本节以安全防护门为例,介绍带有分离式保护装置(如安全开关和操动头)的应用,如图4-23所示。
工厂和机械工业领域的工作现场,经常会有人/机混杂的情况。最常用的解决方案是采用能够可靠地实现人/机隔离的保护装置(即安全防护门)对危险区域进行防护。其目的在于监测由于非工作需要而接触某台机器或机器的部件,从而产生误动作,以及阻止在保护装置未闭合(如安全门没有关闭)的情况下机器进入危险运行状态,从而造成不必要的伤害。
除了采用常见的基于电磁技术或RFID技术的非接触型安全门开关之外,也可以采用机械式行程开关或安全门开关对需要采取保护措施的机器进行监测。
此外,防护门监测技术常常与闭锁机构组合起来一起使用。带有闭锁机构的联锁装置用于防止人员意外地进入危险区域。通常有以下两个原因:
1)防止由于机器的运动超过设定的行程、高温等原因对于人员可能造成的伤害。对于联锁装置的设计和选型,标准“ISO 14119机械安全带有联锁装置的保护装置设计和选择原则”或“EN 1088机械安全带有联锁装置的保护装置设计和选择原则”(即“GB/T 18831—2010机械安全带有联锁装置的保护装置设计和选择原则”)提供了相关的指导性原则。这些标准指出:除非机器的危险运行已经停止,否则不得接近危险区域。
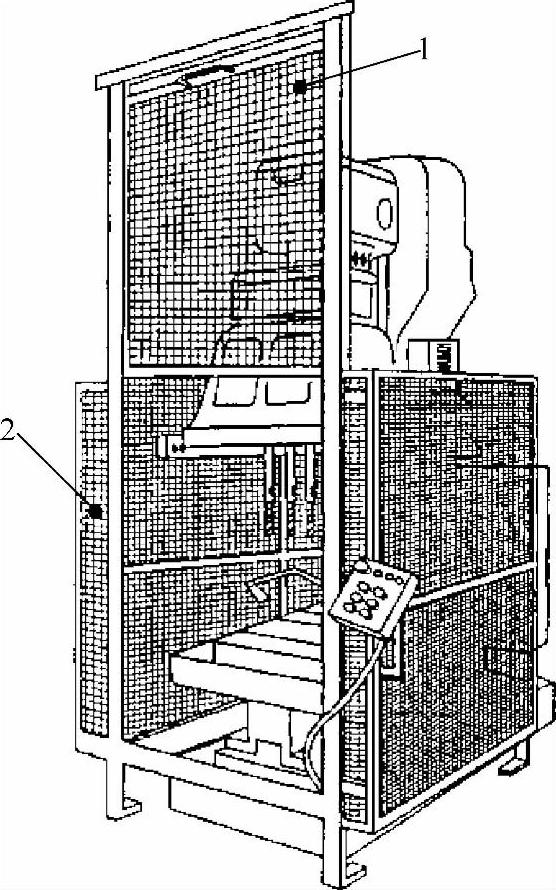
