【摘要】:6自由度连接的元件具有3个平移轴和3个旋转轴共6个自由度,创建此连接时,需要选择两个基准坐标系为参考,并能在元件中指定3组点参考来限制3个平移轴的运动限制。新建一个装配模型,命名为6DOF_asm,选取模板。Step3.引入元件6DOF.prt,并使用约束完全约束该元件。Step4.再次引入元件6DOF.prt,并将其调整到图3.12.1所示的位置。图3.12.1 创建6自由度连接图3.12.2 “坐标系对齐”约束参考Step6.单击操控板中的按钮,完成连接的创建。
6自由度(6DOF)连接的元件具有3个平移轴和3个旋转轴共6个自由度,创建此连接时,需要选择两个基准坐标系为参考,并能在元件中指定3组点参考来限制3个平移轴的运动限制。该接头不会影响元件之间的相对运动,可以用于创建伺服电动机和任何连接方式。
举例说明如下:
Step1.将工作目录设置至D:\creo2.16\work\ch03\ch03.12。
Step2.新建文件。新建一个装配模型,命名为6DOF_asm,选取 模板。
模板。
Step3.引入元件6DOF.prt,并使用 约束完全约束该元件。
约束完全约束该元件。
Step4.再次引入元件6DOF.prt,并将其调整到图3.12.1所示的位置。
Step5.创建6自由度连接。
(1)在连接列表中选取 选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的
选项,此时系统弹出“元件放置”操控板,单击操控板菜单中的 选项卡。
选项卡。
(2)定义“坐标系对齐”约束。选取图3.12.1所示的两个坐标系为约束参考,此时 界面如图3.12.2所示。(www.daowen.com)
界面如图3.12.2所示。(www.daowen.com)
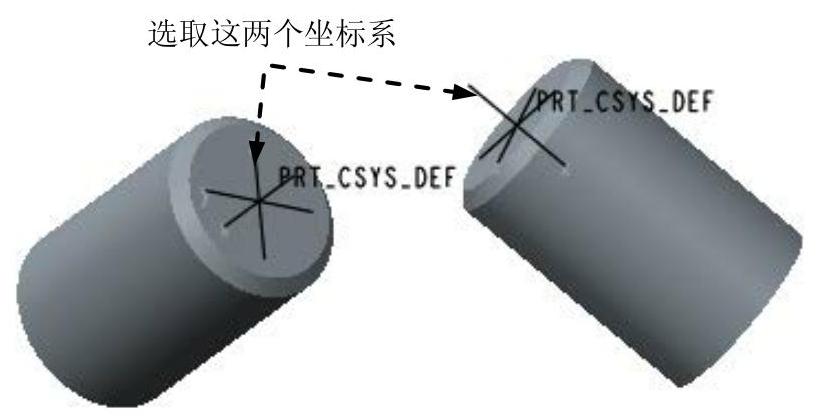
图3.12.1 创建6自由度(6DOF)连接
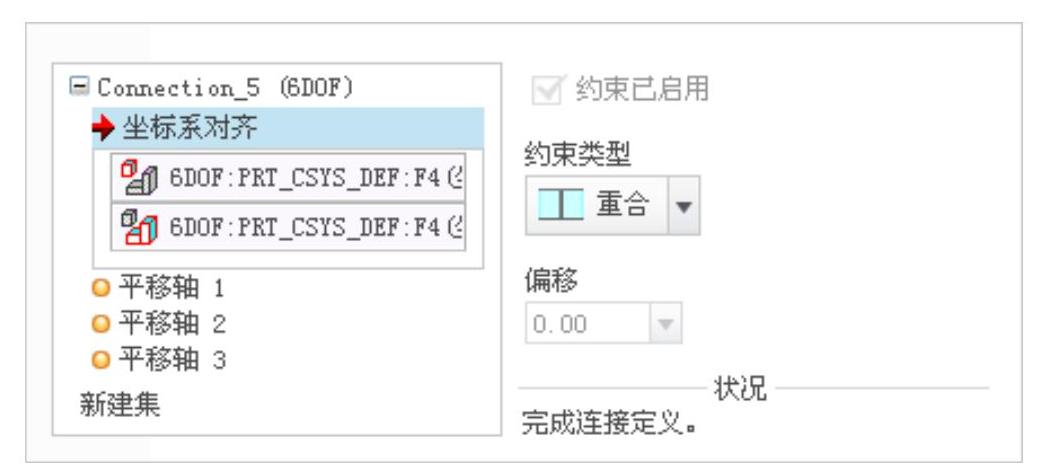
图3.12.2 “坐标系对齐”约束参考
Step6.单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step7.拖动验证。单击“拖动元件”按钮 ,尝试拖动第二次引入的零件,验证连接。
,尝试拖动第二次引入的零件,验证连接。
Step8.再生机构模型,然后保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






