范例概述:
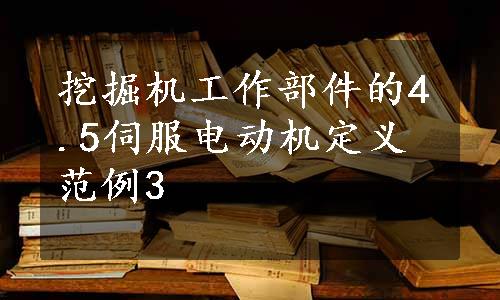
本范例将介绍在图4.5.1所示的挖掘机工作部件中添加伺服电动机的操作过程。在该机构中需要添加4组伺服电动机,分别驱动回转台、动臂液压缸、斗杆液压缸和铲斗液压缸的运动,4组伺服电动机均采用“运动轴”的定义方法,并使用表格来实现工作部件的联动。
图4.5.1 挖掘机工作部件
Step1.将工作目录设置至D:\creo2.16\work\ch04\ch04.05,打开文件0-backhoe.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
设定挖掘机工作部件单个工作周期如下:
●初始状态。
☑回转台的回转角度初始值为0。
☑设置动臂液压缸的连接位置初始值为380。
☑设置斗杆液压缸的连接位置初始值为500。
☑设置铲斗液压缸的连接位置初始值为800。
●工作状态1(时间范围0~4s,设定各部件同时运动)。
☑回转台固定不动。
☑动臂液压缸的连接位置值由380变化至675,使动臂上扬。
☑斗杆液压缸的连接位置值由500变化至50,使斗杆上扬。
☑铲斗液压缸的连接位置值由800变化至240,使铲斗竖直。
