单击“伺服电动机定义”对话框中的 选项卡,在该选项卡界面中可以定义伺服电动机的运动轮廓曲线,如图4.2.2所示。
选项卡,在该选项卡界面中可以定义伺服电动机的运动轮廓曲线,如图4.2.2所示。
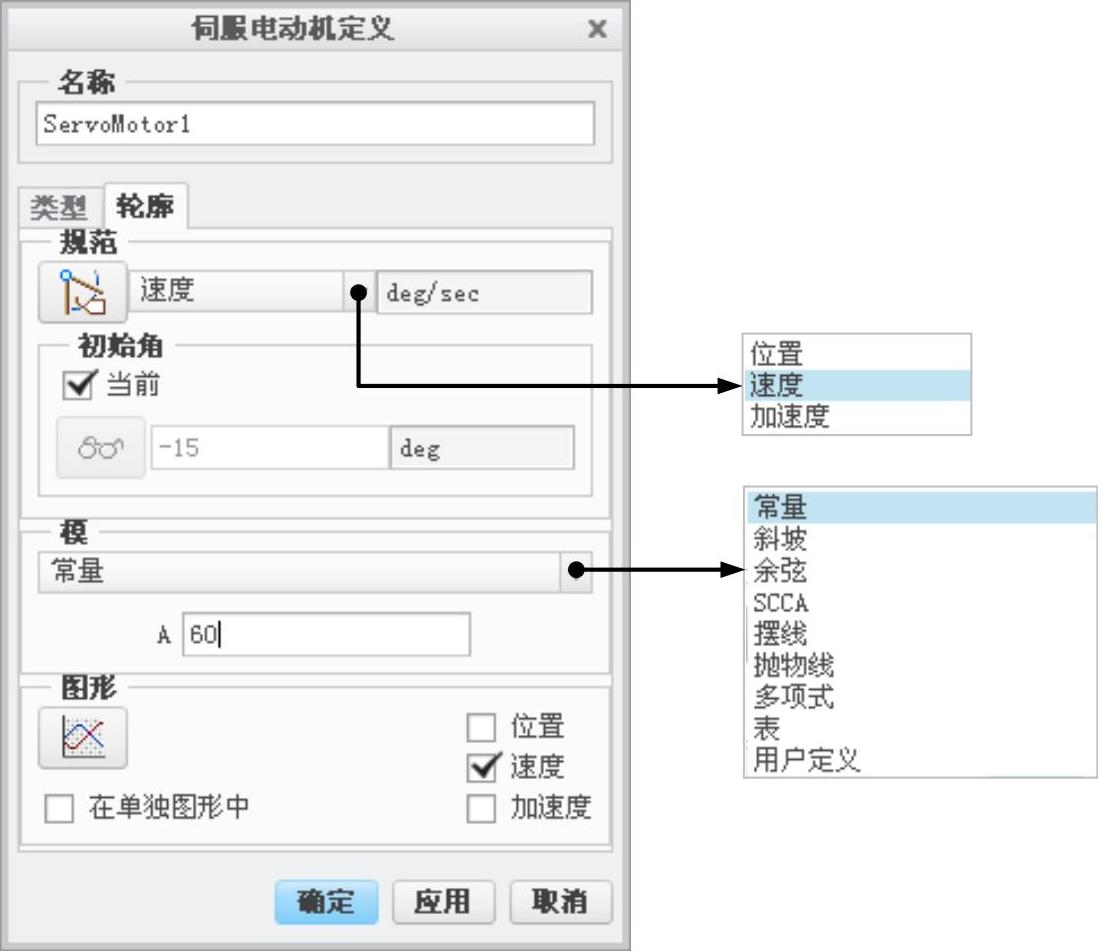
图4.2.2 “轮廓”选项卡
图4.2.2所示的 选项卡
选项卡 下拉列表中的各项说明如下:
下拉列表中的各项说明如下:
● :定义从动图元的位置函数。
:定义从动图元的位置函数。
● :定义从动图元的速度函数。选择此选选项后,需指定运行的初始位置,默认的初始位置为“当前”。
:定义从动图元的速度函数。选择此选选项后,需指定运行的初始位置,默认的初始位置为“当前”。
● :定义从动图元的加速度函数。选择此选项后,可以指定运行的初始位置和初始速度,其默认设置分别为“当前”和0.0。
:定义从动图元的加速度函数。选择此选项后,可以指定运行的初始位置和初始速度,其默认设置分别为“当前”和0.0。
根据机构需要施加的运动类型,可以利用 选项卡
选项卡 下拉列表中系统提供的多种方式定义伺服电动机的轮廓曲线,如函数、多项式、表格和用户自定义等,下面将分别进行介绍。
下拉列表中系统提供的多种方式定义伺服电动机的轮廓曲线,如函数、多项式、表格和用户自定义等,下面将分别进行介绍。
1.常量
该选项可以设置机构的位置、速度和加速度为恒定值,函数表达式为y=A,其中A=常量。当定义其中的某个参数后,其他参数的轮廓函数将自行出现,并能以图表的形式进行显示。
下面说明函数的设置和图表显示的一般操作方法。
Step1.在“伺服电动机定义”对话框的 选项卡中选择
选项卡中选择 类型为
类型为 ,在
,在 下拉列表中选择
下拉列表中选择 选项,并将初始速度设置为0,A的值设置为10,如图4.2.3所示。
选项,并将初始速度设置为0,A的值设置为10,如图4.2.3所示。
