【摘要】:该伺服电动机采用“运动轴”的定义方法,并选用斜坡函数定义输入轴的转速。Step2.进入机构模块。Step3.定义伺服电动机选择命令。单击区域中的“伺服电动机”按钮,系统弹出“伺服电动机定义”对话框。选中选项右下方的速度复选框,然后单击图形按钮,系统弹出图4.3.3所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度函数图形。Step4定义机构分析。Step6.保存机构模型。
范例概述:
本范例将介绍在万向节机构中添加伺服电动机的操作过程。该伺服电动机采用“运动轴”的定义方法,并选用斜坡函数定义输入轴的转速。
Step1.将工作目录设置至D:\creo2.16\work\ch04\ch04.03,打开文件gimba_asm.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step3.定义伺服电动机
(1)选择命令。单击 区域中的“伺服电动机”按钮
区域中的“伺服电动机”按钮 ,系统弹出“伺服电动机定义”对话框。
,系统弹出“伺服电动机定义”对话框。
(2)选取参考对象。选取图4.3.1所示的连接为参考对象。
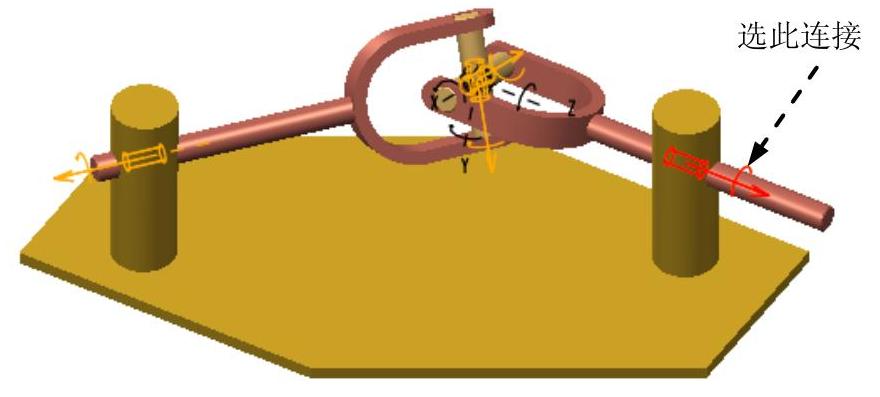
图4.3.1 选取参考对象
(3)设置轮廓参数。单击“伺服电动机定义”对话框中 选项卡,在“定义运动轴设置”按钮
选项卡,在“定义运动轴设置”按钮 右侧的下拉列表中选择
右侧的下拉列表中选择 选项,在“模”下拉列表中选择
选项,在“模”下拉列表中选择 选项,设置A=72,B=20,如图4.3.2所示。
选项,设置A=72,B=20,如图4.3.2所示。
(4)选中 选项右下方的速度复选框,然后单击图形按钮
选项右下方的速度复选框,然后单击图形按钮 ,系统弹出图4.3.3所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度函数图形。
,系统弹出图4.3.3所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度函数图形。
(5)单击对话框中的 按钮,完成伺服电动机的定义。(www.daowen.com)
按钮,完成伺服电动机的定义。(www.daowen.com)
(6)关闭“图形工具”对话框。
Step4定义机构分析。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
(2)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况,可以发现输入轴的转速在逐渐增加。
按钮,查看机构的运行状况,可以发现输入轴的转速在逐渐增加。
(3)完成运动分析。单击 完成运动分析。
完成运动分析。

图4.3.2 设置“斜坡”参数
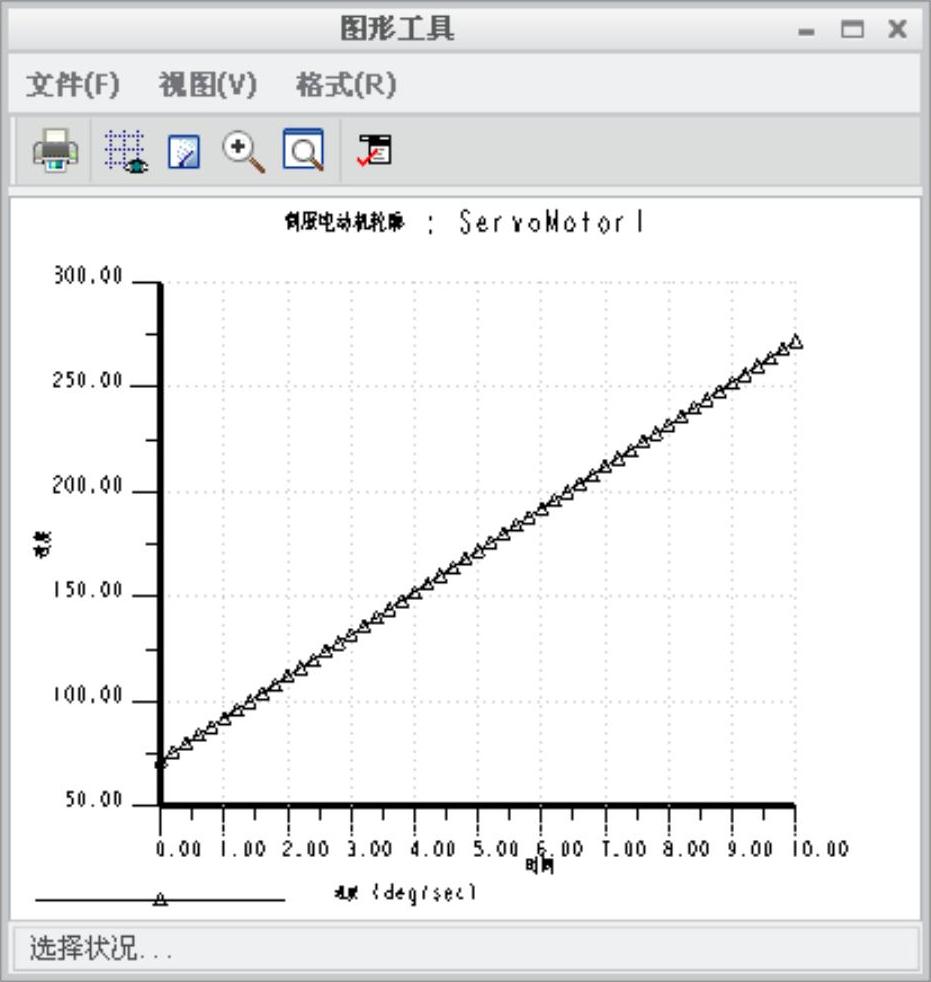
图4.3.3 “图形工具”对话框
Step5.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step6.保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





