
当机构装配完成后,即可进入仿真模块进行运动仿真。在开始仿真之前,需要设置机构中主要部件的初始位置,这样可以使机构的每次仿真都从初始位置开始运行,保证运动仿真的一致性和分析的准确性。否则,机构运动仿真将从当前位置或上一次仿真的结束位置开始运行。
设置初始位置一般需要和拖动命令一起配合使用,在机构模块中,单击 功能选项卡
功能选项卡 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,可以用鼠标对主体进行“拖移(Drag)”。该功能可以验证连接的正确性和有效性,并使我们能深刻理解机构装置的行为方式,以及如何以特殊格局放置机构装置中的各元件。在拖移时,还可以借助接头禁用和主体锁定功能来研究各个部分机构装置的运动。拖移过程中,可以对机构装置进行拍照,这样可以对重要位置进行保存。拍照时,可以捕捉现有的锁定主体、禁用的连接和几何约束。
,可以用鼠标对主体进行“拖移(Drag)”。该功能可以验证连接的正确性和有效性,并使我们能深刻理解机构装置的行为方式,以及如何以特殊格局放置机构装置中的各元件。在拖移时,还可以借助接头禁用和主体锁定功能来研究各个部分机构装置的运动。拖移过程中,可以对机构装置进行拍照,这样可以对重要位置进行保存。拍照时,可以捕捉现有的锁定主体、禁用的连接和几何约束。
拖动元件的方法有点拖动和约束定位。在拖动元件时,如果该机构无需定义一个准确的初始位置,可以采用“点拖动”的方法定义大致位置即可,该方法与前文中介绍的快捷移动方法(Ctrl键和Shift键配合拖动)较相似。如果机构初始位置要求较准确,可以采用高级拖动和约束定位的方法来定位元件。
下面以本章2.3小节中装配完成的机构模型为例,说明设置初始位置状态的一般过程。
Step1.将工作目录设置为D:\creo2.16\work\ch02\ch02.04,打开文件linkage_mech.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
Step3.选择拖动命令。单击 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,系统弹出图2.4.1所示的“拖动”对话框。
,系统弹出图2.4.1所示的“拖动”对话框。

图2.4.1 “拖动”对话框
Step4.采用点拖动记录快照1。
(1)在“拖动”对话框中确认“点拖动” 按钮被按下,在机构中单击图2.4.2所示的连杆1,可以观察到连杆1上出现拖动点(显示为小方块,拖动点的位置与选择连杆1时单击的位置有关),如图2.4.3所示。
按钮被按下,在机构中单击图2.4.2所示的连杆1,可以观察到连杆1上出现拖动点(显示为小方块,拖动点的位置与选择连杆1时单击的位置有关),如图2.4.3所示。
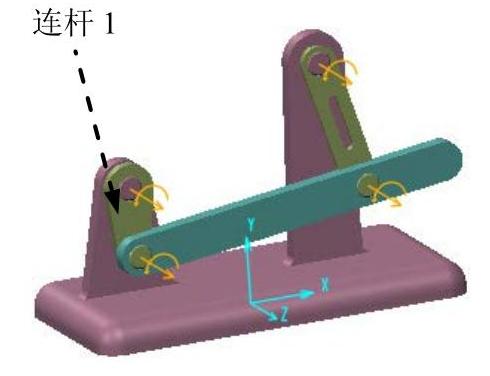
图2.4.2 拖动连杆1
图2.4.3 快照1
(2)此时移动鼠标,即可按照机构的连接条件使机构运动。
(3)拖动连杆1至图2.4.3所示的大致位置,再单击鼠标左键。
拖动元件时鼠标的操作说明如下:
●鼠标左键:接受当前主体的位置;
●鼠标中键:取消刚才执行的拖移;
●鼠标右键:取消刚才进行的拖移,并退出“拖动”对话框。
