1.应用
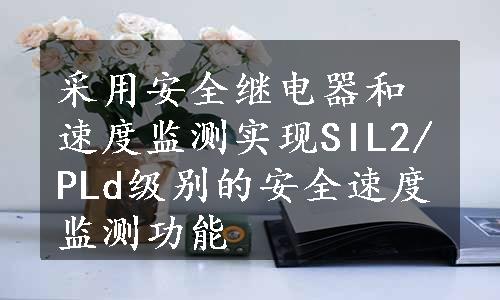
采用两个速度监测继电器和一个安全继电器对电动机速度进行监测,如图4-95所示。由于采用了输入信号的冗余结构设计,确保了即使其中的一个速度监测继电器出现故障,即出现了单通道故障,从而导致这一检测通道无法发出正确的电动机检测信号,电动机速度也不会超出其限制值,从而避免工作人员因加工件被甩出而受到伤害。
2.设计
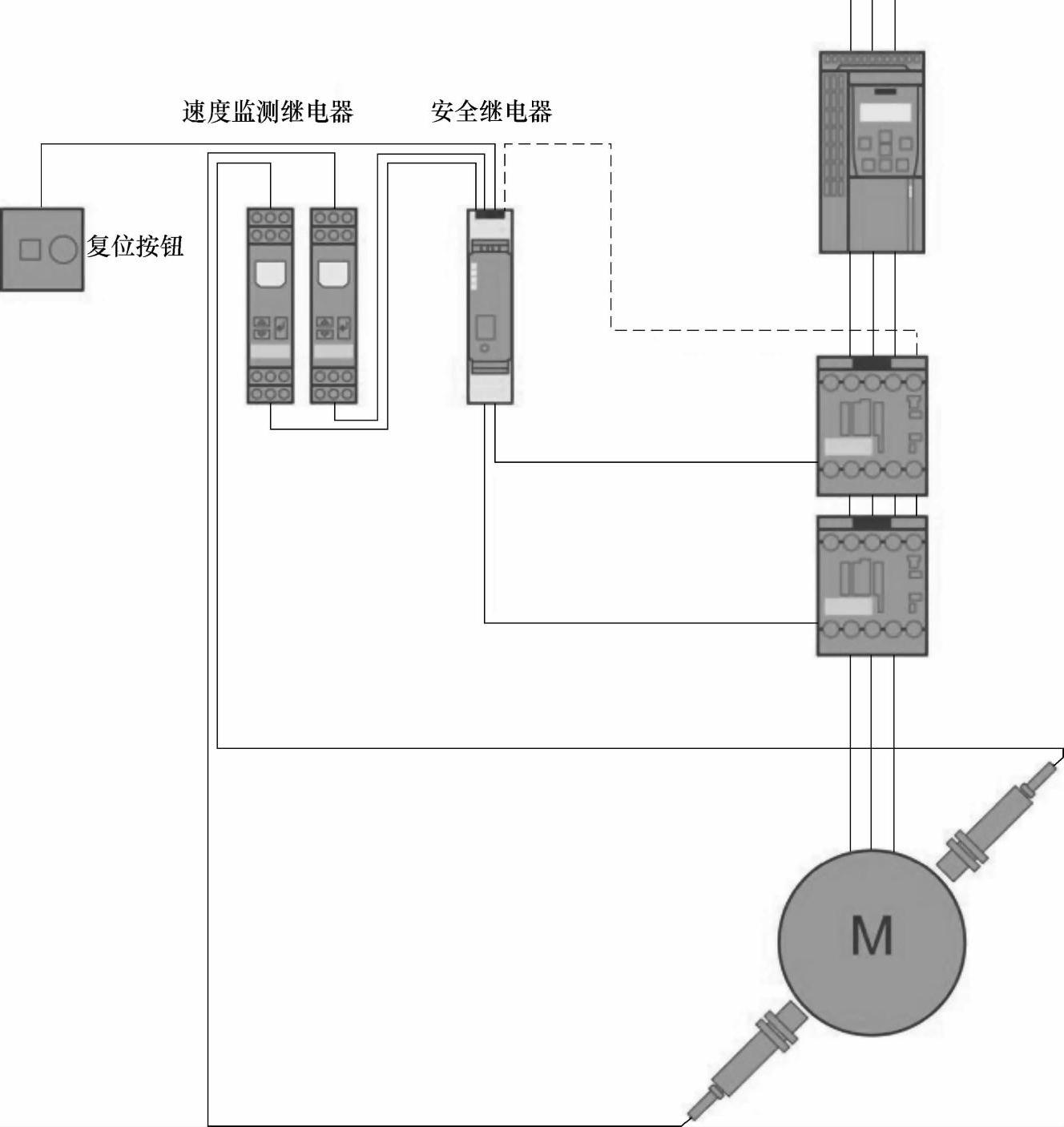
图4-95 安全速度监测功能
3.工作原理
采用两个标准的速度监测继电器同时进行速度监测的结构设计,最高可以实现安全等级SIL2或PLd的要求(见图4-96)。
这种情况下,两个速度监测继电器上都需要设置某个特定的速度或速度范围(上限值和下限值)。这些速度监测继电器不间断地监测电动机的转速,并通过继电器的触头的导通和关断的状态来指示其当前的转速值是否超过设定的速度极限值或者速度范围。
安全继电器将监测这些速度监测继电器的触头的导通和关断的状态,这些信号用来描述监测到的速度之间的差异,以及双通道间是否存在短路故障等。
如果电动机的实际转速超过了设定的速度限值,或者超出了速度范围,则电动机将立即被安全地关机。
图4-96 最高安全等级
而当速度又降至设定的速度极限值以下(即允许的速度范围之内),或者处于停机状态时,并且此时的反馈回路正好处于闭合状态,则可以使用“复位”按钮重新起动电动机。