图4-23 防护门应用示例
1—带互锁装置的可移动安全门[必须考虑安全控制回路(如安全开关、安全继电器等)] 2—固定的安全门
2)对闭锁机构的使用源于过程安全。类似情况时有发生:保护装置打开后,危险运动已经被中止,但是却造成了机器或工件的损坏。这种情况下,首先应考虑将机器转至某种受控停止方式,再对其进行操作。
安装的注意事项:
对于带有独立操动头的安全开关,且需要精确定位的巨大且沉重的防护门,需要使用导向装置。
 警告:
警告:
1.伤害的风险。
2.不能使用安全开关作为一个限位开关,因为可能会导致开关的损坏。
1.行程开关
行程开关通常用作防护门上的强制动作开关。防护门打开时,行程开关被激活且可靠地处于断开状态(见第2章第2.2节典型安全控制技术“强制断开结构”的相关内容)。
常见的行程开关根据用途的不同,有多种形式:
1)圆形柱塞式(见图4-24)
①应用场合:门监测、最终停止监测。
②安装注意事项:只能沿着行程方向运动;圆形柱塞和滚轴柱塞都有一个超程,因此执行器的行程超过了其他的执行机构。
2)滚轴柱塞式(见图4-25)
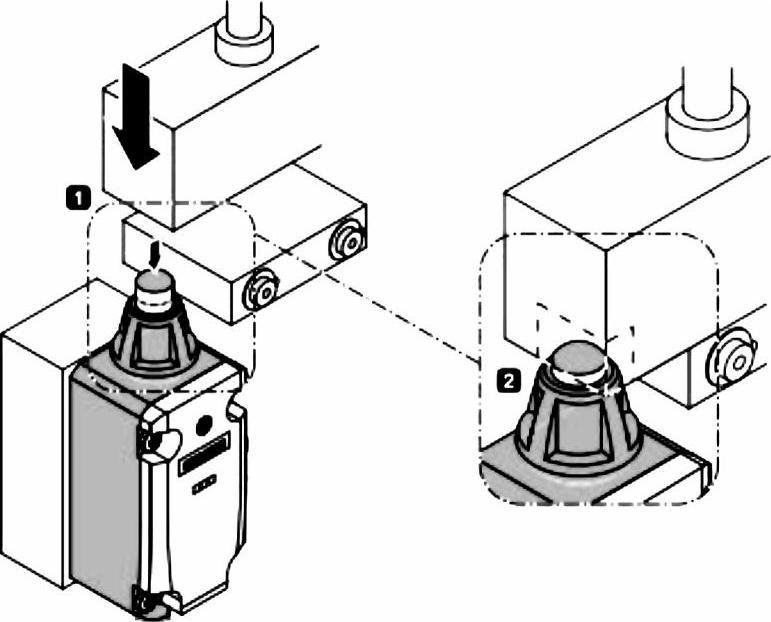
图4-24 圆形柱塞式行程开关应用图示