(4)记录快照1。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照1(Snapshot1)。
按钮,即可记录当前位置为快照1(Snapshot1)。
注意:移动时不要按住鼠标左键不放,单击选择拖动点后,松开左键再移动鼠标。
图2.4.1所示的“拖动”对话框中的部分功能按钮说明如下:
● :显示选定的快照,将机构中的位置调整为快照中记录的位置。
:显示选定的快照,将机构中的位置调整为快照中记录的位置。
● :将当前快照中某个元件的位置替换为其他快照中的位置。
:将当前快照中某个元件的位置替换为其他快照中的位置。
● :以当前屏幕中的元件位置替代快照中的位置。
:以当前屏幕中的元件位置替代快照中的位置。
● :选定的快照可以被导入到工程图中。
:选定的快照可以被导入到工程图中。
● :删除选定的快照。
:删除选定的快照。
Step5.采用定向约束记录快照2。
(1)在“拖动”对话框中单击图2.4.4所示的 选项卡,然后单击“定向”按钮
选项卡,然后单击“定向”按钮 。
。
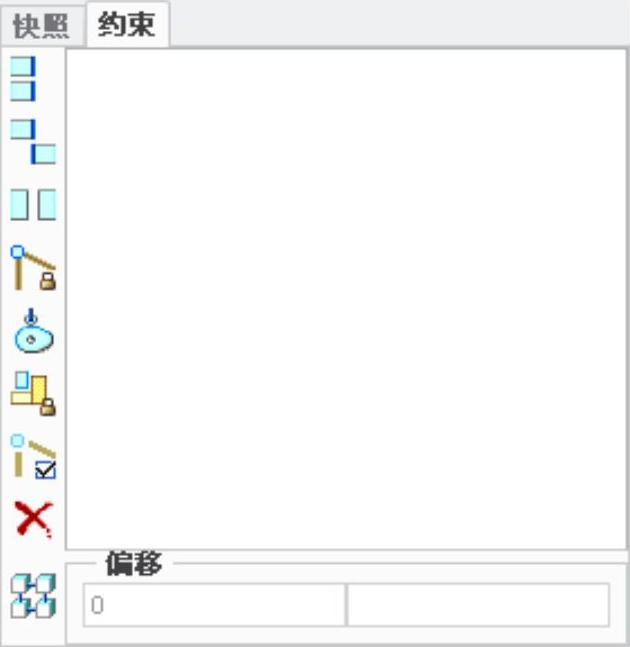
图2.4.4 “约束”选项卡
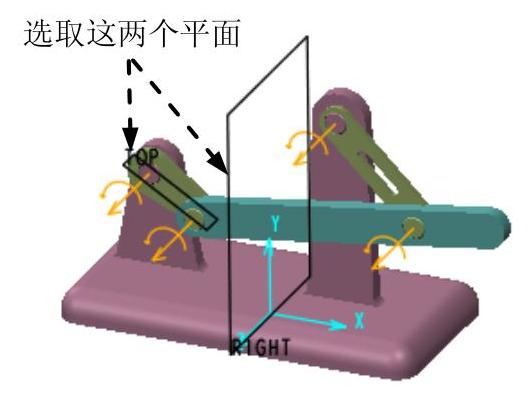
(2)在模型中选取图2.4.5所示的基座(base)中的基准平面RIGHT与连杆1(ROD_1)中的基准平面TOP为定向参考,定义这两个平面将平行定位,如图2.4.6所示。
说明:这里的约束仅用于当前快照中的元件定位,元件的拖动将受到约束的限制,但对其他快照以及机构原先的机械连接均无影响。
 (www.daowen.com)
(www.daowen.com)
图2.4.5 选取定向参考
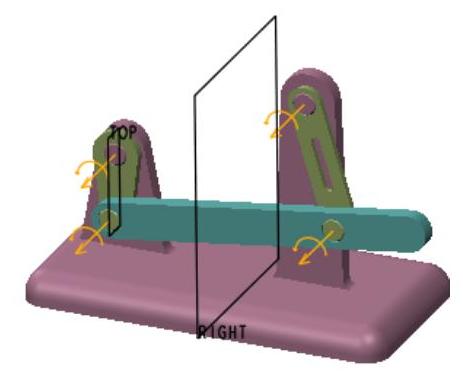
图2.4.6 定向结果
图2.4.4所示的“拖动”对话框中的“约束”选项卡部分功能按钮说明如下:
● (对齐两个图元):选择元件中的两个点、线或平面对齐。
(对齐两个图元):选择元件中的两个点、线或平面对齐。
● (配对两个图元):选择两个平面配对。
(配对两个图元):选择两个平面配对。
● (定向两个曲面):选择两个平面使其平行或成一定角度,角度值可以在“约束”选项卡下方的“偏移”文本框中输入。
(定向两个曲面):选择两个平面使其平行或成一定角度,角度值可以在“约束”选项卡下方的“偏移”文本框中输入。
● (运动轴约束):通过设置运动轴的值来指定元件位置。
(运动轴约束):通过设置运动轴的值来指定元件位置。
● (主体-主体锁定约束):将两个主体锁定在一起。
(主体-主体锁定约束):将两个主体锁定在一起。
● (启用/禁用连接):将机构中的某个连接禁用。
(启用/禁用连接):将机构中的某个连接禁用。
● (删除选定约束):删除选中的约束。
(删除选定约束):删除选中的约束。
● (仅基于约束重新连接):其后的文本框中可以输入“对齐”与“配对”约束的偏移距离,“定向”约束的角度以及“运动轴”约束的值。
(仅基于约束重新连接):其后的文本框中可以输入“对齐”与“配对”约束的偏移距离,“定向”约束的角度以及“运动轴”约束的值。