●工作状态2(时间范围4~6s)。
☑回转台固定不动。
☑动臂液压缸的连接位置值由675变化至375,使动臂落下。
☑斗杆液压缸的连接位置值由50变化至900,使斗杆下压。
☑铲斗固定不动。
●工作状态3(时间范围6~8s)。
☑回转台固定不动。
☑动臂固定不动。
☑斗杆固定不动。
☑铲斗液压缸的连接位置值由240变化至640,使铲斗水平。
●工作状态4(时间范围8~10s)。
☑回转台固定不动。
☑动臂液压缸的连接位置值由375变化至675,动臂回升。
☑斗杆固定不动。
☑铲斗固定不动。
●工作状态5(时间范围10~13s)。
☑回转台连接位置值(角度值)由0变化至150,回转台旋转150°。
☑动臂固定不动。
☑斗杆固定不动。
☑铲斗固定不动。
●工作状态6(时间范围13~15s)。
☑回转台固定不动。
☑动臂固定不动。
☑斗杆液压缸的连接位置值由900变化至500,使斗杆上扬。
☑铲斗液压缸的连接位置值由640变化至240,使铲斗竖直。
●工作状态7(时间范围15~17s)。
☑回转台连接位置值(角度值)由150变化至0,回转台旋转150°。
☑动臂固定不动。
☑斗杆固定不动。
☑铲斗固定不动。
●一个工作周期结束。
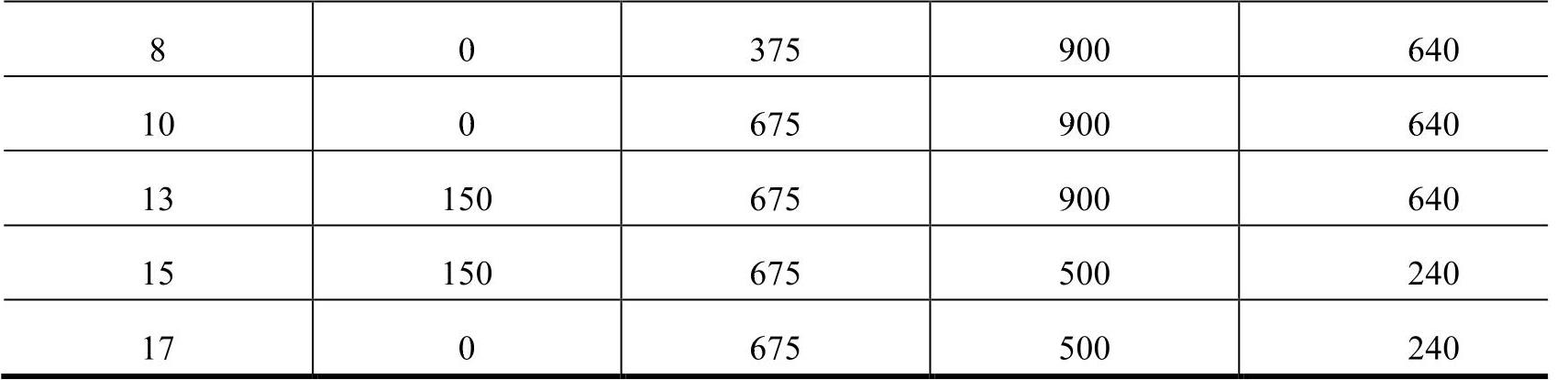
