机构的质量属性是指机构中各元件的密度、体积、质量、重心及惯性矩等参数属性。在对机构进行运行动态和和静态分析,需要为机构指定质量属性。指定质量属性能够使仿真分析更加真实,有时还关系到仿真能否顺利进行。指定质量属性可以给主体定义,也可以指定给机构中的元件,还可以指定到整个组件。下面说明定义质量属性的一般操作方法。
Step1.将工作目录设置为D:\creo2.16\work\ch05\ch05.01,打开文件linkage_mech.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step3.选择命令。单击 区域中的“质量属性”按钮
区域中的“质量属性”按钮 ,系统弹出“质量属性”对话框。
,系统弹出“质量属性”对话框。
Step4.选择参考类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
Step5.选取参考零件。选取图5.1.1所示的连杆为参考零件。
Step6.定义属性。在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 文本框中输入密度值7.8500e-09,按Enter键确认,如图5.1.2所示。
文本框中输入密度值7.8500e-09,按Enter键确认,如图5.1.2所示。
Step7.单击 按钮,完成质量属性的指定。
按钮,完成质量属性的指定。
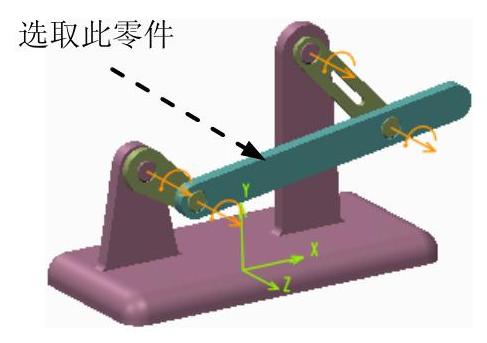
图5.1.1 选取参考零件
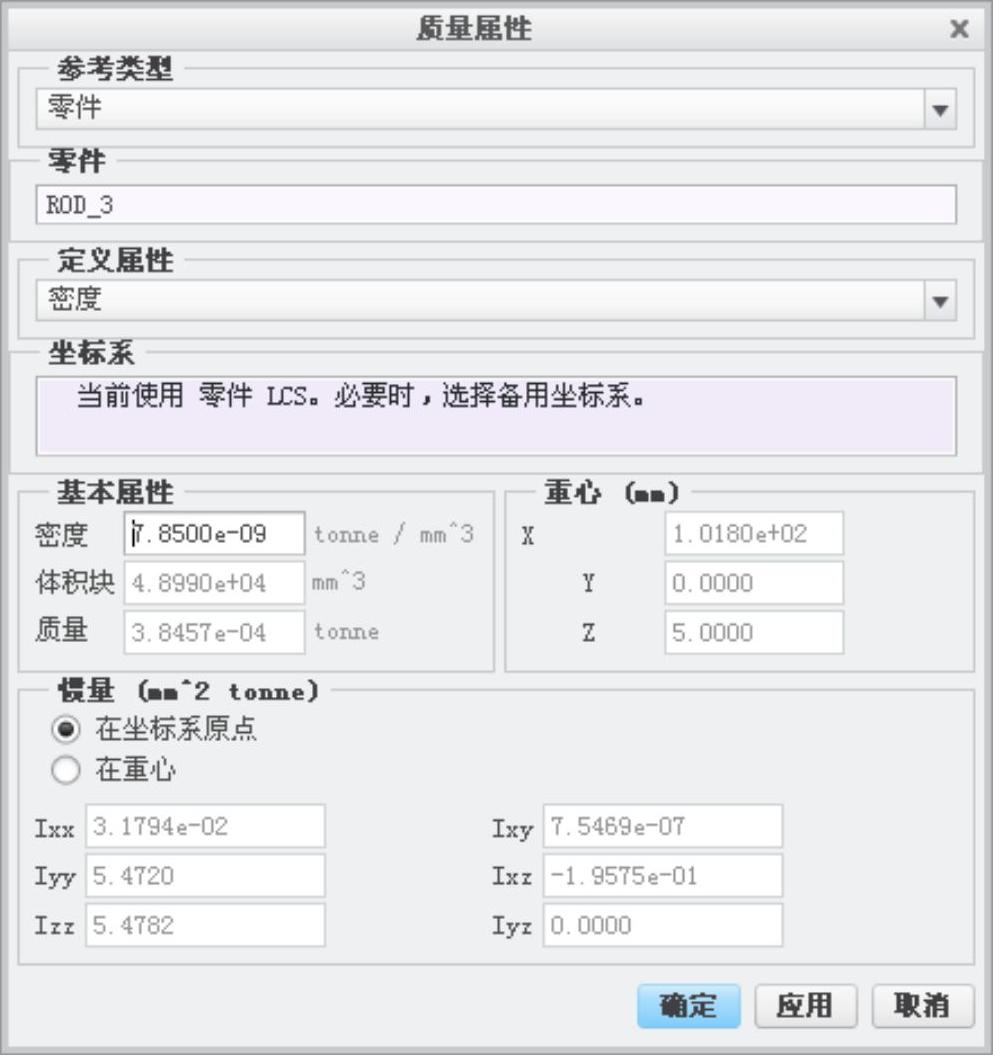
图5.1.2 “质量属性”对话框
图5.1.2所示的“质量属性”对话框中各选项说明如下。
● 区域:选择指定质量属性的参考类型。
区域:选择指定质量属性的参考类型。
☑ 选项:选择一个或多个零件指定质量属性。(www.daowen.com)
选项:选择一个或多个零件指定质量属性。(www.daowen.com)
☑ 选项:指定整个装配或子装配的质量属性,选择该选项后,可以指定整个装配的密度,如图5.1.3所示。
选项:指定整个装配或子装配的质量属性,选择该选项后,可以指定整个装配的密度,如图5.1.3所示。
☑ 选项:选择一个主体查看质量属性,但不能修改质量属性。
选项:选择一个主体查看质量属性,但不能修改质量属性。

图5.1.3 “装配”参考类型
● 区域:选择参考坐标系,以计算惯量参数。
区域:选择参考坐标系,以计算惯量参数。
● 区域:选择指定质量属性的定义类型。
区域:选择指定质量属性的定义类型。
☑ 选项:选择一个零件查看质量属性,但不能修改质量属性。
选项:选择一个零件查看质量属性,但不能修改质量属性。
☑ 选项:选择此选项,可以指定零件的密度。
选项:选择此选项,可以指定零件的密度。
☑ 选项:选择此选项,可以指定零件的质量。
选项:选择此选项,可以指定零件的质量。
● 区域:定义基本质量属性,但不能修改指定对象的体积。
区域:定义基本质量属性,但不能修改指定对象的体积。
● 区域:显示或指定重心位置,可以假设机构的全部质量都集中在重心之上。
区域:显示或指定重心位置,可以假设机构的全部质量都集中在重心之上。
● 区域:显示或指定惯量。
区域:显示或指定惯量。
☑ :显示相对于当前参考坐标系的惯量。
:显示相对于当前参考坐标系的惯量。
☑ :显示相对于机构主惯性轴的惯量。
:显示相对于机构主惯性轴的惯量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