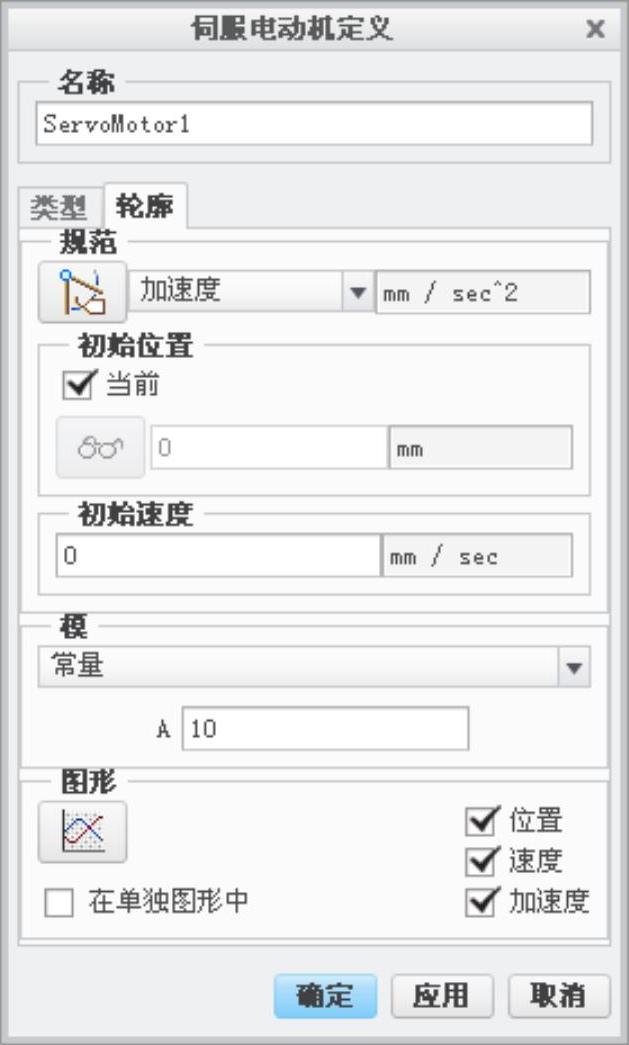
图4.2.3 设置“常量”参数
Step2.选中 选项右下方的位置、速度和加速度复选框,然后单击图形按钮
选项右下方的位置、速度和加速度复选框,然后单击图形按钮 ,系统弹出图4.2.4所示的“图形工具”对话框,该对话框中同时显示伺服电动机的位置、速度和加速度函数图形。
,系统弹出图4.2.4所示的“图形工具”对话框,该对话框中同时显示伺服电动机的位置、速度和加速度函数图形。
说明:在该窗口中单击 按钮可打印函数图形;选择“文件”下拉菜单可按“文本”或EXCEL格式输出图形。
按钮可打印函数图形;选择“文件”下拉菜单可按“文本”或EXCEL格式输出图形。
Step3.单击“图形工具”对话框中的“格式化图形对话框”按钮 ,系统弹出图4.2.5所示的“图形窗口选项”对话框,该对话框主要用于设置函数图形的显示范围,显示时间以及图形样式和字体等参数。
,系统弹出图4.2.5所示的“图形窗口选项”对话框,该对话框主要用于设置函数图形的显示范围,显示时间以及图形样式和字体等参数。
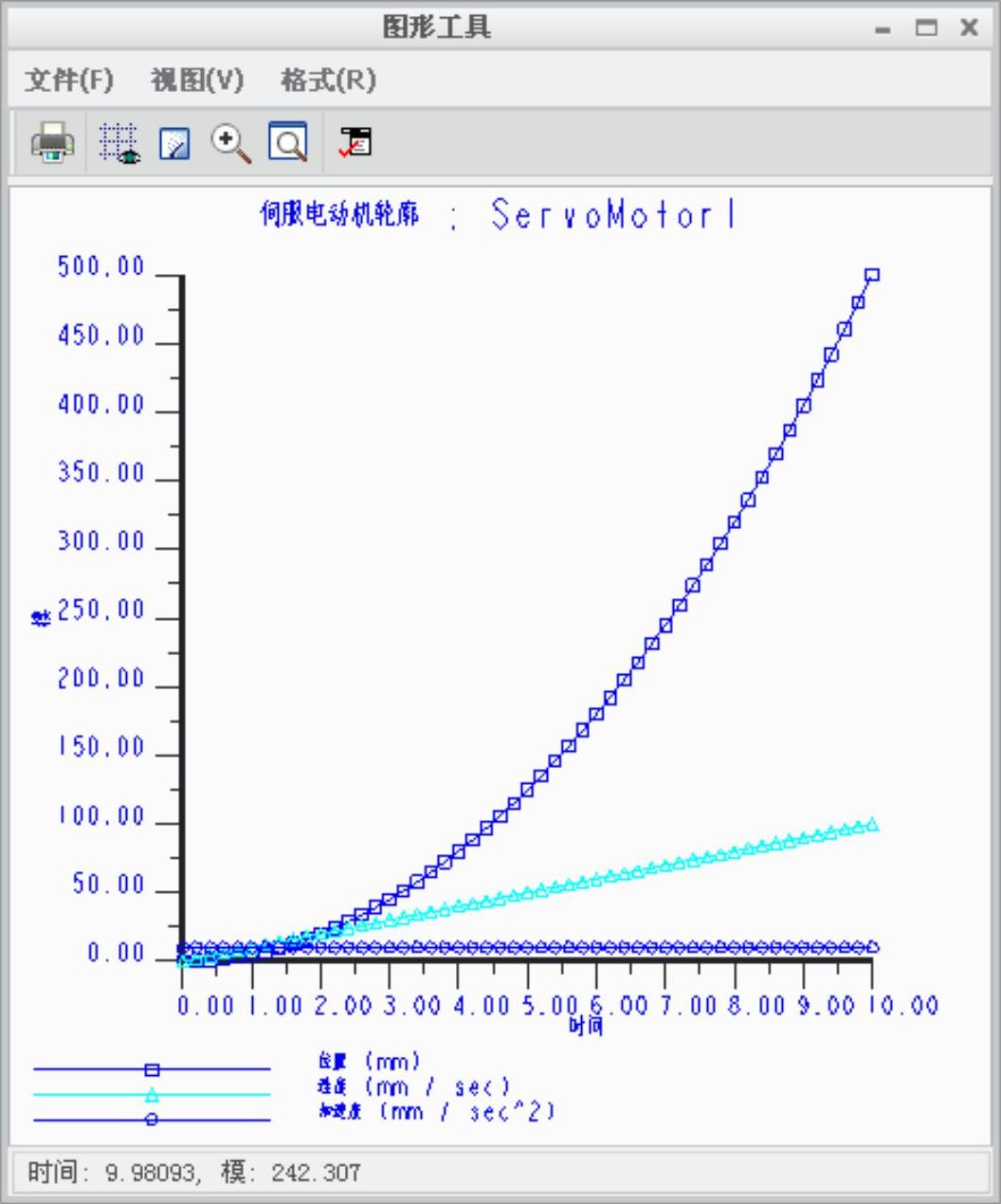
图4.2.4 “图形工具”对话框
图4.2.5所示的“图形窗口选项”对话框中的各选项卡功能简介如下:
●Y轴选项卡:如图4.2.5所示,该选项卡主要用于设置函数图形的Y轴显示范围(位移、速度和加速度的显示),刻度线的数量,文本标签的样式,栅格线的控制,图形线的粗细等参数。
●X轴选项卡:如图4.2.6所示,该选项卡主要用于设置函数图形的X轴显示范围(时间范围)以及其他参数。X轴和Y轴选项卡中各选项的说明如下:

图4.2.5 “Y轴”选项卡
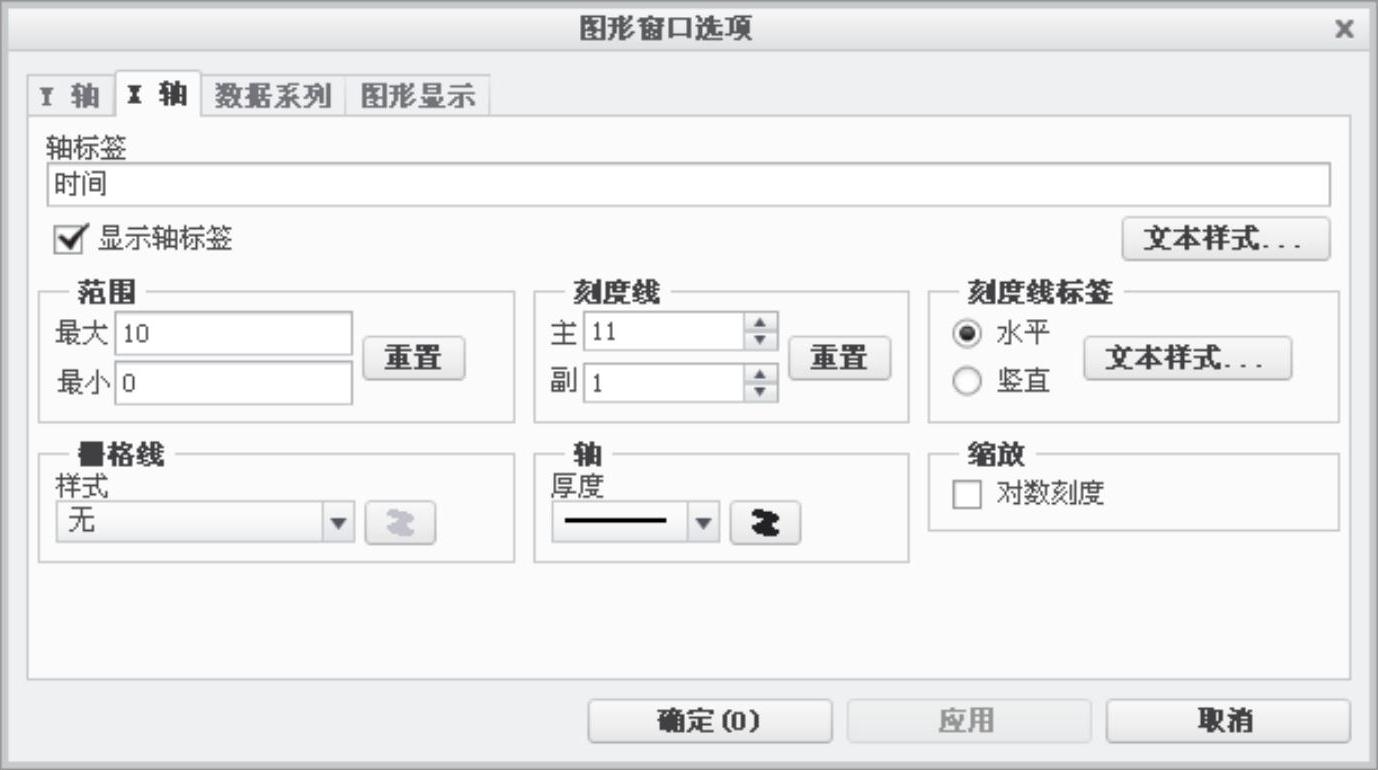
图4.2.6 “X轴”选项卡
☑ :此区域仅显示在