各工作状态的时间、驱动连接的位置变化见表4.5.1。
表4.5.1 驱动连接位置变化表
 (www.daowen.com)
(www.daowen.com)
Step3.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生模型。
,再生模型。
Step4.定义伺服电动机1(回转台驱动)。
(1)选择命令。单击 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,系统弹出“伺服电动机定义”对话框。
,系统弹出“伺服电动机定义”对话框。
(2)选取参考对象。选取图4.5.2所示的连接为参考对象。
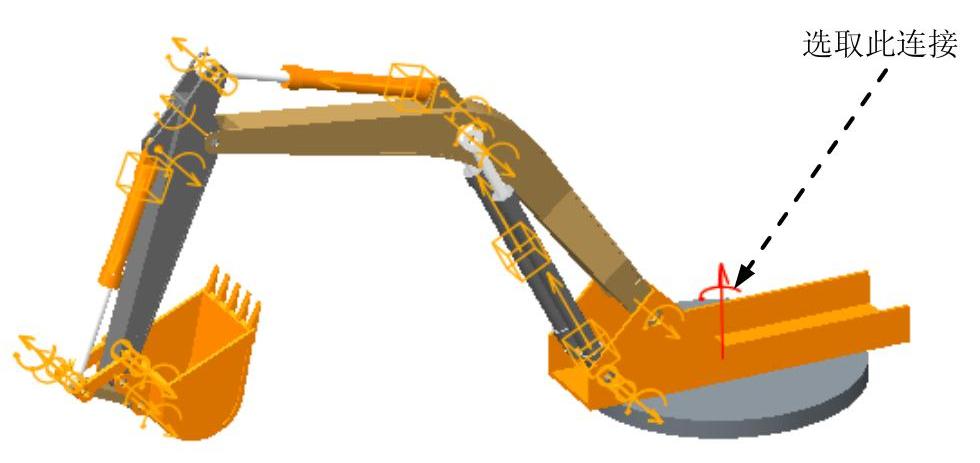
图4.5.2 选取参考对象
(3)设置轮廓参数。定义伺服电动机类型。在“伺服电动机定义”对话框的 选项卡中选择
选项卡中选择 类型为
类型为 ,在
,在 下拉列表中选择
下拉列表中选择 选项。
选项。
(4)选择拟合类型。在 区域中选中
区域中选中 单选项。
单选项。
(5)输入表数据。