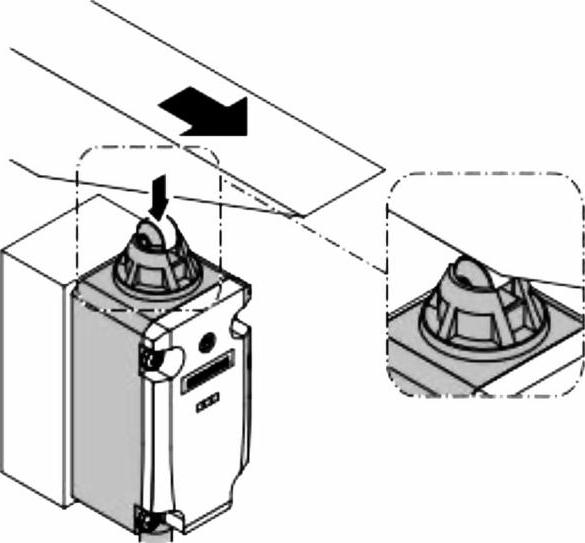
图4-25 滚轴柱塞式行程开关应用图示
②安装注意事项:沿着行程方向运动;沿着垂直于行程方向运动;圆形柱塞和滚轴柱塞都有一个超程,因此执行器的行程超过了其他的执行机构;对于横向运动和相对较长行程距离的情况,应推荐采用滚轴柱塞式行程开关。
3)滚轴摇臂式(见图4-26)
①应用场合:凸轮盘。
②安装注意事项:以没有额外润滑的凸轮、棒或凸轮盘形式,特别适用于由精细研磨钢制作的执行元件;接近角度=轨迹角度,最大30°;每个执行器可以达到90°。
4)斜角滚轴摇臂式(见图4-27)
①应用场合:安装在密闭空间中。
②安装注意事项:以没有额外润滑的凸轮、棒或凸轮盘形式,特别适用于由精细研磨钢制作的执行元件;最高接近速率=2.5m/s;不同的接近角度(a=90°)或轨迹角度(g=45°)。
5)弹簧棒式(见图4-28)
①应用场合:包装输送机系统。
②安装注意事项:可以任意接近方向接近;有棱角物体的接近(例如包裹);不可预知的触动。
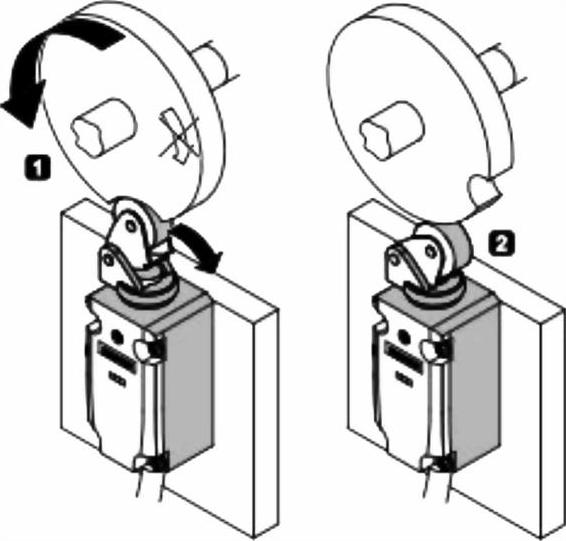
图4-26 滚轴摇臂式行程开关应用图示
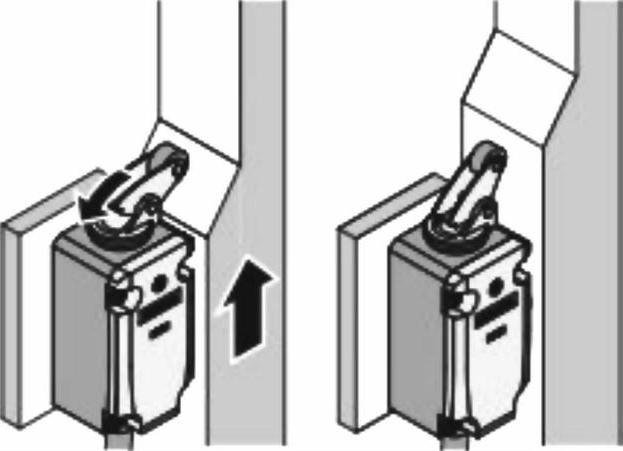
图4-27 斜角滚轴摇臂式行程开关应用图示