:此区域仅显示在 选项卡中,如有子图形还可显示子图形的一个列表。可以使拥有公共X轴、但Y轴不同的多组数据出图。从列表中选取要定制其Y轴的子图形。
选项卡中,如有子图形还可显示子图形的一个列表。可以使拥有公共X轴、但Y轴不同的多组数据出图。从列表中选取要定制其Y轴的子图形。
☑ :此区域可编辑Y轴标签。标签为文本行,显示在每个轴旁。单击
:此区域可编辑Y轴标签。标签为文本行,显示在每个轴旁。单击 按钮,可更改标签字体的样式、颜色和大小。使用
按钮,可更改标签字体的样式、颜色和大小。使用 复选框可打开或关闭轴标签的显示。
复选框可打开或关闭轴标签的显示。
☑ :更改轴的刻度范围。可修改最小值和最大值,以使窗口能够显示指定的图形范围。
:更改轴的刻度范围。可修改最小值和最大值,以使窗口能够显示指定的图形范围。
☑ :设置轴上长刻度线(主)和短刻度线(副)的数量。
:设置轴上长刻度线(主)和短刻度线(副)的数量。
☑ :设置长刻度线值的放置方式。还可单击
:设置长刻度线值的放置方式。还可单击 按钮,更改字体的样式、颜色和大小。
按钮,更改字体的样式、颜色和大小。
☑ :选取栅格线的样式。如果要更改栅格线的颜色,可单击颜色选取按钮。
:选取栅格线的样式。如果要更改栅格线的颜色,可单击颜色选取按钮。
☑ :设置Y轴的线宽及颜色。
:设置Y轴的线宽及颜色。
☑ :使用此区域可调整图形的比例。
:使用此区域可调整图形的比例。
☑ :将轴上的值更改为对数比例。使用对数比例能提供在正常比例下可能无法看到的其他信息。
:将轴上的值更改为对数比例。使用对数比例能提供在正常比例下可能无法看到的其他信息。
☑ :此区域仅出现在
:此区域仅出现在 选项卡中。可使用此区域来更改Y轴比例。
选项卡中。可使用此区域来更改Y轴比例。
●数据系列选项卡:如图4.2.7所示,该选项卡主要用于设置函数图形的数据系列和显示样式。

图4.2.7 “数据系列”选项卡
☑ :选取要定制其数据系列的图形或子图形。
:选取要定制其数据系列的图形或子图形。