① 定义第1行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值0,在
文本框中输入值0,在 文本框中输入值0。
文本框中输入值0。
② 定义第2行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值4,在
文本框中输入值4,在 文本框中输入值0。
文本框中输入值0。
③ 定义第3行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值6,在
文本框中输入值6,在 文本框中输入值0。
文本框中输入值0。
④ 定义其他数据。参照表4.5.1中回转台的位置数据,定义其他行的数据,如图4.5.3所示。
(6)选中 选项右下方的位置复选框,然后单击图形按钮
选项右下方的位置复选框,然后单击图形按钮 ,系统弹出图4.5.4所示的“图形工具”对话框,该对话框中同时显示伺服电动机的位置函数图形。
,系统弹出图4.5.4所示的“图形工具”对话框,该对话框中同时显示伺服电动机的位置函数图形。
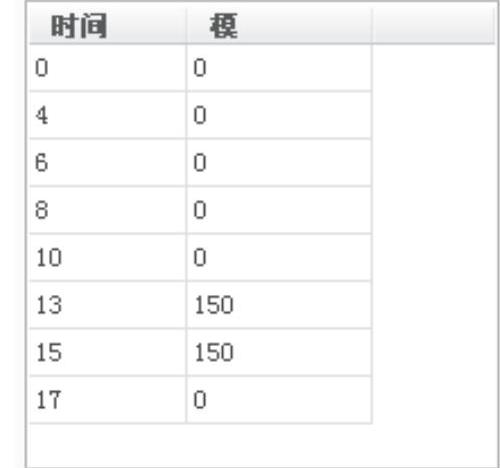
图4.5.3 设置“表”参数
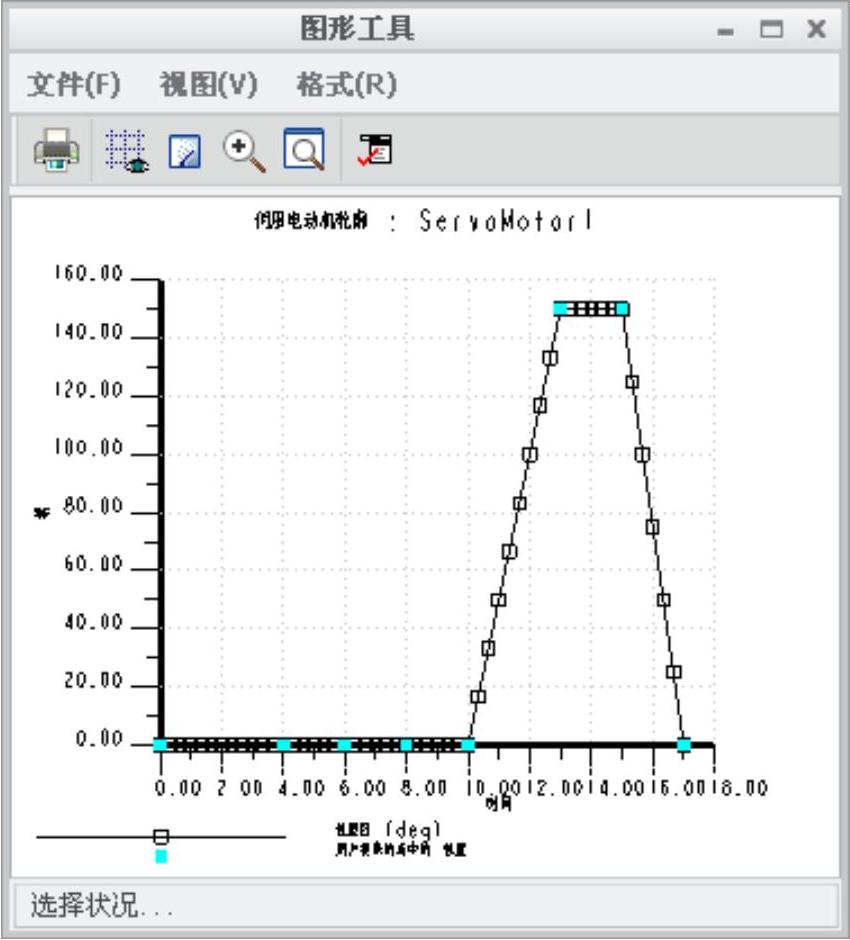
