对于有弹簧的机构的仿真,可以添加一个“弹簧”连接。弹簧在被拉伸或压缩时产生弹力,弹力的大小与弹簧受力时长度的变化有关。弹力大小的公式为F=K*(X-U),其中K为弹性系数,U为弹簧的初始长度,单位依据用户选择的单位制而不同。
弹簧可以定义在连接轴上,也可以定义在两点之间。定义的弹簧是一个虚拟的连接,只在机构模块中可见,在装配和建模模块中不显示。
下面举例说明定义弹簧的操作过程。在图5.5.1所示的模型中,两个柱形元件通过一个“滑块”连接进行装配,平移轴为柱体的中心轴。现较大柱体固定,并在两元件的中心轴处添加一个弹簧,当较小元件进行上下往复运动时,弹簧的长度将因受力产生变化。
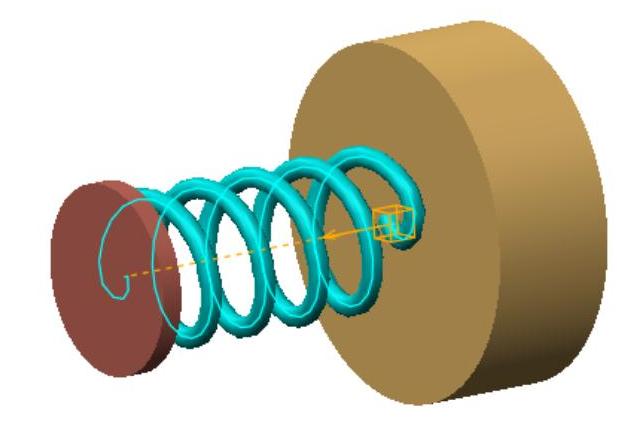
图5.5.1 机构模型
Step1.将工作目录设置至D:\creo2.16\work\ch05\ch05.05\,打开文件spring_asm.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step3.定义弹簧。
(1)选择命令。单击 区域中的“弹簧”按钮
区域中的“弹簧”按钮 ,系统弹出图5.5.2所示的“弹簧”操控板。
,系统弹出图5.5.2所示的“弹簧”操控板。

图5.5.2 “弹簧”操控板
(2)定义弹簧类型。在操控板中按下“延伸/压缩弹簧”按钮
(3)选取参考对象。在操控板中单击 按钮,按住Ctrl键,选取图5.5.3所示的两个基准点为参考对象。
按钮,按住Ctrl键,选取图5.5.3所示的两个基准点为参考对象。
(4)定义弹簧直径。在操控板中单击 按钮,选中其中的
按钮,选中其中的 复选框,输入弹簧的直径值16,单位为mm。
复选框,输入弹簧的直径值16,单位为mm。
(5)定义弹簧参数。在操控板的 文本框中输入弹簧系数30,然后单击
文本框中输入弹簧系数30,然后单击 按钮,将机构中平移轴的位置值设置为弹簧的长度(即设置U=45mm),此时弹簧显示如图5.5.4所示。
按钮,将机构中平移轴的位置值设置为弹簧的长度(即设置U=45mm),此时弹簧显示如图5.5.4所示。
(6)单击操控板中的 按钮,完成弹簧的定义。
按钮,完成弹簧的定义。
 (www.daowen.com)
(www.daowen.com)
图5.5.3 选取参考对象
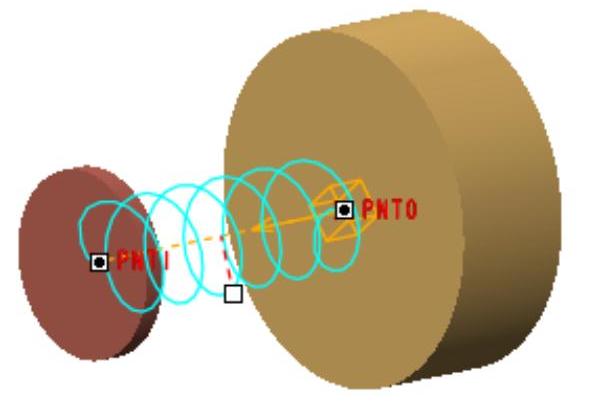
图5.5.4 定义弹簧参数
Step4.定义伺服电动机。
(1)选择命令。单击 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,系统弹出“伺服电动机定义”对话框。
,系统弹出“伺服电动机定义”对话框。
(2)选取参考对象。选取图5.5.5所示的连接为参考对象。
(3)设置轮廓参数。单击“伺服电动机定义”对话框中的 选项卡,在“定义运动轴设置”按钮
选项卡,在“定义运动轴设置”按钮 右侧的下拉列表中选择
右侧的下拉列表中选择 选项,在“模”下拉列表中选择
选项,在“模”下拉列表中选择 选项,设置A=-22.5,B=0,C=67.5,T=2。
选项,设置A=-22.5,B=0,C=67.5,T=2。
(4)单击对话框中的 按钮,完成伺服电动机的定义。。
按钮,完成伺服电动机的定义。。
Step5.定义机构分析。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
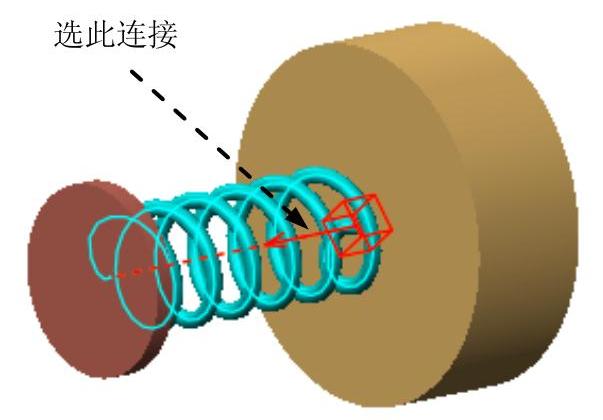
图5.5.5 选取参考对象
(2)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况,观察弹簧的长度变化。
按钮,查看机构的运行状况,观察弹簧的长度变化。
(3)完成运动分析。单击 完成运动分析。
完成运动分析。
Step6.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step7.保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