☑ :此区域可编辑所选数据系列的标签。还可更改图形中点和线的颜色以及点的样式、插值。
:此区域可编辑所选数据系列的标签。还可更改图形中点和线的颜色以及点的样式、插值。
☑ :此区域可切换图例的显示及更改其字体的样式、颜色和大小。
:此区域可切换图例的显示及更改其字体的样式、颜色和大小。
●图形显示选项卡:如图4.2.8所示,该选项卡主要用于设置图形显示标签的参数。
☑ :编辑图形的标题。如果要更改标题字体的样式、颜色和大小,可单击
:编辑图形的标题。如果要更改标题字体的样式、颜色和大小,可单击 按钮;可使用
按钮;可使用 复选框来显示或关闭标题。
复选框来显示或关闭标题。
☑ :修改背景颜色。如选中
:修改背景颜色。如选中 ,单击
,单击 按钮可定制混合的背景颜色。
按钮可定制混合的背景颜色。
☑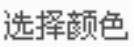 :更改用来加亮图形中的点的颜色。
:更改用来加亮图形中的点的颜色。
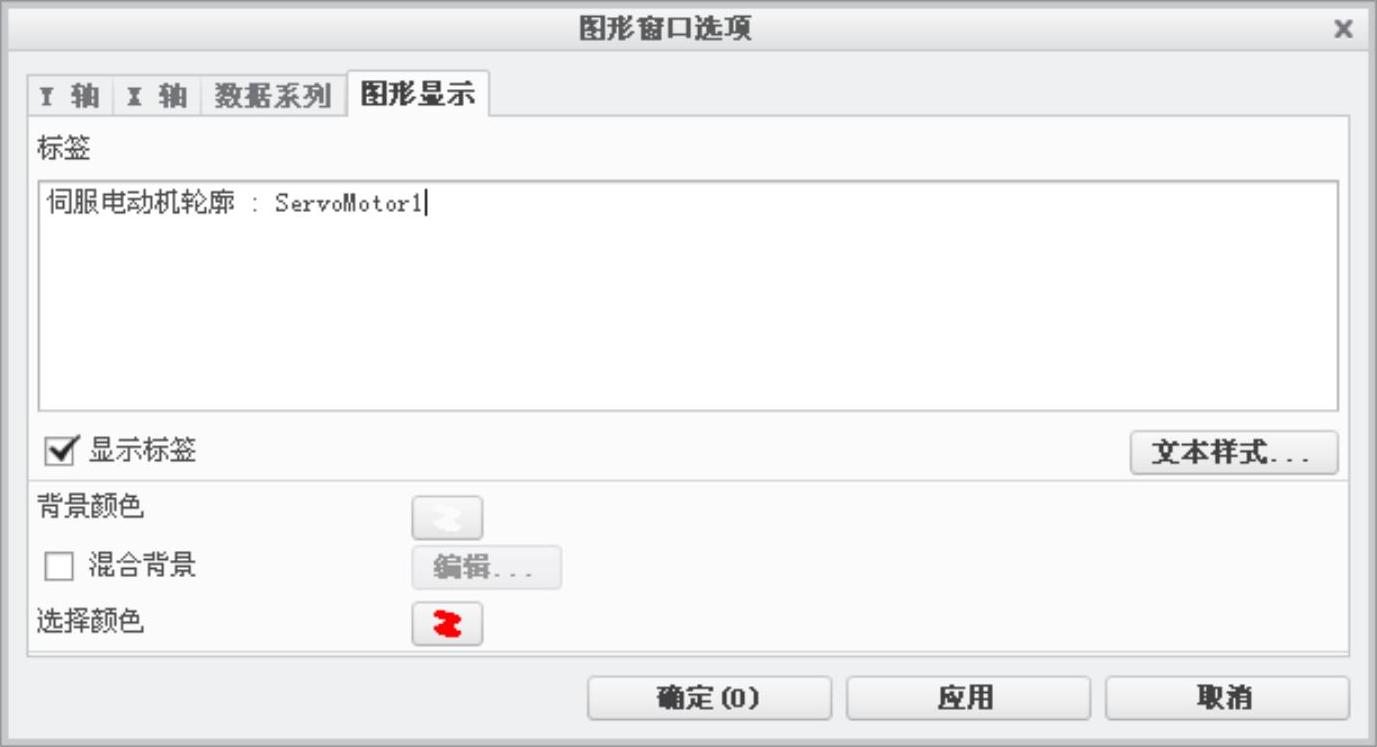
图4.2.8 “图形显示”选项卡
2.斜坡
该选项可以设置机构的位置、速度和加速度为恒定值或随时间成线性变化的运动,函数表达式为y=A+B*t,其中A=常量,B=斜率。
当设置 类型为
类型为 ,且A=1,B=5时(图4.2.9),函数图形如图4.2.10所示。
,且A=1,B=5时(图4.2.9),函数图形如图4.2.10所示。

图4.2.9 设置“斜坡”参数
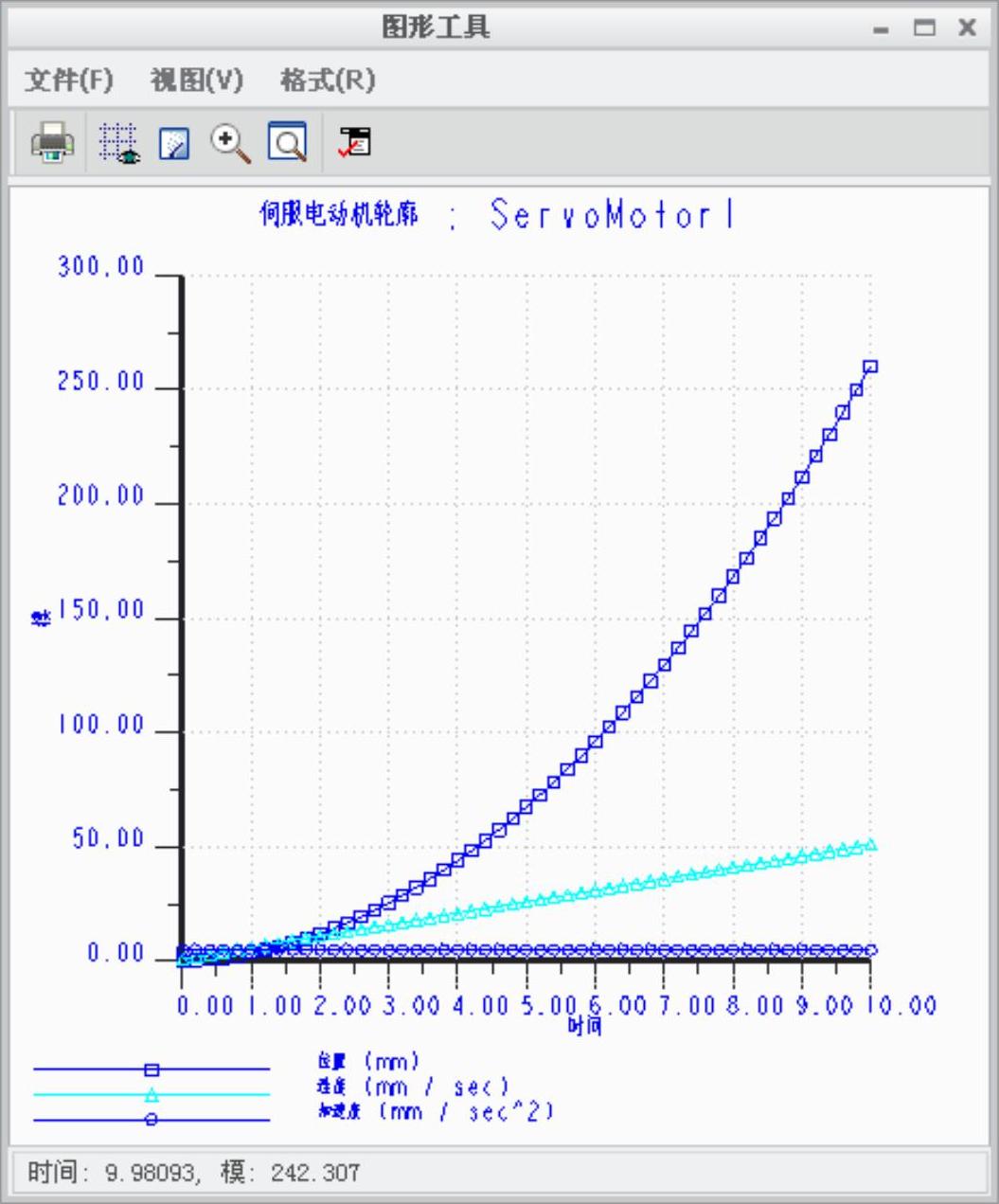
图4.2.10 “图形工具”对话框
3.余弦
该选项可以设置机构的位置、速度和加速度为振荡往复运动,函数表达式为y=A*cos(2*Pi*t/T+B)+C,其中A=振幅,B=相位,C=偏移量,T=周期。
当设置 类型为
类型为 ,且A=1,B=0,C=0,T=4时(图4.2.11),函数图形如图4.2.12所示。