图4.5.4 “图形工具”对话框
(7)单击对话框中的 按钮,完成伺服电动机的定义。
按钮,完成伺服电动机的定义。
(8)关闭“图形工具”对话框。
Step5.定义伺服电动机2(动臂液压驱动)。单击 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,选取图4.5.5所示的连接为参考对象;在“伺服电动机定义”对话框的
,选取图4.5.5所示的连接为参考对象;在“伺服电动机定义”对话框的 选项卡中选择
选项卡中选择 类型为
类型为 ,在
,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 区域中选中
区域中选中 单选项;单击“向表中添加行”按钮
单选项;单击“向表中添加行”按钮 ,参照表4.5.1中的位置数据,定义
,参照表4.5.1中的位置数据,定义 数据和
数据和 数据,如图4.5.6所示;该伺服电动机的位置函数图形如图4.5.7所示。
数据,如图4.5.6所示;该伺服电动机的位置函数图形如图4.5.7所示。
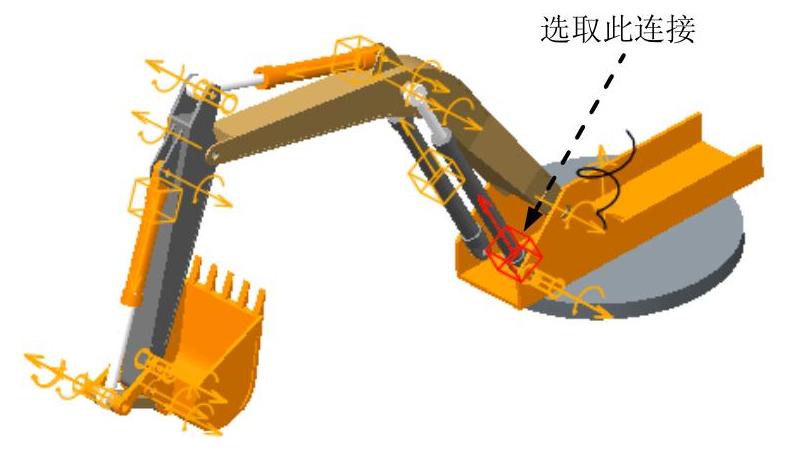
图4.5.5 选取参考对象
