当机构模型创建完成并定义伺服电动机后,便可以对机构进行分析。定义机构分析时,可以根据机构的实际运行状况,添加电动机、力/扭矩、重力和摩擦等分析条件。如果只是单纯地模拟机构运行状况,分析机构运动时的干涉,一般的位置分析即可达到目的。但是当需要分析研究机构中的速度、加速度,静负荷以及其他力学对象时,则需要进行运动分析、动态分析、静态分析和力平衡分析。对于一个机构,可以建立多组分析,每组分析可以使用不同的伺服电动机和分析环境,分析结果也能单独保存。如果不同的分析涉及不同的机构主体,可以将当前分析中无用的主体锁定,不需要建立单独的机构模型。
单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出图6.1.1所示的“分析定义”对话框。下面简要说明各种分析类型的应用。
,系统弹出图6.1.1所示的“分析定义”对话框。下面简要说明各种分析类型的应用。
●位置:使用位置分析模拟机构的运动,可以记录在机构中所有连接的约束下各元件的位置数据,分析时可以不考虑重力、质量和摩擦等因素,因此只要元件连接正确,并定义伺服电动机便可以进行位置分析。位置分析可以研究机构中的元件随时间而运动的位置、元件干涉和机构运动的轨迹曲线。
●运动学:使用运动学分析模拟机构的运动,可以是使用具有特定轮廓,并产生有限加速度的伺服电动机。同位置分析一样,机构中的弹簧、阻尼器、重力、力/力矩以及执行电动机等均不会影响运动分析。运动分析除了可以研究机构中的元件随时间而运动的位置、元件干涉和机构运动的轨迹曲线外,还能研究机构中的速度和加速度参数。
●动态:使用动态分析可研究作用于机构中各主体上的惯性力、重力和外力之间的关系。
●静态:使用静态分析可研究作用在已达到平衡状态的主体上的力。
●力平衡:力平衡分析是一种逆向的静态分析。在力平衡分析中,是从具体的静态形态获得所施加的作用力,而在静态分析中,是向机构施加力来获得静态形态。(https://www.daowen.com)
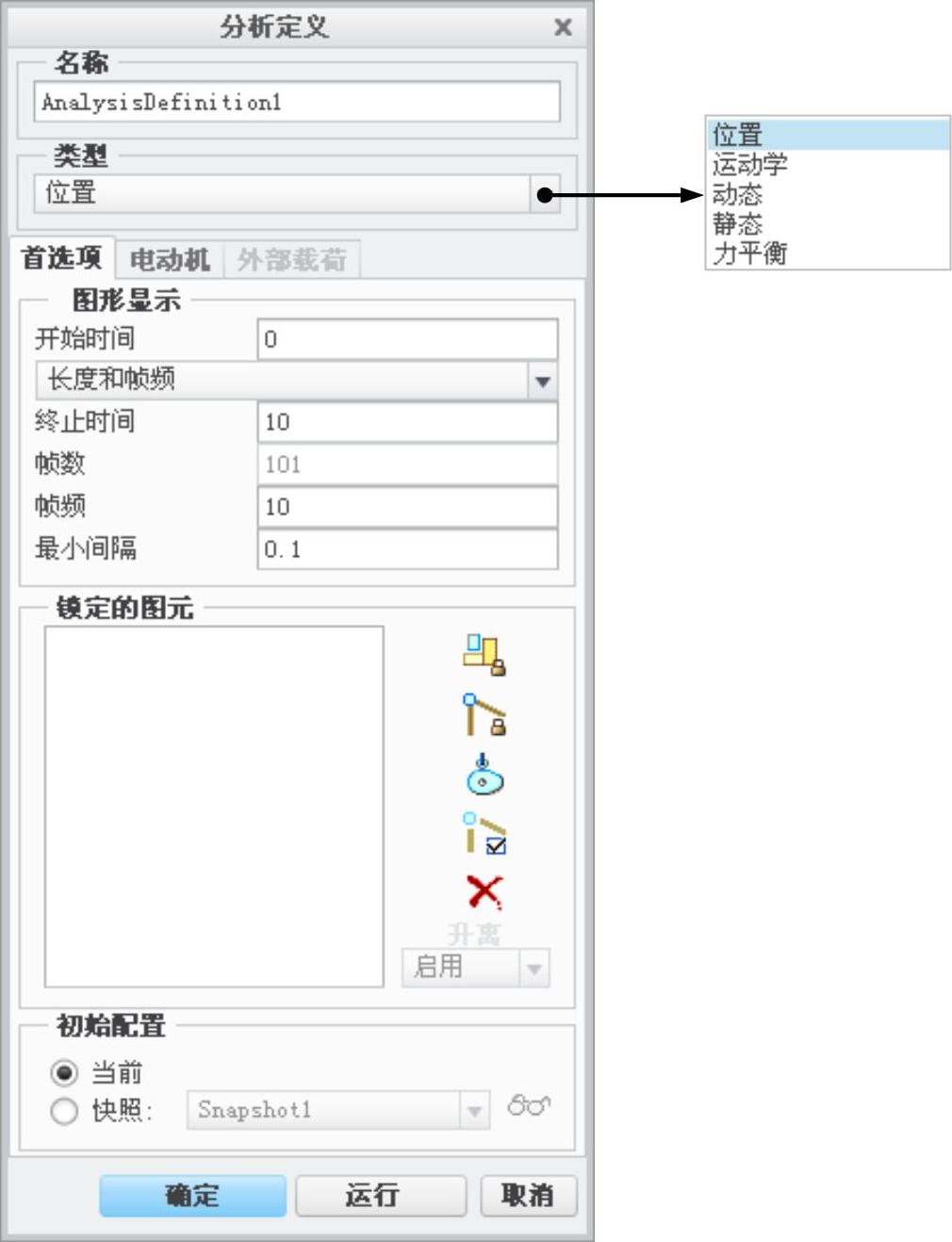
图6.1.1 “分析定义”对话框
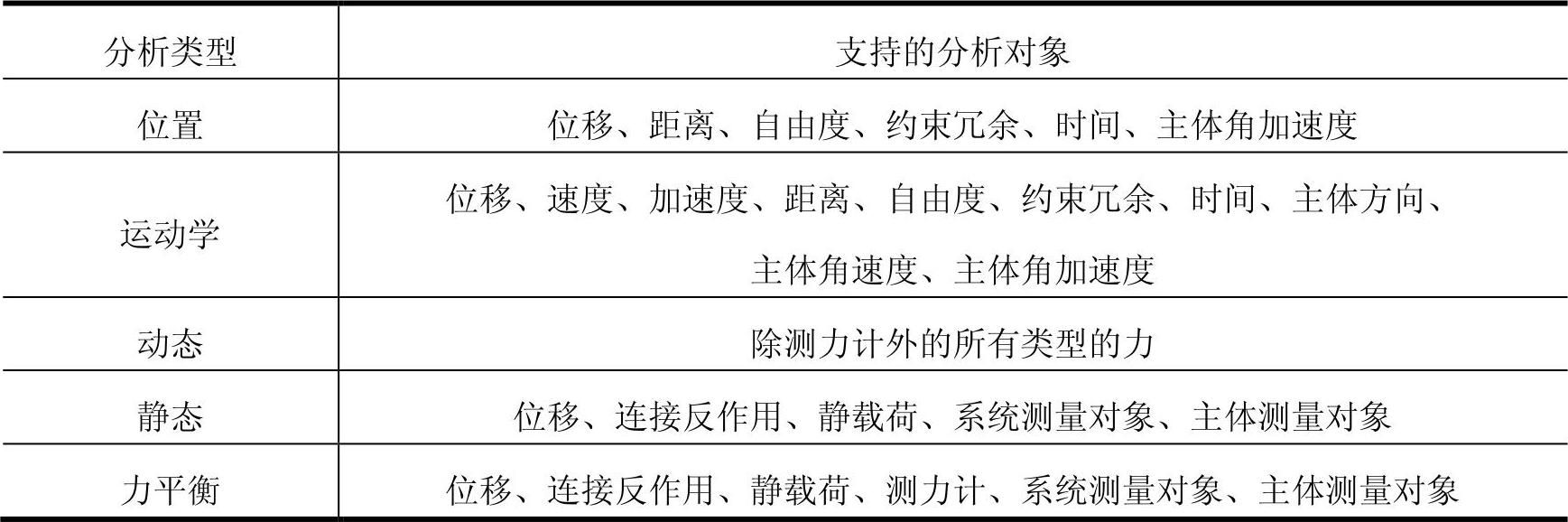
对于不同的分析类型,还需要和Creo运动仿真中的“测量”工具配合使用,才能达到具体的分析目的。表6.1.1显示了不同的分析类型支持的测量对象。在进行机构分析之前,要根据当前的测量研究对象,选取正确的分析类型,否则可能达不到分析的目的。例如要分析某元件的速度和加速度,应选择“运动学”类型,如果选择“位置”类型将无法显示分析结果。
表6.1.1 分析类型与测量对象对照表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






