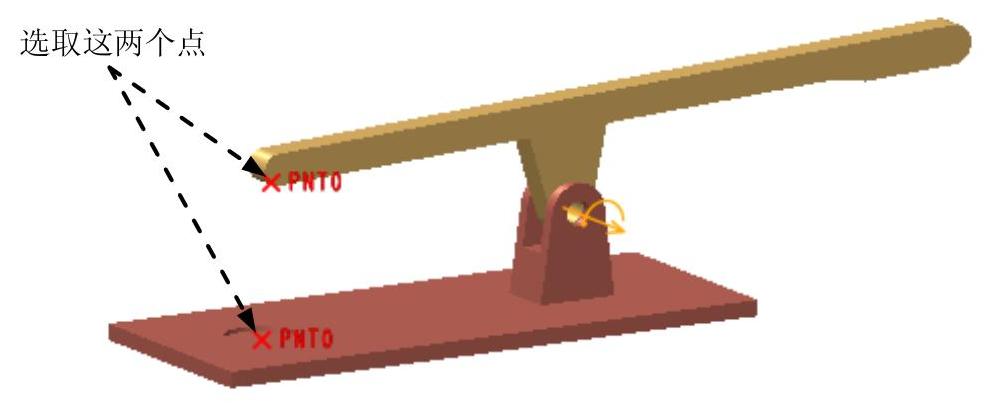
图6.5.6 选取参考对象
(4)定义弹簧直径。在操控板中单击 按钮,选中其中的
按钮,选中其中的 复选框,输入弹簧的直径25,单位为mm。
复选框,输入弹簧的直径25,单位为mm。
(5)定义弹簧参数。在操控板的 文本框中输入弹簧系数30,单位为N/mm;在操控板的
文本框中输入弹簧系数30,单位为N/mm;在操控板的 文本框中输入弹簧的原始长度值65,单位为mm,此时弹簧显示如图6.5.7所示。
文本框中输入弹簧的原始长度值65,单位为mm,此时弹簧显示如图6.5.7所示。
(6)单击操控板中的 按钮,完成弹簧的定义。
按钮,完成弹簧的定义。
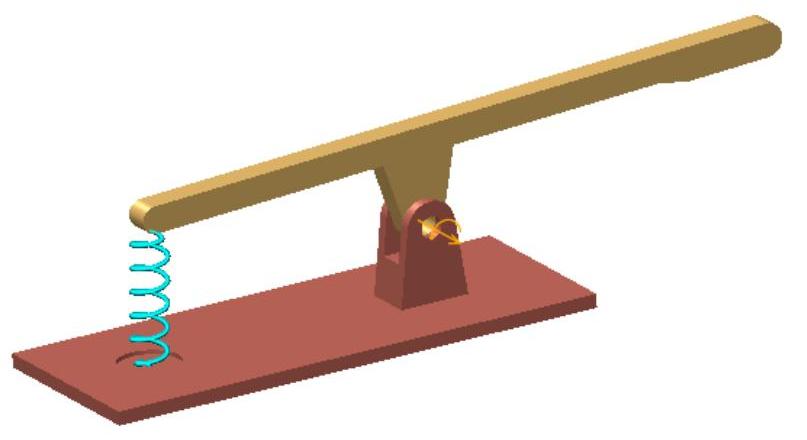
图6.5.7 定义弹簧参数
Step8.设置初始位置1。
(1)选择拖动命令。单击 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,系统弹出“拖动”对话框。
,系统弹出“拖动”对话框。
(2)拖动机构。拖动机构中的rod到图6.5.7所示的近似位置。
(3)记录快照1。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照1(Snapshot1)。
按钮,即可记录当前位置为快照1(Snapshot1)。
(4)单击 按钮,关闭“拖动”对话框。
按钮,关闭“拖动”对话框。
Step9.设置重力。
(1)选择命令。单击 区域中的“重力”按钮
区域中的“重力”按钮 ,系统弹出“重力”对话框。
,系统弹出“重力”对话框。
(2)设置重力方向。在 区域中设置X=0,Y=0,Z=1,分别按Enter键确认,此时重力方向如图6.5.8所示。