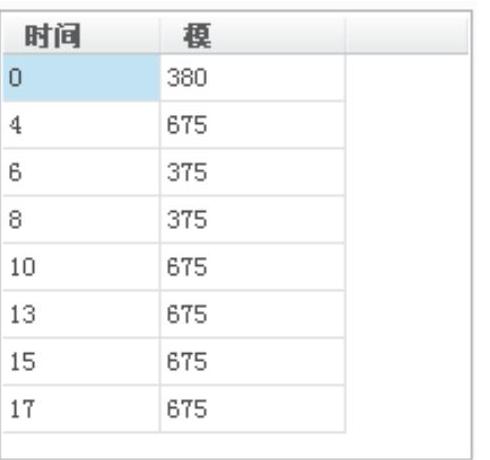
图4.5.6 设置“表”参数
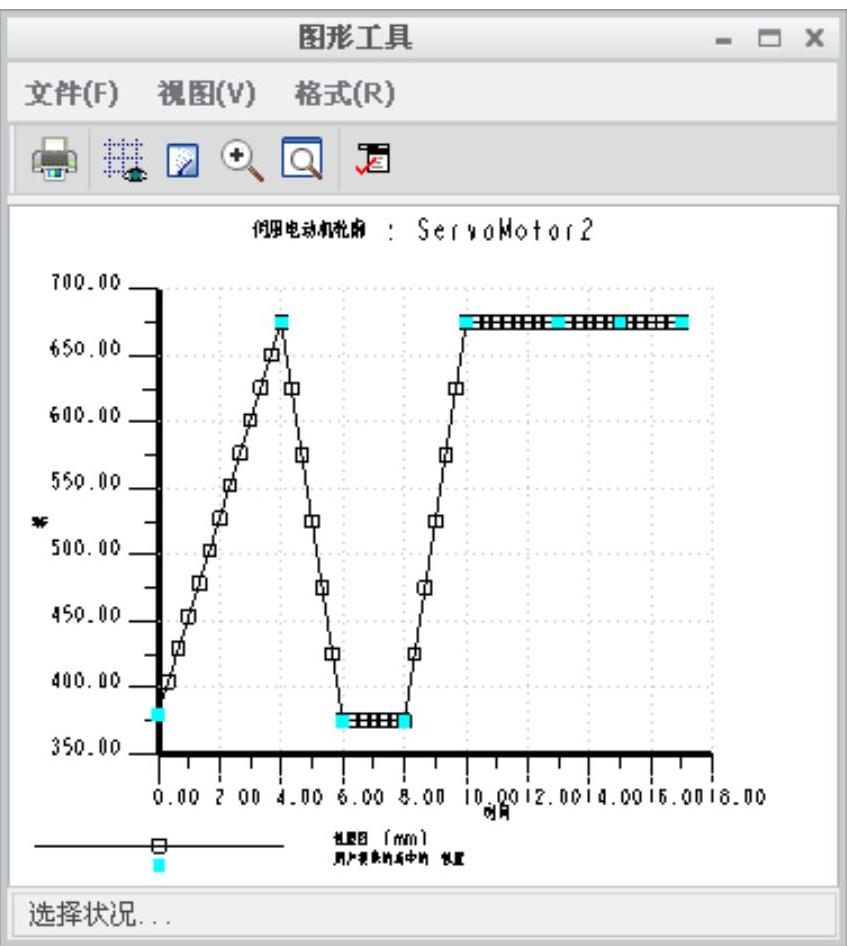
图4.5.7 “图形工具”对话框
Step6.定义伺服电动机3(斗杆液压驱动)。选取图4.5.8所示的连接为参考对象,参照Step5中的操作和表4.5.1中的位置数据,定义 数据和
数据和 数据如图4.5.9所示;该伺服电动机的位置函数图形如图4.5.10所示。
数据如图4.5.9所示;该伺服电动机的位置函数图形如图4.5.10所示。
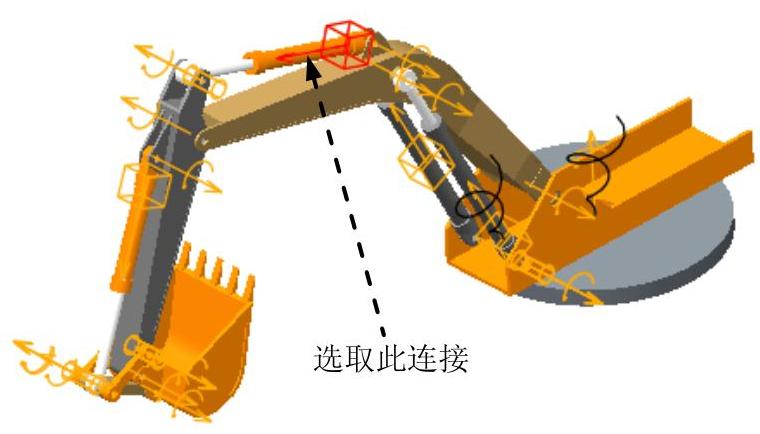
图4.5.8 选取参考对象
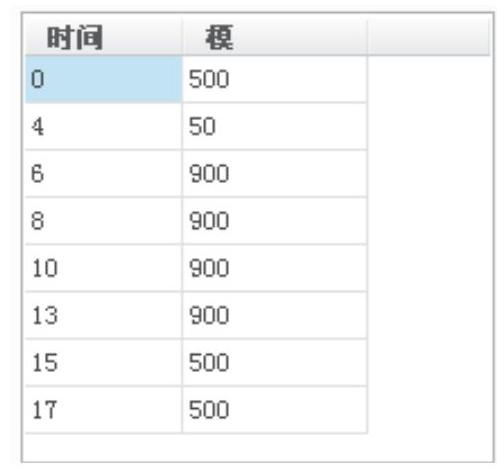
图4.5.9 设置“表”参数
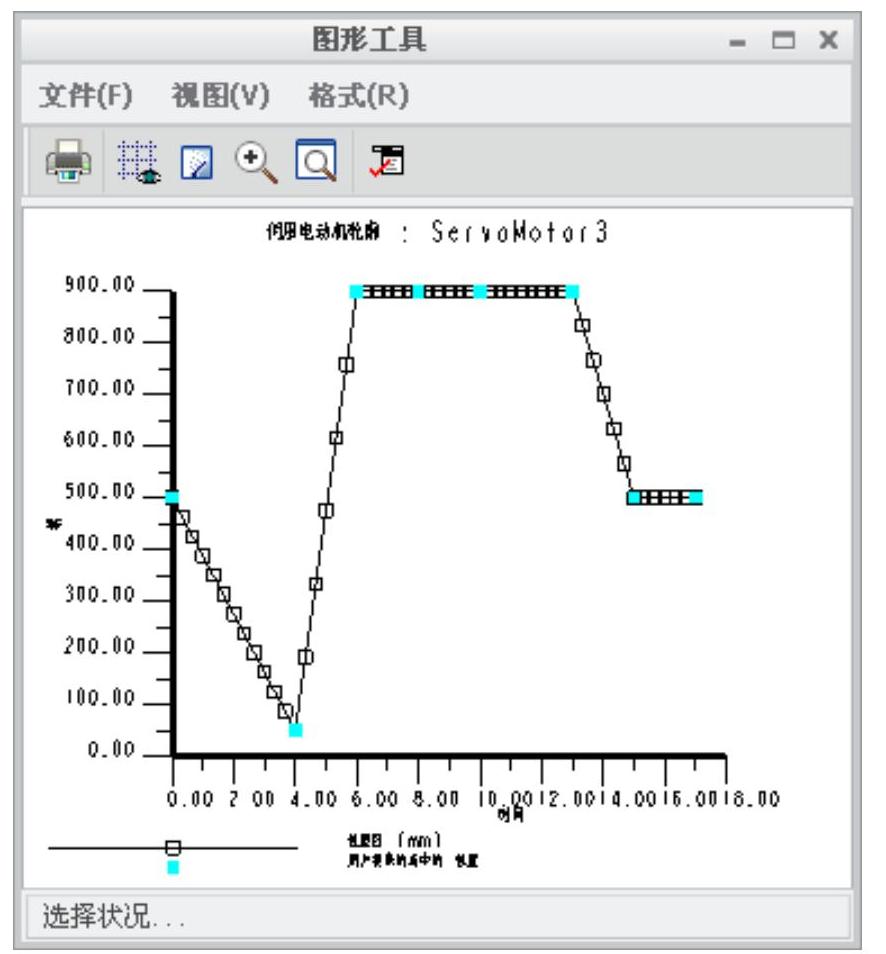
图4.5.10 “图形工具”对话框
Step7.定义伺服电动机4(铲斗液压驱动)。选取图4.5.11所示的连接为参考对象,参照Step5中的操作和表4.5.1中的位置数据,定义 数据和
数据和 数据如图4.5.12所示;该伺服电动机的位置函数图形如图4.5.13所示。