注:
在传感器的回路设计中,同时应用两个监测继电器对速度这一过程变量进行检测,有可能出现某一个监测继电器先于另一个监测继电器监测到速度超过设定的限值的现象。设备(如变频器)和外部传感器(如增量型编码器)的设置偏差或测量偏差也有可能是导致这一问题的原因。
上例中,速度连续上升时,其中一个监测继电器会在一段很短的时间内先于另一个监测继电器监测到速度超过设定的限值的现象。此时,驱动装置的电源将被切断。速度也随之下降。在相应的安全评估装置(如安全继电器)中,由于需要对输入信号进行同步输入的状态监测,因此这种不一致性误差依然有效。两个通道都进行零位重置后,才能再次起动应用。这种情况下,必须检查并手动地复位这些监测继电器。
对缓慢上升的过程变量进行监测时,也可能出现这种现象。而避免出现不一致误差的方法如下:
1)根据经验计算出需要设置的相关参数,以便尽量保证监测继电器的输出信号的同步性;
2)对外部传感器(如增量型编码器)采用完全相同的设计(传感器的型号、电缆长度等完全相同)。(www.daowen.com)
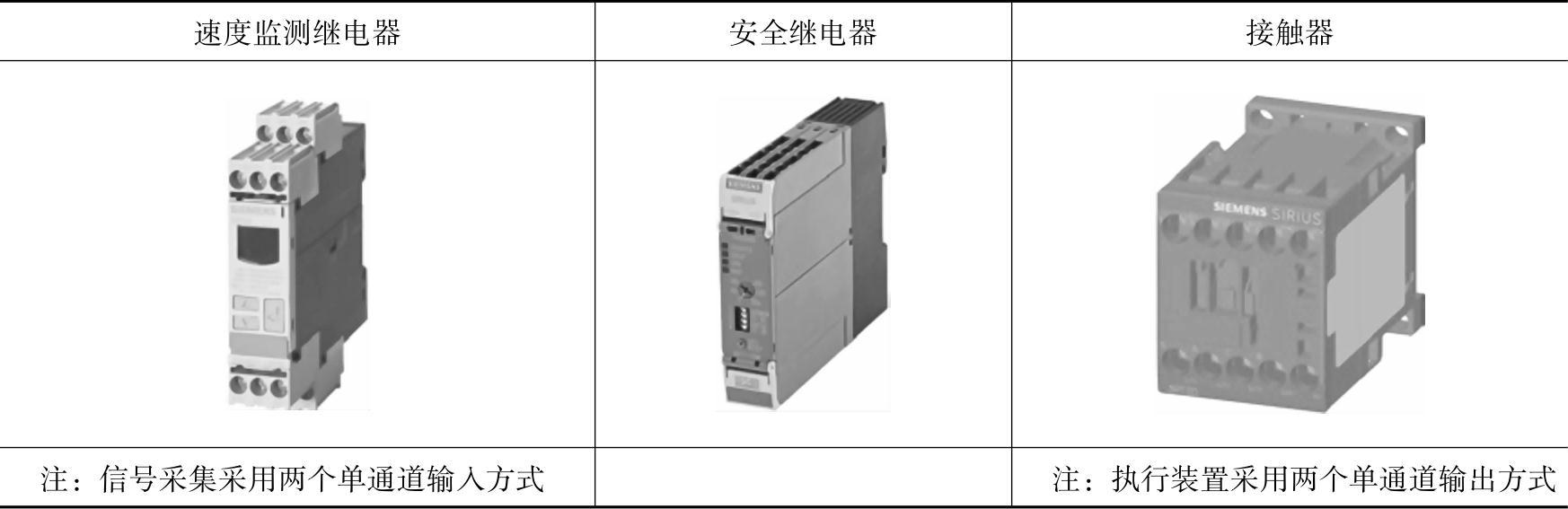
4.安全组件(见表4-25)
5.安全功能的计算
通过安全评价工具(Safety Evaluation Tool,SET),可以对于上述的应用进行验证。
(http://support.automation.siemens.com/WW/view/en/69065516)