区域中设置X=0,Y=0,Z=1,分别按Enter键确认,此时重力方向如图6.5.8所示。
(3)单击 按钮,完成重力的设置。
按钮,完成重力的设置。
 (www.daowen.com)
(www.daowen.com)
图6.5.8 重力方向
Step10.定义静态分析1。本次分析将模拟机构在重力和弹簧的作用下达到平衡状态。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出图6.5.9所示的“分析定义”对话框。
,系统弹出图6.5.9所示的“分析定义”对话框。
(2)定义分析类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义初始配置。在 区域中选择
区域中选择 单选项。
单选项。
(4)定义分析步距。在 取消选中
取消选中 复选框,在其后的文本框中输入值0.01。
复选框,在其后的文本框中输入值0.01。
(5)定义外部载荷。单击 选项卡,选中
选项卡,选中 复选框。
复选框。
(6)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况。此时机构逐渐达到平衡状态,并显示图6.5.10所示的“图形工具”对话框,该对话框中显示了加速度迭代图形。
按钮,查看机构的运行状况。此时机构逐渐达到平衡状态,并显示图6.5.10所示的“图形工具”对话框,该对话框中显示了加速度迭代图形。
(7)单击 完成运动分析,关闭“图形工具”对话框。
完成运动分析,关闭“图形工具”对话框。

图6.5.9 “分析定义”对话框
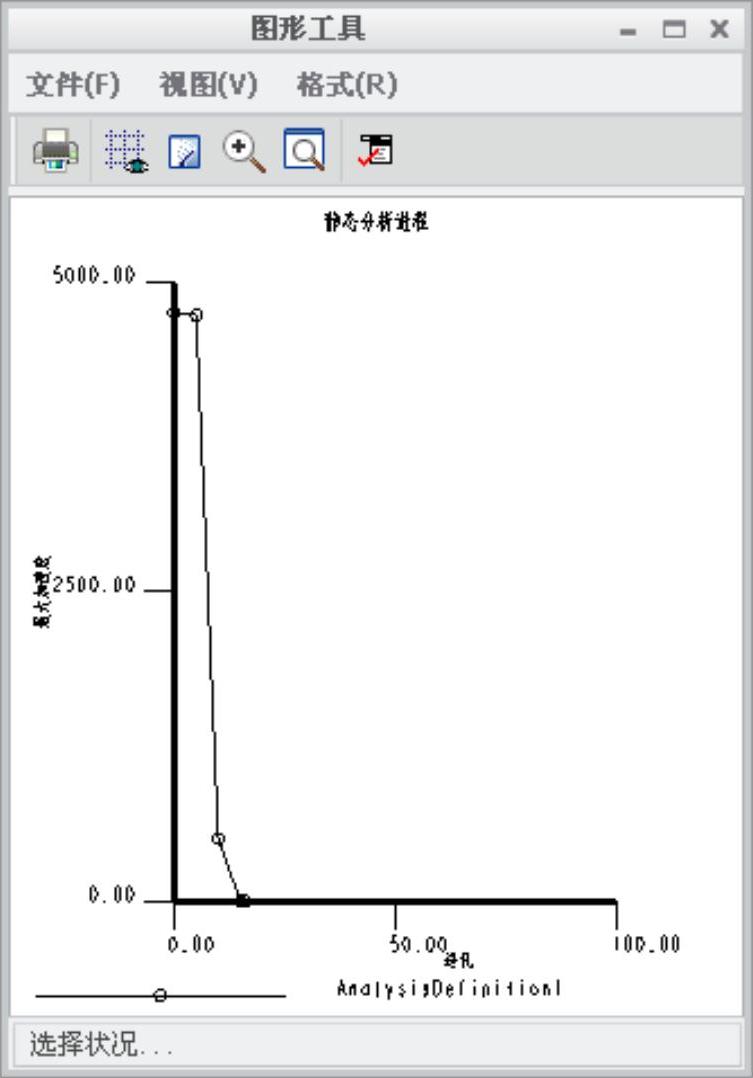
图6.5.10 “图形工具”对话框
Step11.设置初始位置2。
(1)选择拖动命令。单击 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,系统弹出“拖动”对话框。