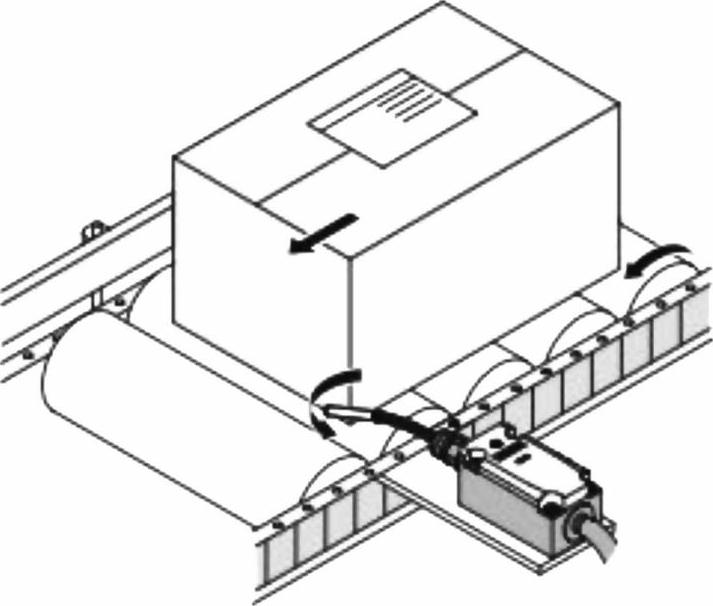
图4-28 弹簧棒式行程开关应用图示
6)双向摇臂式(见图4-29)
①应用场合:传送带、装配线、门监测。
②安装注意事项:最高接近速度(v=1.5m/s);许多可能得路径;对油、粉末、污垢、粗糙的材料不敏感;在双向摇臂的应用中,最大的接近角度等同于最大的轨迹角度;双向摇臂可能有10°的偏移量;从右、从左或从右/左方向操作,可选。
7)可调整高度双向摇臂式(见图4-30)
①应用场合:接近的高度间距是变化的;传送带、装配线;如果由于技术原因,执行元件的方法和角度无法达到。
②安装注意事项:许多可能得路径;对油、粉末、污垢、粗糙的材料不敏感;在双向摇臂的应用中,最大的接近角度等同于最大的轨迹角度;双向摇臂可能有10°的偏移量;从右、从左或从右/左方向操作,可选。
8)可调整高度棒形摇臂式(见图4-31)
①应用场合:接近的高度间距是变化的,例如传送带、装配线;由于技术原因,当行程开关和执行元件间的距离很长时。
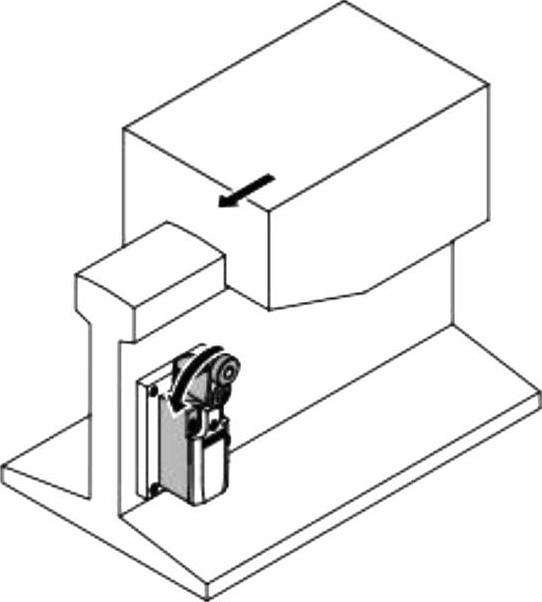
图4-29 双向摇臂式行程开关应用图示
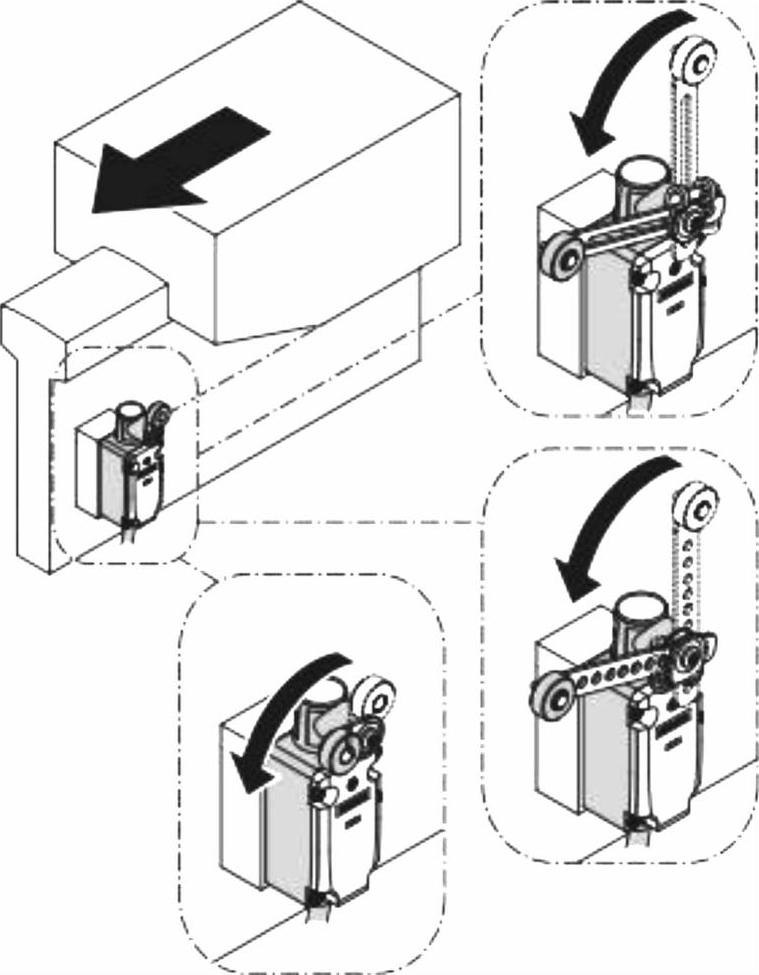