数据如图4.5.12所示;该伺服电动机的位置函数图形如图4.5.13所示。
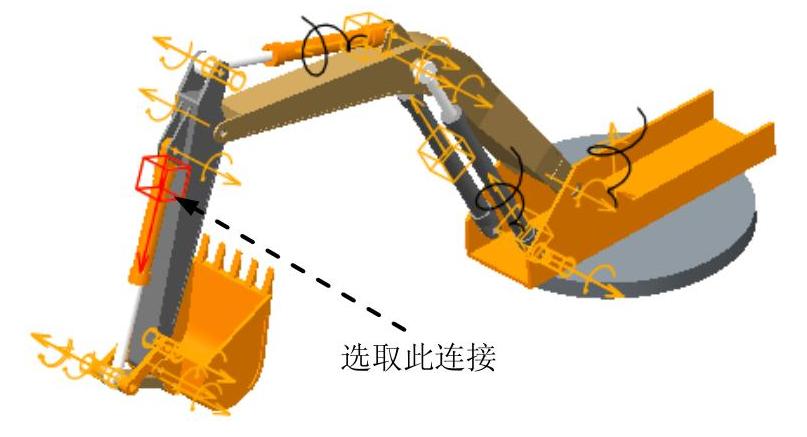
图4.5.11 选取参考对象
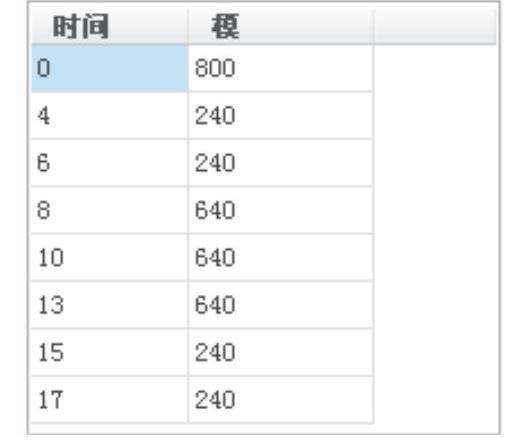
图4.5.12 设置“表”参数
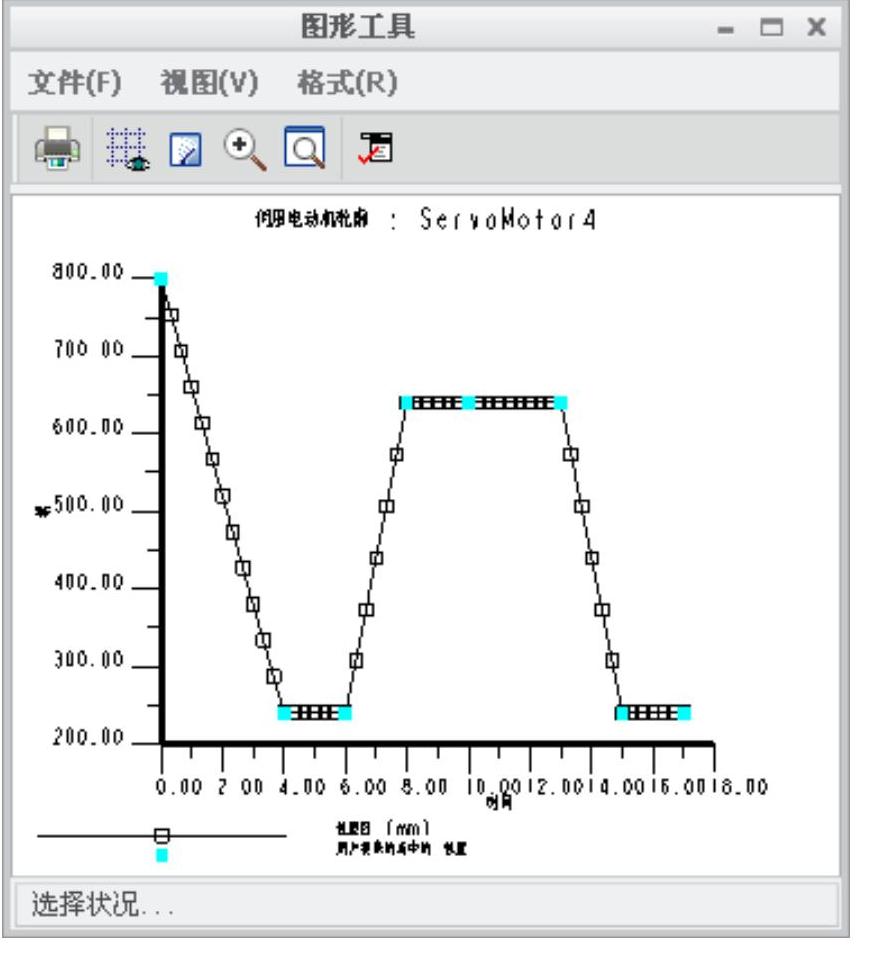
图4.5.13 “图形工具”对话框
Step8.定义机构分析。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
(2)在 文本框中输入值17。
文本框中输入值17。
(3)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况。
按钮,查看机构的运行状况。
(4)完成运动分析。单击 完成运动分析。
完成运动分析。
Step9.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step10.保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