,系统弹出“拖动”对话框。
(2)记录快照2。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照2(Snapshot2)。
按钮,即可记录当前位置为快照2(Snapshot2)。
(3)单击 按钮,关闭“拖动”对话框。
按钮,关闭“拖动”对话框。
Step12.在机构中添加一个点力作为外部载荷。
(1)选择命令。在 功能选项卡中单击
功能选项卡中单击 区域中的“力/扭矩”按钮
区域中的“力/扭矩”按钮 ,系统弹出“力/扭矩定义”对话框。
,系统弹出“力/扭矩定义”对话框。
(2)定义力的类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义力的位置参考。在机构中选择图6.5.11所示的基准点为力的位置参考。
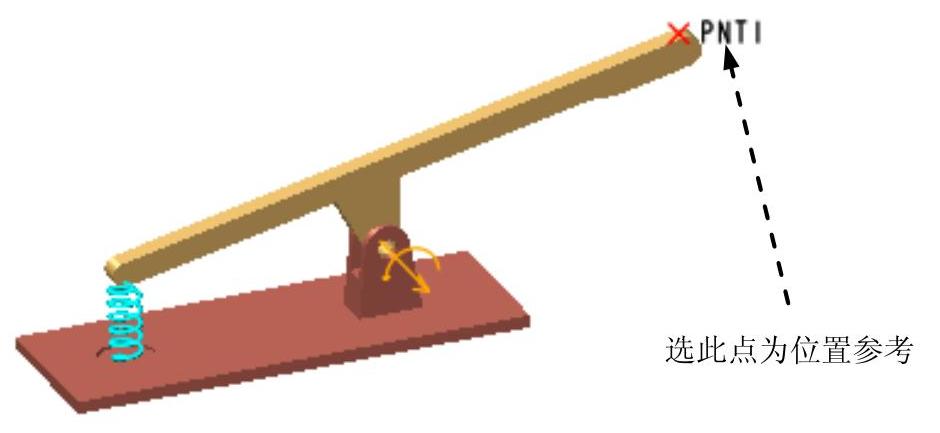
图6.5.11 选取参考对象
(4)定义力的大小。在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 文本框中输入值600,单击图形按钮
文本框中输入值600,单击图形按钮 ,系统将显示该力的轮廓图。
,系统将显示该力的轮廓图。
(5)定义力的方向。在对话框中单击 选项卡,在该选项卡采用图6.5.12所示的设置来定义方向。
选项卡,在该选项卡采用图6.5.12所示的设置来定义方向。
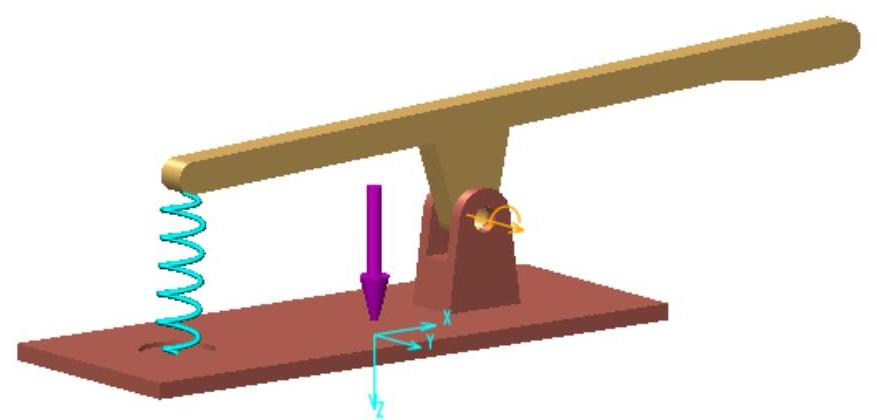
(6)单击对话框中的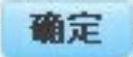 按钮,完成力的定义,如图6.5.13所示。
按钮,完成力的定义,如图6.5.13所示。
图6.5.12 方向定义界面