,且A=1,B=0,C=0,T=4时(图4.2.11),函数图形如图4.2.12所示。
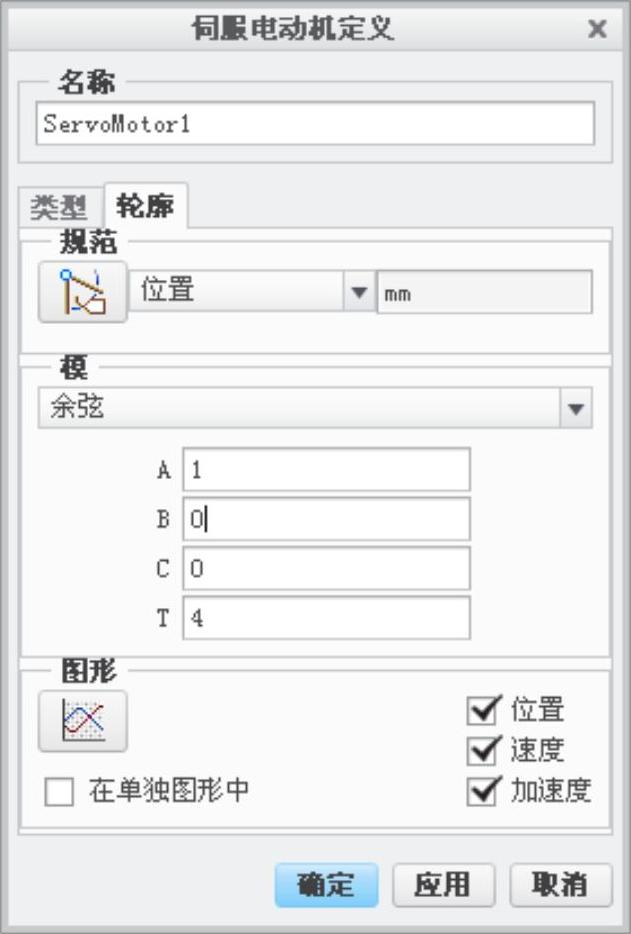
图4.2.1 1设置“余弦”参数
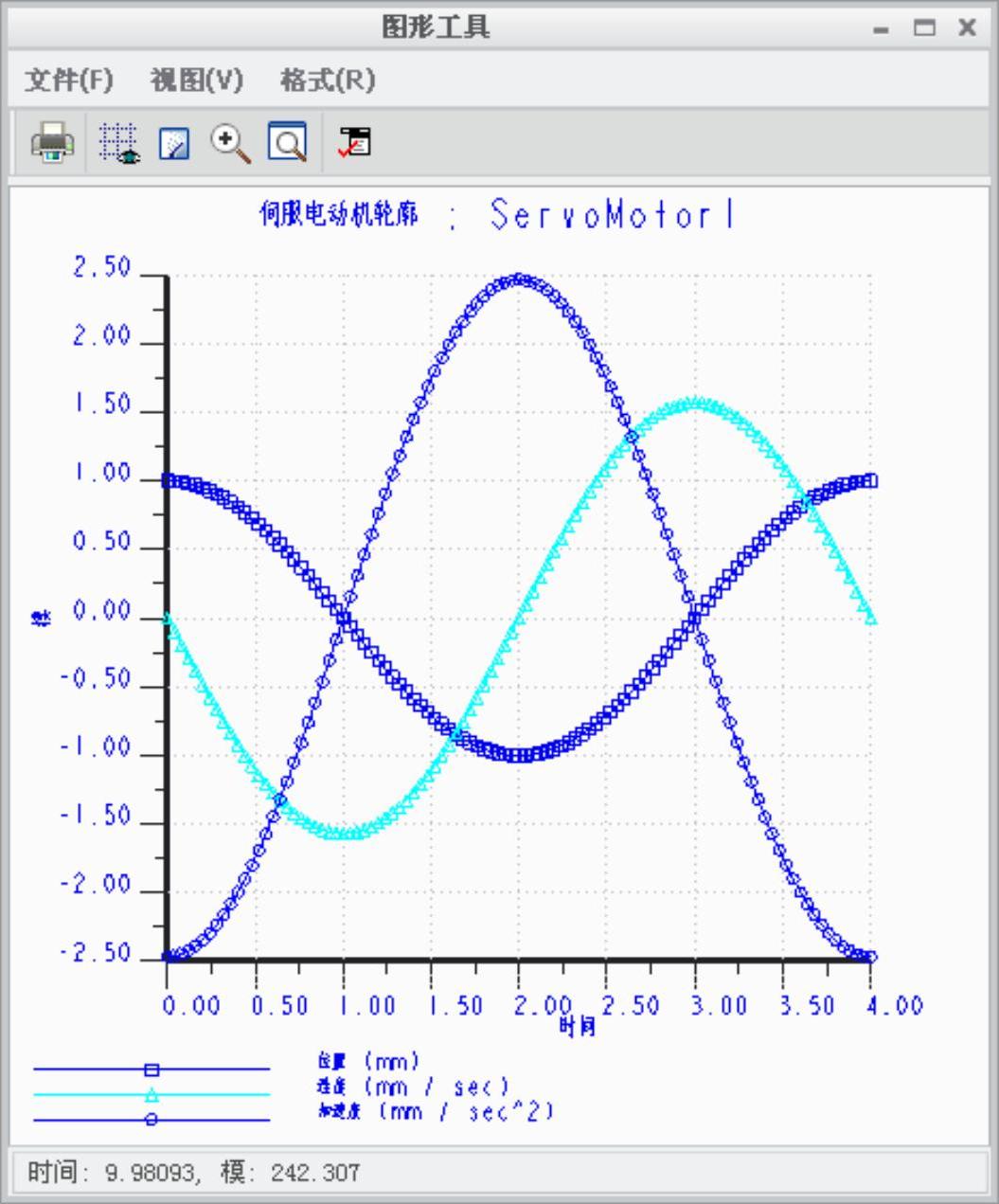
图4.2.12 “图形工具”对话框(www.daowen.com)
4.SCCA
SCCA是指“正弦-常数-余弦-加速度(Sin-Constant-Cos-Acceleration)”,即一条包含正弦、常数、余弦的复合曲线且仅用于加速度的设置。根据时间参数t的范围,表达式分别如下。
●当0≤t<A时,y=H*sin[(t*pi)/(2A)],表示加速度快速增加的过程。
●当A≤t<(A+B)时,y=H,表示加速度恒定不变的过程。
●当(A+B)≤t<(A+B+2C)时,y=H*cos[(t-A-B)*Pi/(2C)],表示加速度减小的过程,并且由大于0减小到小于0。
●当(A+B+2C)≤t<(A+2B+2C)时,y=-H,表示加速度恒定不变且为负值的过程。
●当(A+2B+2C)≤t≤(2A+2B+2C)时,y=-H*cos[(t-A-B-2C)*Pi/(2A)],表示加速度恒增加且依然小于0的过程。
其中A=间增加速度归一化时间部分,B=恒定加速度归一化时间部分,C=递减加速度归一化时间部分,H=振幅,T=周期。这里的“归一化时间部分”是指单个部分的实际时间与周期的比值,计算公式为t=2*t0/T,这里t0=实际的时间,所以对于各“归一化时间部分”,又有A+B+C=1,在设置SCCA函数时,必须给定A、B、H和T的值。
当设置A=0.25,B=0.5,H=1,T=2时(图4.2.13),函数图形如图4.2.14所示。
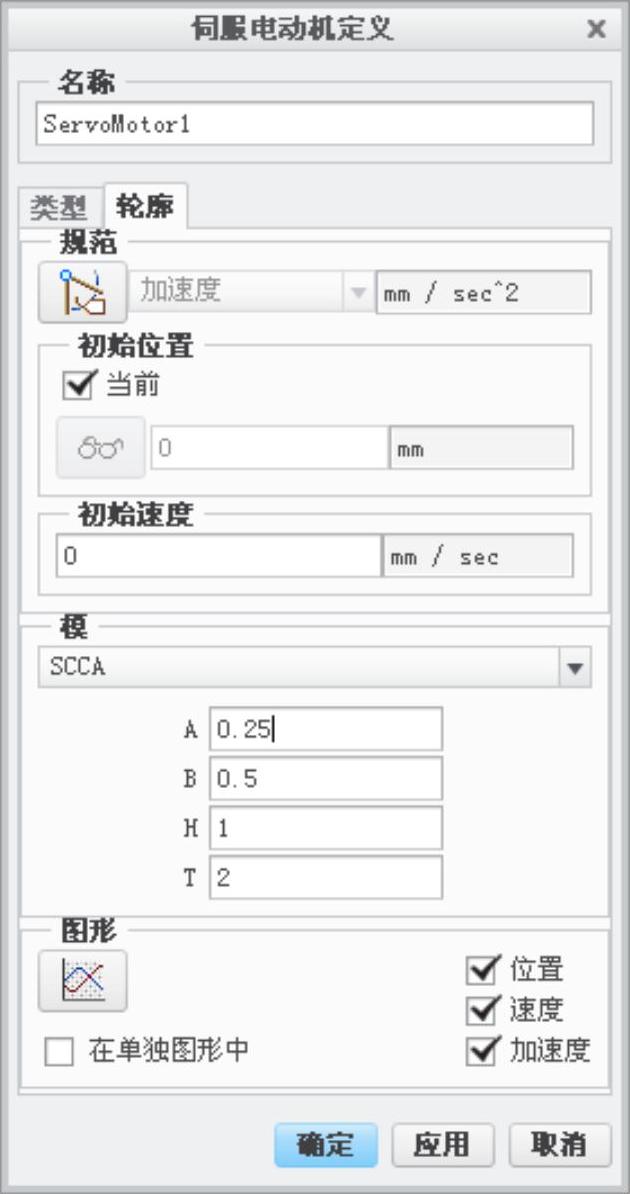
图4.2.13 设置“SCCA”参数