(3)记录快照2。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照2(Snapshot2)。
按钮,即可记录当前位置为快照2(Snapshot2)。
Step6.采用定向约束记录快照3。
(1)在“拖动”对话框中单击 选项卡,如图2.4.7所示,然后双击“Snapshot1”,将模型位置调整到快照1。
选项卡,如图2.4.7所示,然后双击“Snapshot1”,将模型位置调整到快照1。
(2)单击 选项卡,单击“运动轴约束”按钮
选项卡,单击“运动轴约束”按钮 ,选取图2.4.8所示的运动轴为定义对象。
,选取图2.4.8所示的运动轴为定义对象。
图2.4.7 “快照”选项卡
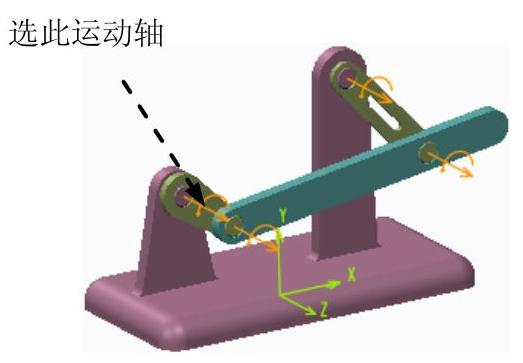
图2.4.8 选取运动轴
(3)在图2.4.9所示的 按钮右侧的文本框中输入值-15,并按Enter键。
按钮右侧的文本框中输入值-15,并按Enter键。
(4)记录快照3。单击对话框 区域中的
区域中的 按钮,即可记录当前位置为快照3(Snapshot3),如图2.4.10所示。
按钮,即可记录当前位置为快照3(Snapshot3),如图2.4.10所示。
图2.4.9 输入约束值
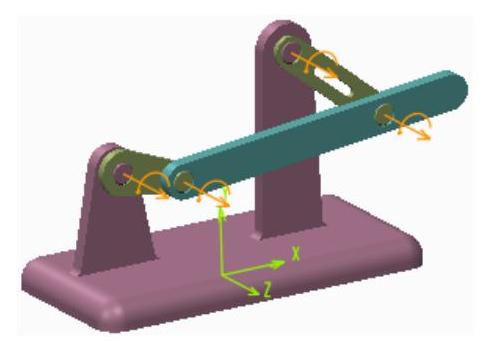
图2.4.10 快照3
Step7.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生模型。
,再生模型。
Step8.保存机构模型。
说明:
●要将“快照”用作机构装置的分解状态,可在“拖动”对话框中的 选项卡中选取一个或多个快照,然后单击
选项卡中选取一个或多个快照,然后单击 按钮,这样这些快照便可在“装配模块”和“工程图”中用作分解状态。如果改变快照,分解状态也会改变。当修改或删除一个快照,而分解状态在此快照中处于使用状态的时候,需注意以下几点:
按钮,这样这些快照便可在“装配模块”和“工程图”中用作分解状态。如果改变快照,分解状态也会改变。当修改或删除一个快照,而分解状态在此快照中处于使用状态的时候,需注意以下几点:
☑对快照进行的任何修改将反映在分解状态中。
☑如果删除快照,会使分解状态与快照失去关联关系,分解状态仍然可用,但独立于任何快照。如果接着创建的快照与删除的快照同名,分解状态就会与新快照关联起来。
●在“拖动”对话框的 选项卡中单击按钮
选项卡中单击按钮 (主体-主体锁定约束),然后先选取一个导引主体,再选取一组要在拖动操作期间锁定的随动主体,则拖动过程中随动主体相对于导引主体将保持固定,它们之间就如同粘接在一起,不能相互运动。这里请注意下列两点:
(主体-主体锁定约束),然后先选取一个导引主体,再选取一组要在拖动操作期间锁定的随动主体,则拖动过程中随动主体相对于导引主体将保持固定,它们之间就如同粘接在一起,不能相互运动。这里请注意下列两点:
☑要锁定在一起的主体不需要接触或邻接。
☑关闭“拖动”对话框后,所有的锁定将被取消,也就是当开始新的拖移时,将不锁定任何主体或连接。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