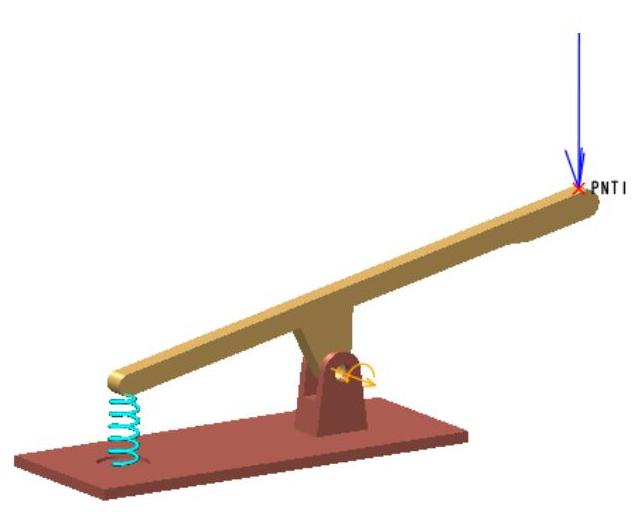
图6.5.13 定义力
Step13定义静态分析2。本次分析将模拟机构在重力、弹簧和外部载荷的作用下达到平衡状态。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
(2)定义分析类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义初始配置。在 区域中选择
区域中选择 单选项,并在其后的下拉列表中选择快照“Snapshot2”。
单选项,并在其后的下拉列表中选择快照“Snapshot2”。
(4)定义分析步距。在 取消选中
取消选中 复选框,在其后的文本框中输入值0.01。
复选框,在其后的文本框中输入值0.01。
(5)定义外部载荷。单击 选项卡,选中
选项卡,选中 复选框。
复选框。
(6)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况。此时机构逐渐达到平衡状态,并显示图6.5.14所示的“图形工具”对话框,该对话框中显示了加速度迭代图形。
按钮,查看机构的运行状况。此时机构逐渐达到平衡状态,并显示图6.5.14所示的“图形工具”对话框,该对话框中显示了加速度迭代图形。
(7)单击 完成运动分析,关闭“图形工具”对话框。
完成运动分析,关闭“图形工具”对话框。
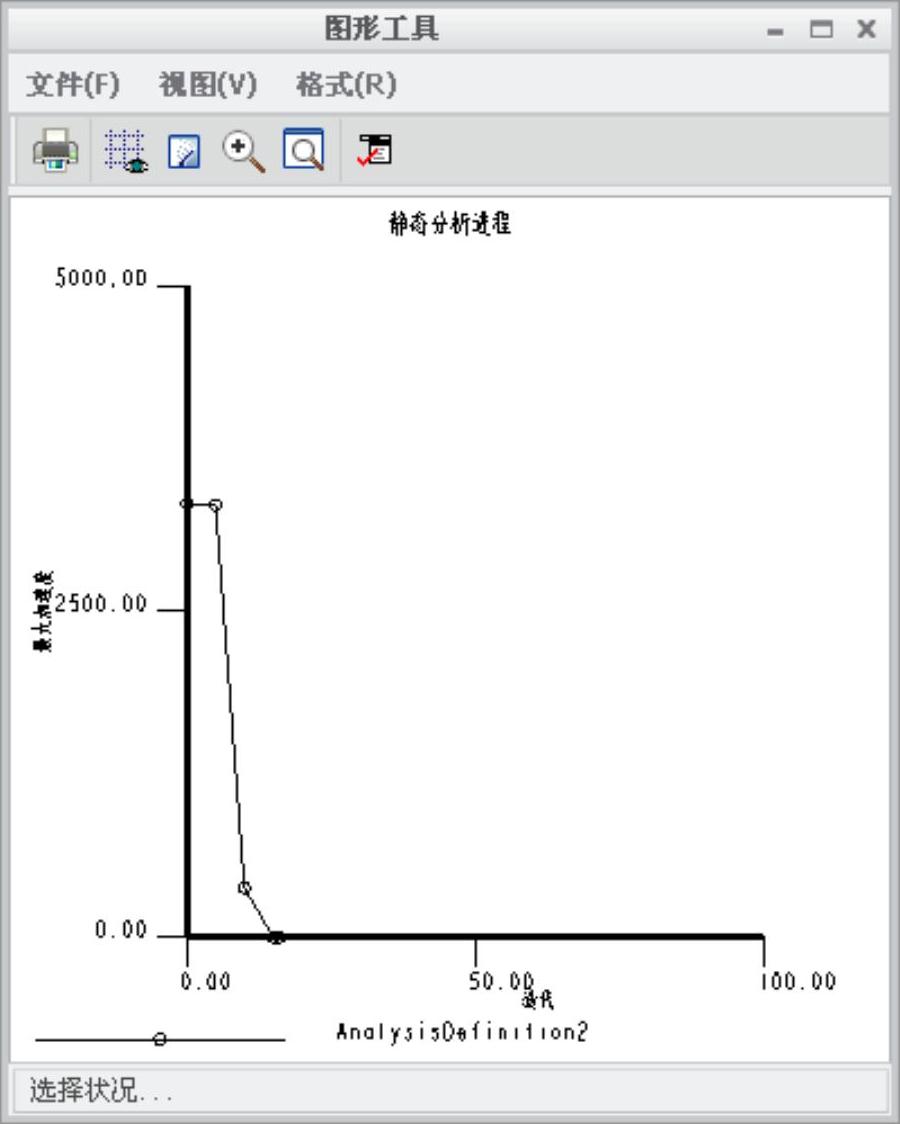
图6.5.14 “图形工具”对话框
Step14.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step15.保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