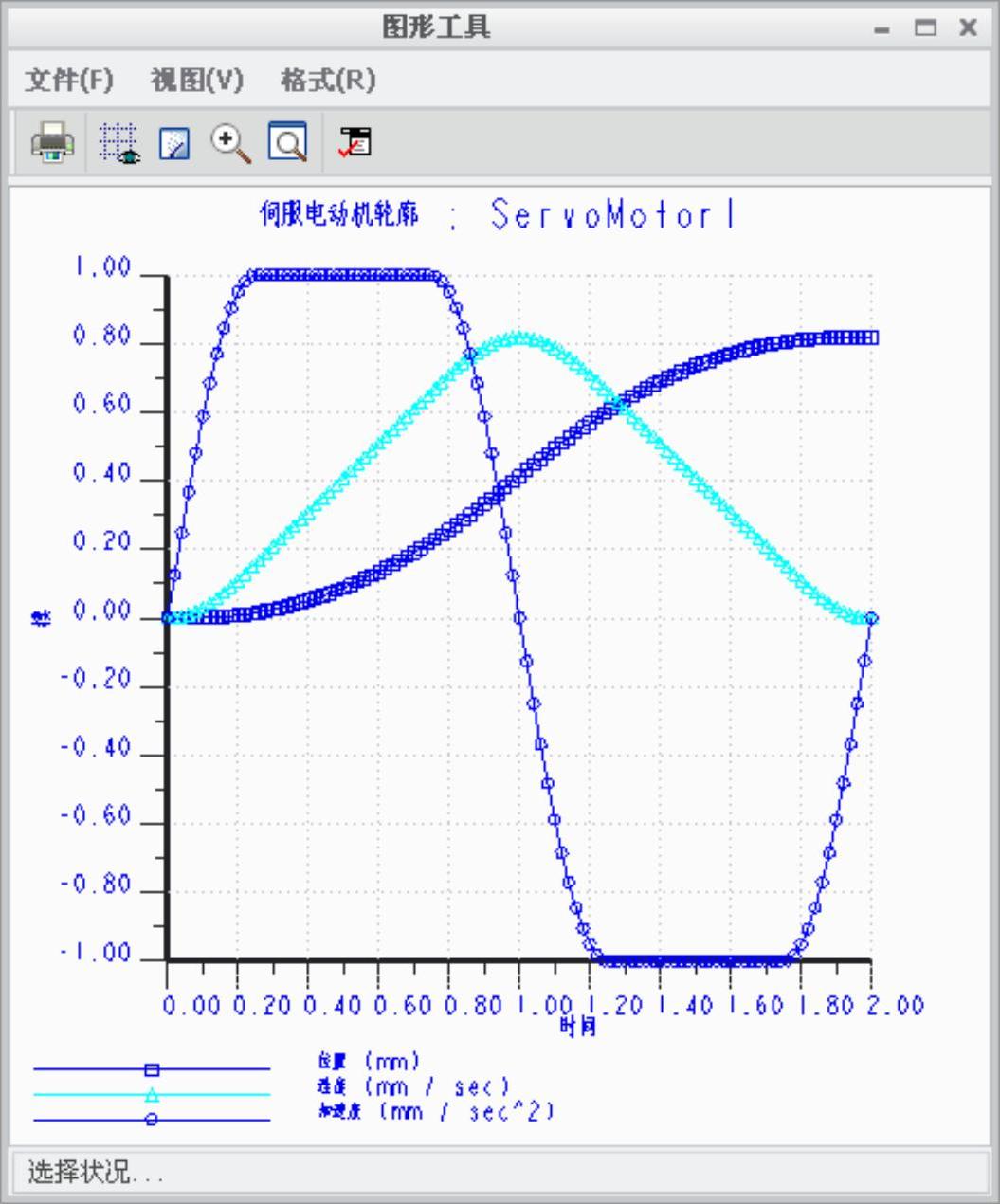
图4.2.14 “图形工具”对话框
5.摆线
该选项可以设置机构的位置、速度和加速度为一种规律性的平缓上升运动,函数表达式为y=L*t/TL*sin(2*Pi*t/T)/2*Pi,其中L=周期内的上升数,T=周期。
当设置 类型为
类型为 ,且L=1,T=5时(图4.2.15),函数图形如图4.2.16所示。
,且L=1,T=5时(图4.2.15),函数图形如图4.2.16所示。
6.抛物线
该选项可以用于设置机构的位置、速度和加速度,函数表达式为y=A*t+0.5*B*t²。其中A=线性系数,B=二次系数。

图4.2.15 设置“摆线”参数
图4.2.16 “图形工具”对话框
当设置 类型为
类型为 ,且A=1,B=10时(图4.2.17),函数图形如图4.2.18所示。
,且A=1,B=10时(图4.2.17),函数图形如图4.2.18所示。
7.多项式
该选项同前面介绍的几种类型类似,可以用于设置机构的位置、速度和加速度,函数表达式为y=A+B*t+C*t²+D*t³。
8.表
该选项可以通过输入或导入时间与对应模的值来定义伺服电动机,当机构的运动规律不能用函数来表达时,可以采用此方法来拟合运动曲线的功能。表文件可以预先进行编制,其扩展名为.tab,可以在任何文本编辑器中创建或打开。文件采用两栏格式,第一栏是时间,该栏中的时间值必须从第一行到最后一行按升序排列;第二栏是速度、加速度或位置。
下面说明使用“表”选项定义伺服电动机的一般操作方法。

图4.2.17 设置“抛物线”参数
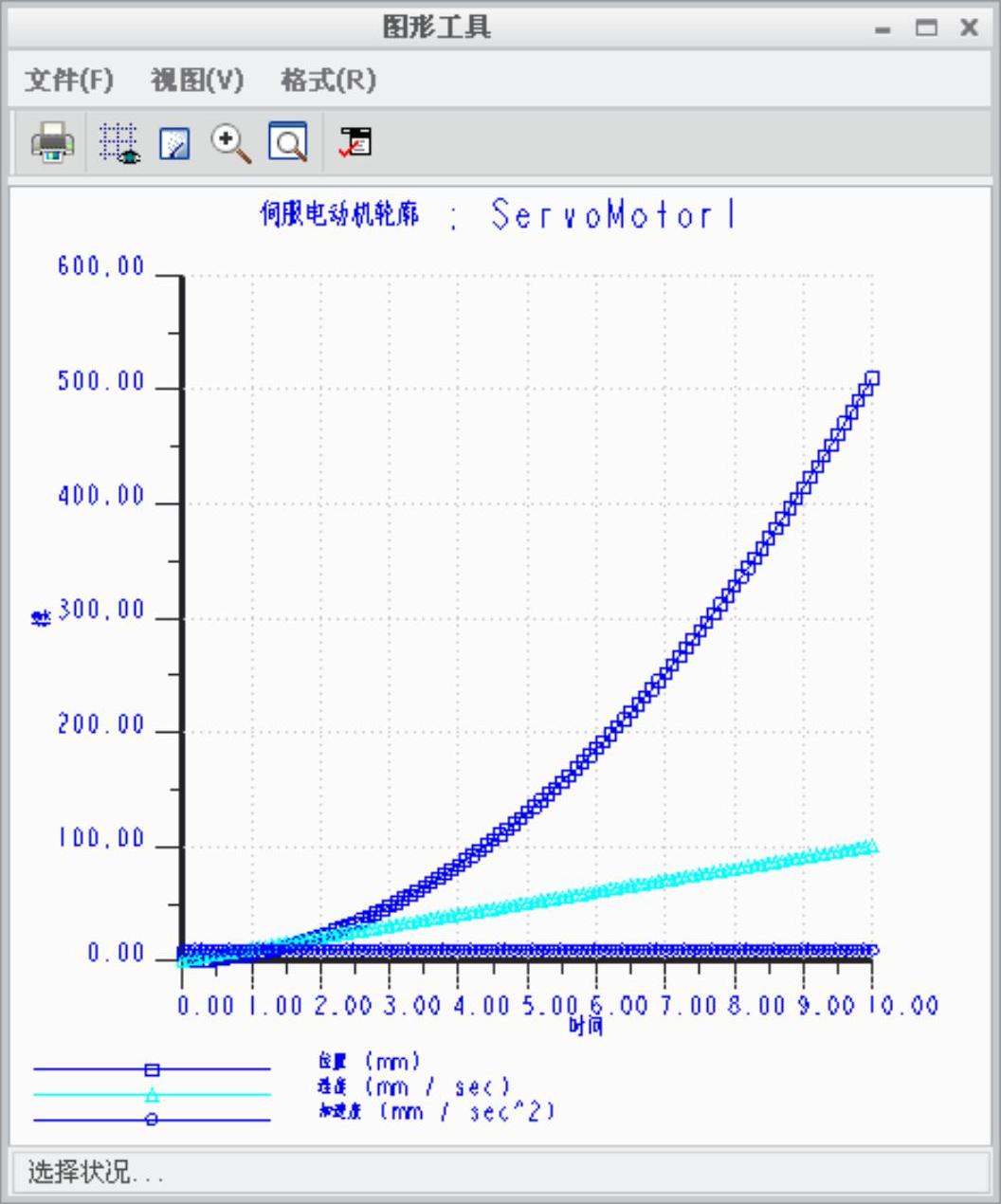
图4.2.18 “图形工具”对话框
Step1.定义伺服电动机类型。在“伺服电动机定义”对话框的 选项卡中选择
选项卡中选择 类型为
类型为 ,在
,在 下拉列表中选择
下拉列表中选择 选项。