6.应用示例
表4-25 安全组件
注:
1.示例中应用的安全继电器和速度监测继电器,未指明具体品牌和型号,但尽量选取有代表性的型号。
2.示例中必须采用强制断开结构设计的安全门开关、执行装置(如接触器)。
3.实际使用中,使用者必须参考安全继电器和速度监测继电器生产厂商提供的具体型号产品的关于安装、调试、应用的技术手册,再确定具体的接线方式。
4.安全继电器和速度监测继电器上电前,必须确认连接方式的正确性。
5.速度监测继电器需要预先设定相关参数,严禁带电进行设定或调整。
在图4-97中,两个标准的速度检测继电器分别通过行程开关-B1和-B2来监测受控装置-M1的运行状态,而安全继电器-A1则用来监测两个速度监测继电器的信号差异性以及进行短路检测。
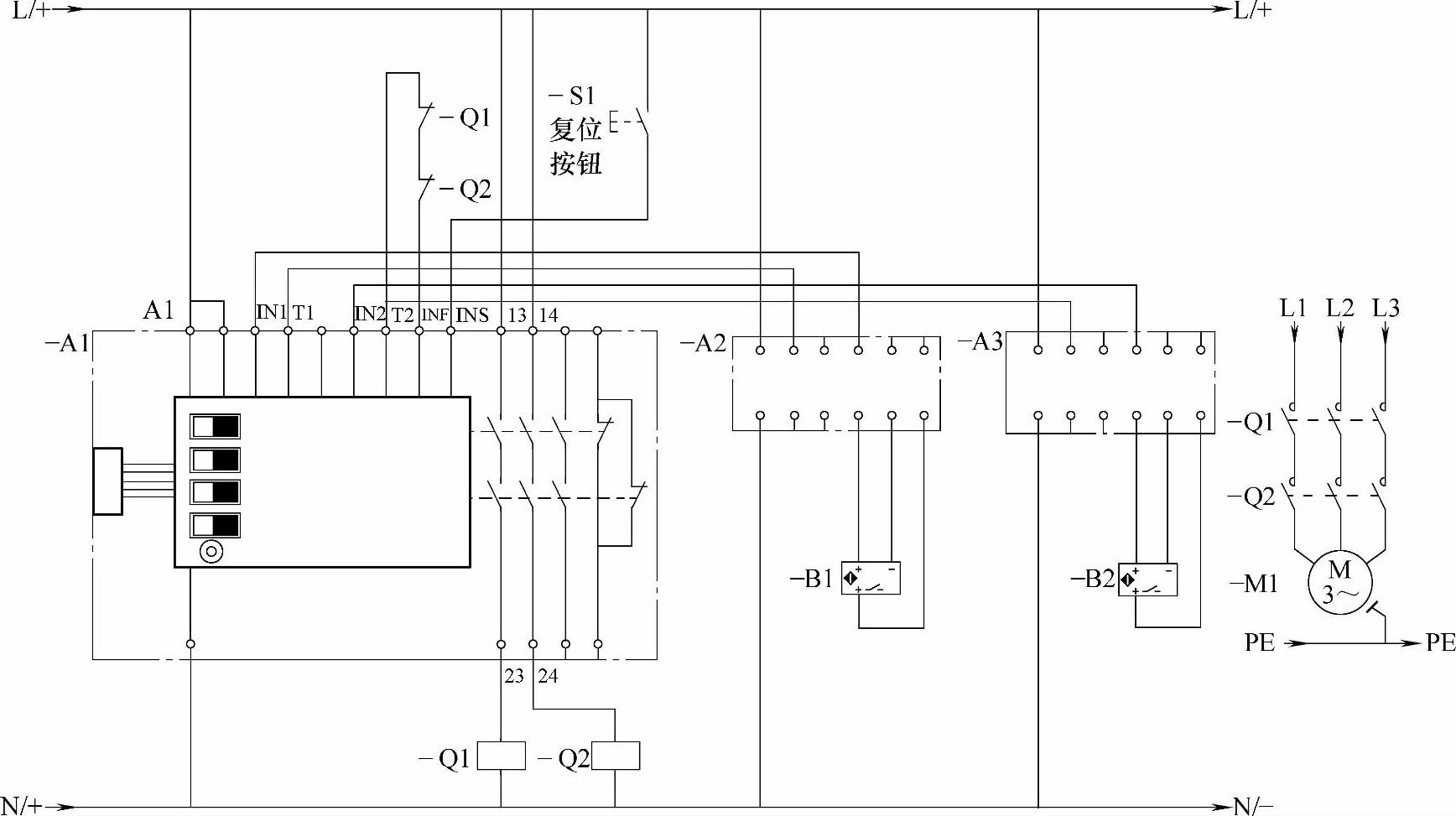
图4-97 安全速度监测应用示例
如果受控装置-M1的实际运行速度超过了设定的安全速度范围,则安全继电器使得执行装置-Q1和-Q2的线圈失电,同时串联的主触点处于断开状态,受控装置-M1停止运转。
如果受控装置-M1的实际运行速度再次低于设定的最高限速或者处于安全速度范围内,或者处于停止运行的状态,同时反馈回路也处于闭合的状态,则可以通过按下“复位”按钮-S1再次使受控装置-M1投入运行状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