选项。
Step2.选择拟合类型。在 区域中选中
区域中选中 单选项。
单选项。
Step3.输入表数据。
(1)定义第1行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值1,在
文本框中输入值1,在 文本框中输入值5。
文本框中输入值5。
(2)定义第2行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值2,在
文本框中输入值2,在 文本框中输入值16。
文本框中输入值16。
(3)定义第3行数据。单击“向表中添加行”按钮 ,在
,在 文本框中输入值4,在
文本框中输入值4,在 文本框中输入值8,如图4.2.19所示。
文本框中输入值8,如图4.2.19所示。
Step4.选中 选项右下方的
选项右下方的 复选框,然后单击图形按钮
复选框,然后单击图形按钮 ,系统弹出图4.2.20所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度轮廓曲线。
,系统弹出图4.2.20所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度轮廓曲线。
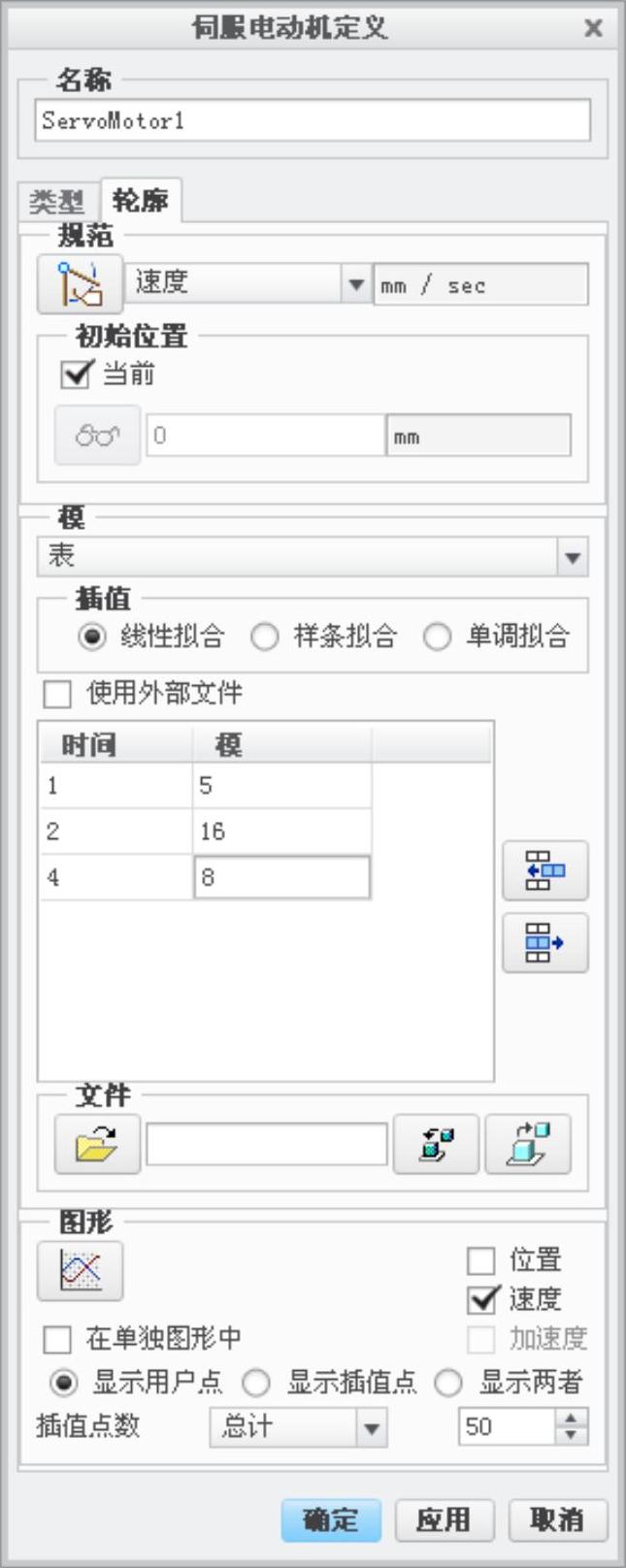
图4.2.19 设置“表”参数
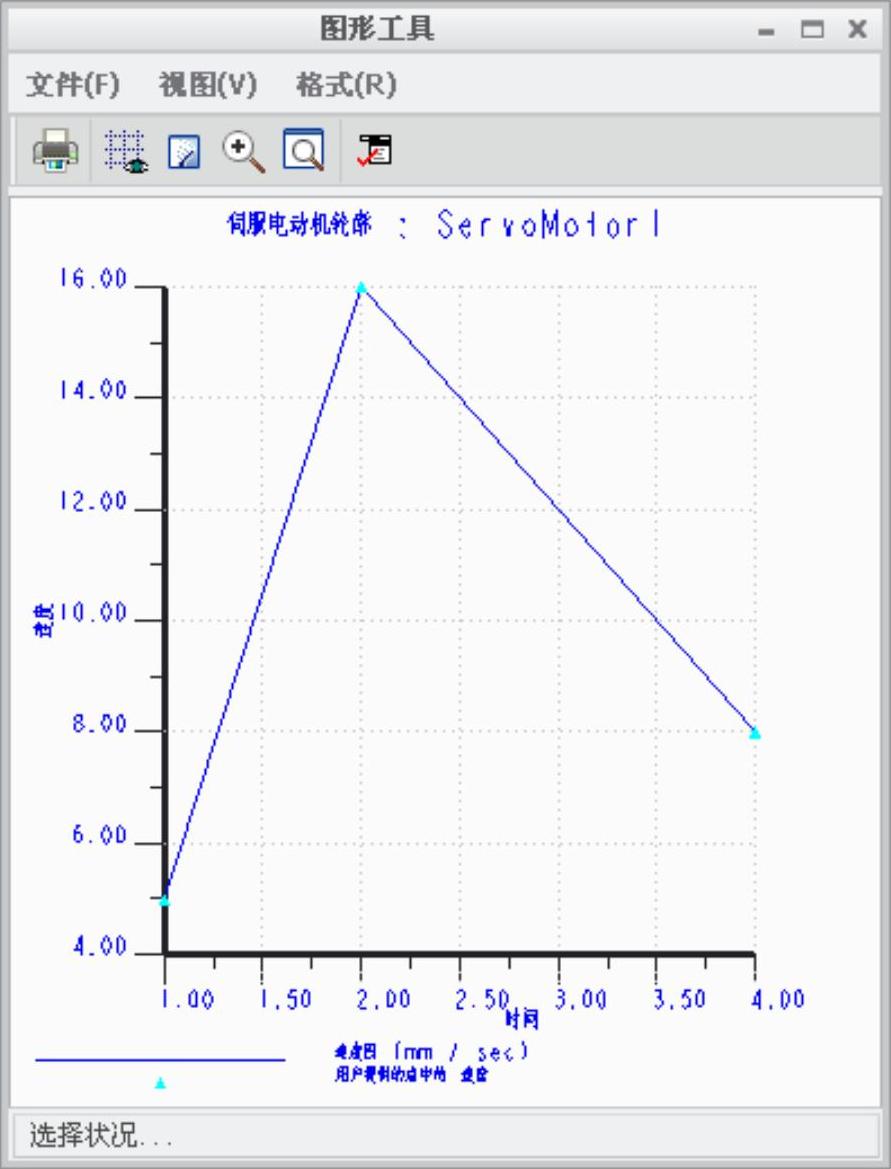
图4.2.20 “图形工具”对话框
说明:如果在 区域中选中
区域中选中 和
和 单选项,伺服电动机的速度轮廓曲线分别如图4.2.21和图4.2.22所示。
单选项,伺服电动机的速度轮廓曲线分别如图4.2.21和图4.2.22所示。
9.用户定义
该选项可以通过自定义函数表达式来定义伺服电动机中的位置、速度和加速度。。
下面说明使用“用户定义”选项定义伺服电动机的一般操作方法。
Step1.定义伺服电动机类型。在“伺服电动机定义”对话框的 选项卡中选择
选项卡中选择 类型为
类型为 ,在
,在 下拉列表中选择
下拉列表中选择 选项。
选项。
Step2.输入表达式数据。单击“添加表达式段”按钮 ,在
,在 文本框中输入表达式10+16*cos(90*t+50),在
文本框中输入表达式10+16*cos(90*t+50),在 文本框中输入时间区域0<t<10,如图4.2.23所示。
文本框中输入时间区域0<t<10,如图4.2.23所示。
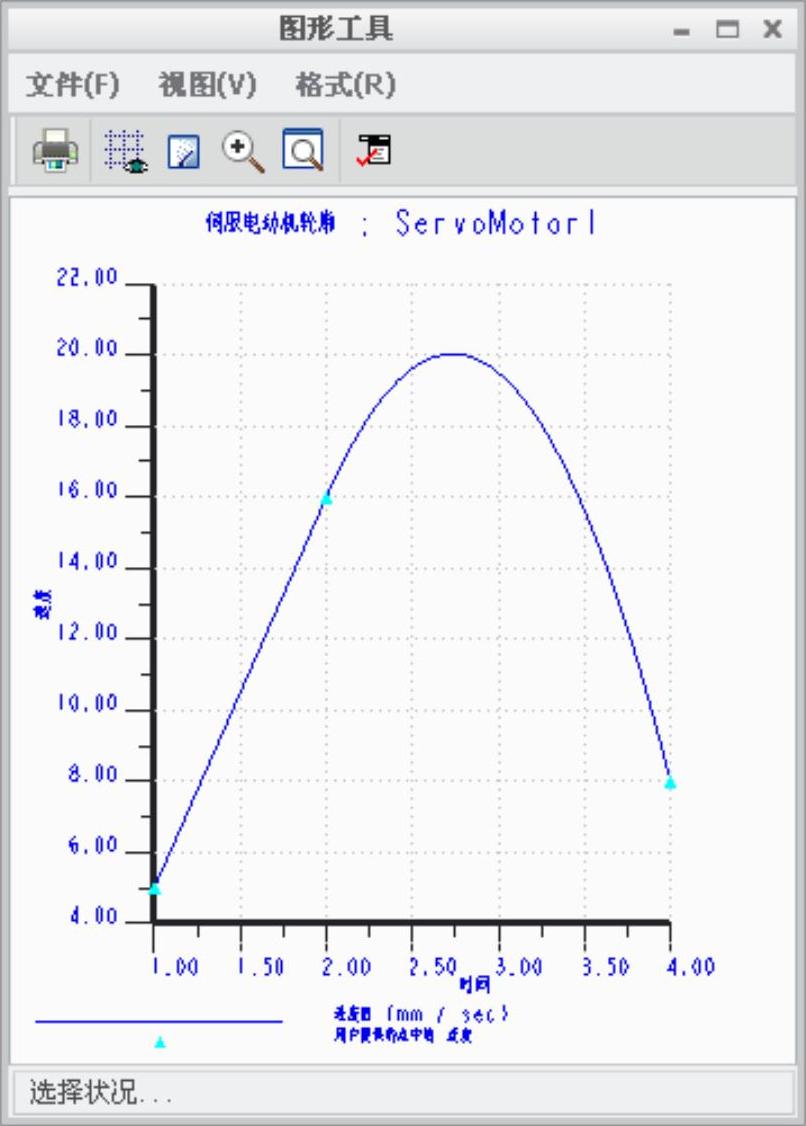
图4.2.21 “样条拟合”速度曲线
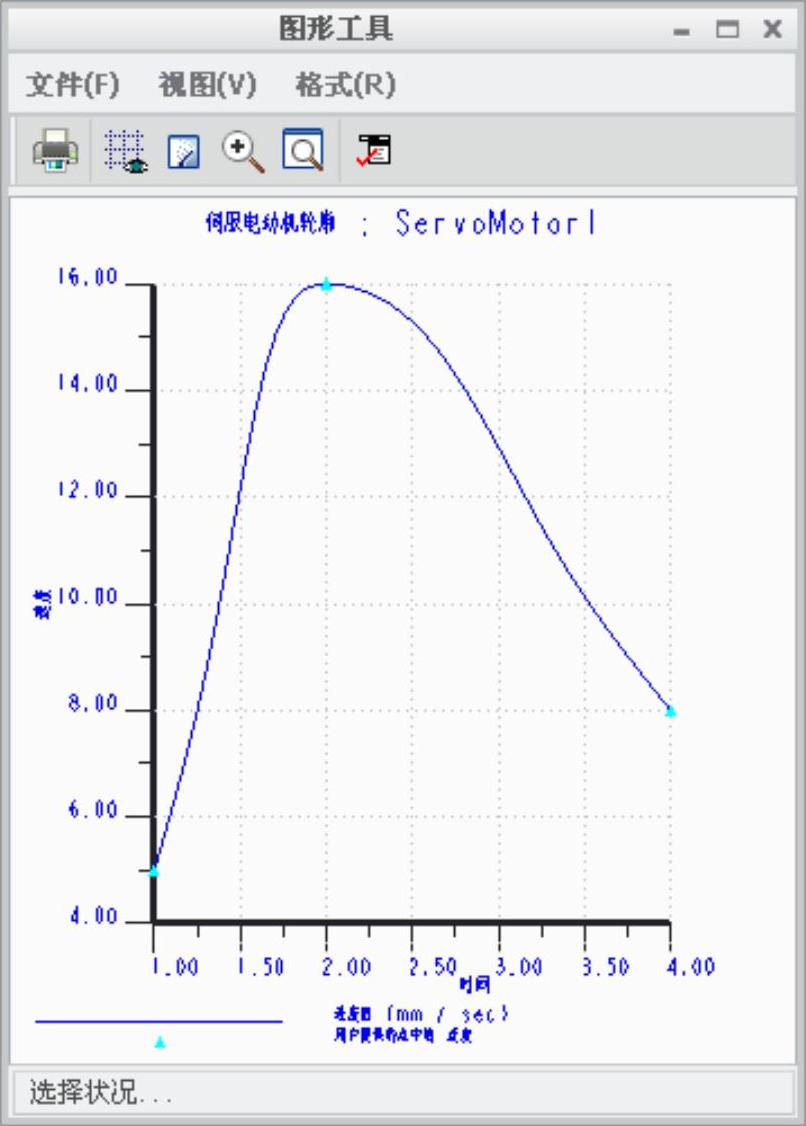
图4.2.22 “单调拟合”速度曲线

图4.2.23 设置“用户定义”参数
Step3.选中 选项右下方的
选项右下方的 复选框,然后单击图形按钮
复选框,然后单击图形按钮 ,系统弹出图4.2.24所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度轮廓曲线。
,系统弹出图4.2.24所示的“图形工具”对话框,该对话框中同时显示伺服电动机的速度轮廓曲线。
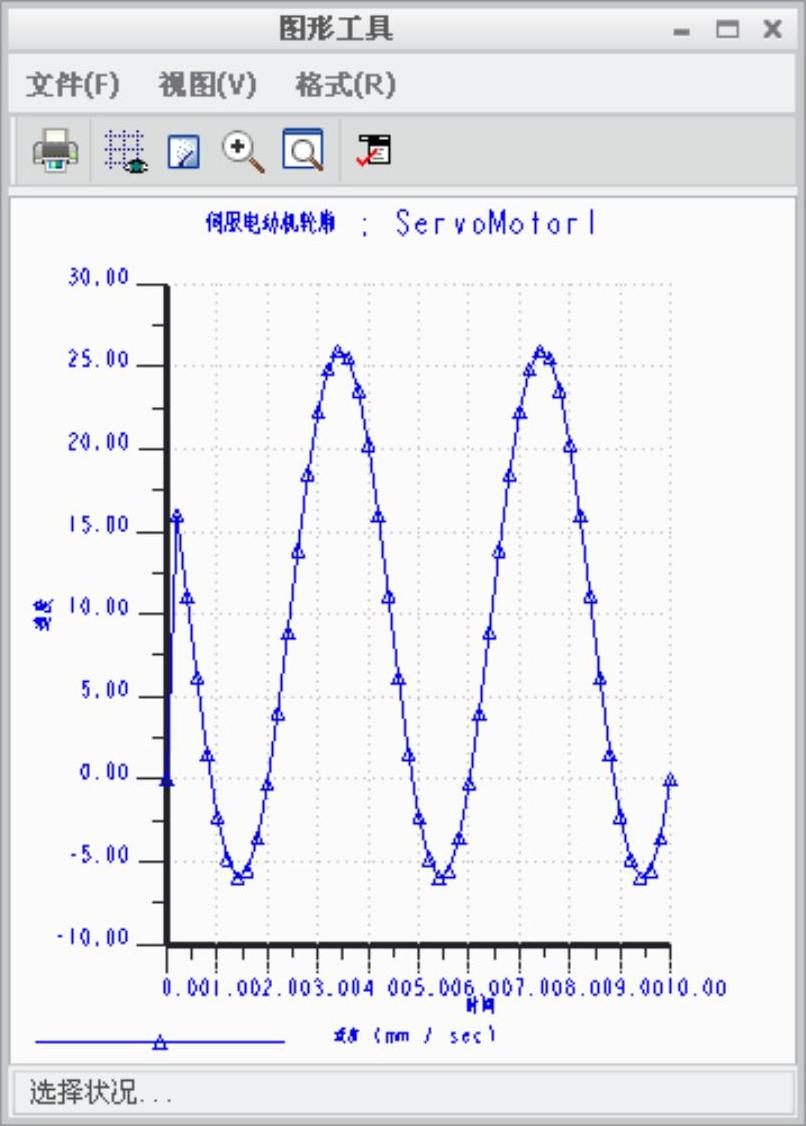
图4.2.24 “图形工具”对话框
说明:如果在“伺服电动机定义”对话框中单击 按钮,系统将弹出图4.2.25所示的“表达式定义”对话框,在该对话框中可以创建和编辑表达式。
按钮,系统将弹出图4.2.25所示的“表达式定义”对话框,在该对话框中可以创建和编辑表达式。
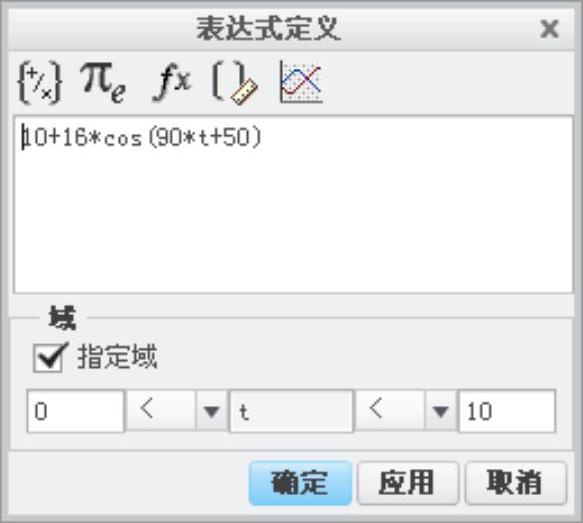
图4.2.25 “表达式定义”对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