图4-30 可调整高度双向摇臂式行程开关应用图示
②安装注意事项:许多可能的路径;对油、粉末、污垢、粗糙的材料不敏感;如果由于技术原因,执行元件的方法和角度无法达到;无线可调。
9)叉形摇臂式(见图4-32)
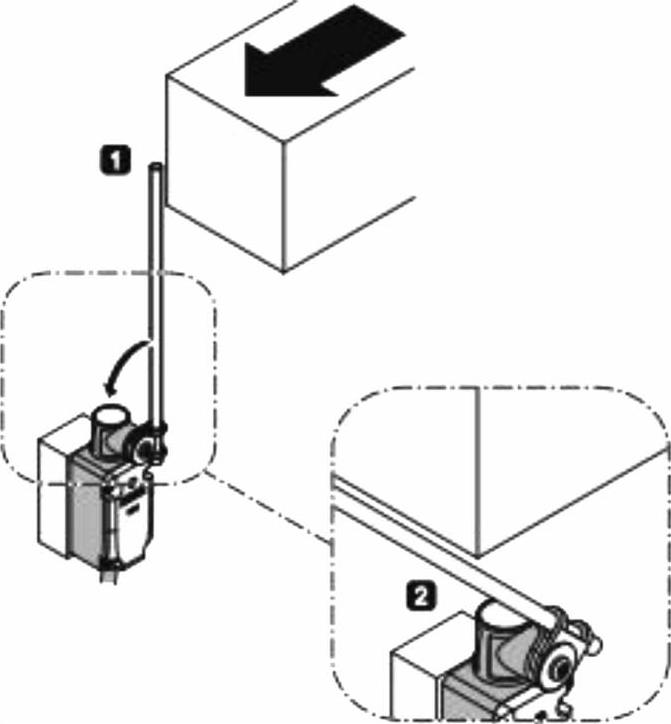
图4-31 可调整高度棒形行程开关应用图示
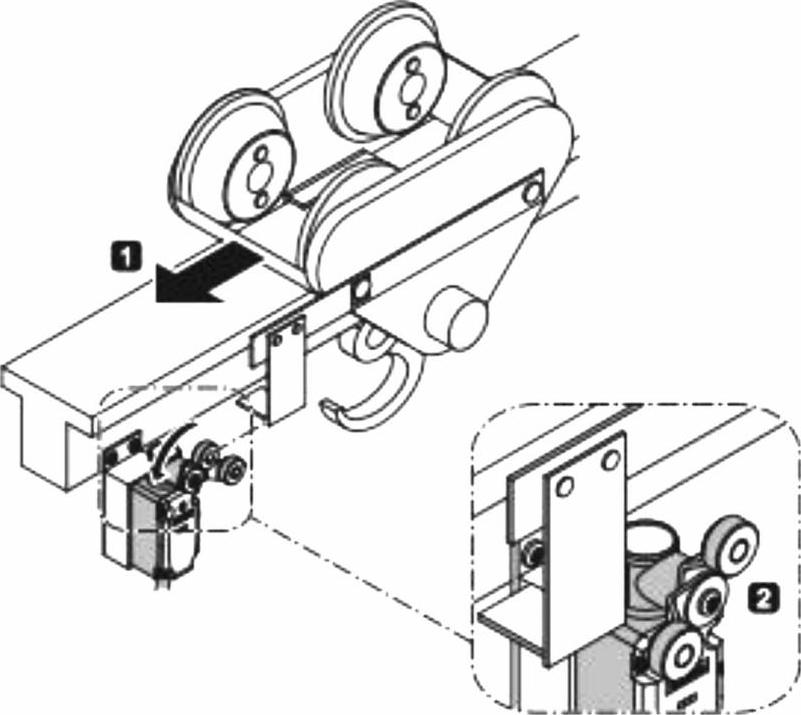
图4-32 叉形摇臂式行程开关应用图示
①应用场合:起重机、起重机行车。
②安装注意事项:针对往复运动;能够在两个方向操作;自锁装置。
 警告:
警告:
1.伤害的风险。
2.叉形杆的动作被锁闭后,必须重启。
注意:执行器不适用于安全回路。
2.机械式安全开关
1)机械式安全开关(带独立执行器/操动头)(见图4-33)
由于安全的原因,带有独立操动头、而没有闭锁机构的机械式安全开关必须被用于门、盖子或防护隔栅的位置监测。
与行程开关不同的是,不能简单地绕过安全开关。仅能采用与所采用的安全开关本体配套的独立执行器/操动头对安全开关进行操作。
a)应用场合:根据应用的需要,确定不同的开关类型。(www.daowen.com)
b)防干扰行程开关:带有独立操动头的防干扰行程开关,用于监测防护门。
c)操动头:
①通常适应来自4个径向(4×90°)动作的应用;
②也可能适应来自4个轴向(4×90°)动作的应用;
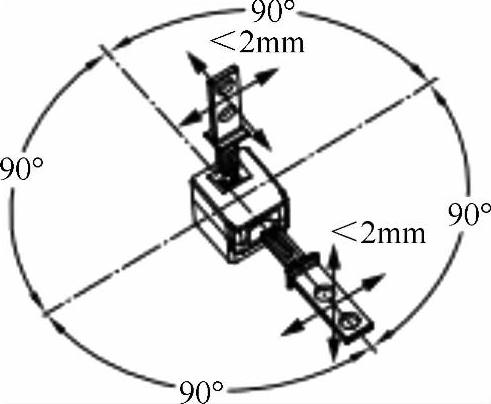
图4-33 操动头的安装角度和安装方向示意图
③操动头是机械编码式的,可以预防通过手或工具对开关的干预。
2)机械安全开关(带闭锁机构)
带有闭锁机构的安全开关是一种特殊的安全工程装置。在危险状态占主导地位时,它可以防止意外地或故意地打开防护门或其他防护盖、防护罩等机械联锁装置(例如机器超程)。采用这类开关,借助独立的执行器,还可以实现独立于闭锁机构的位置检测功能。
闭锁机构通常采用的技术:
①弹簧闭锁(失电闭锁原理),当操动头/操动头准确插入时,安全门自动锁定。通过提供电源,使螺线管解锁,安全门能够被打开。且通常集成如下功能:辅助释放、钥匙操作释放、急停释放、逃逸释放(见图4-34)。

图4-34 弹簧锁定的触头状态示意图
②电磁闭锁(得电闭锁原理),只有当电源供给螺线管时,闭锁机构才被激活,安全门处于锁定状态。如果失电或触发错误,安全门能够被打开(见图4-35)。

图4-35 电磁闭锁的触头状态示意图
3.带有/不带闭锁机构的机械式安全开关的典型应用(见图4-36)
应用示例:
①旋转的大门;
②门、盖子或者防护隔栅的位置监测(不带闭锁机构);
③工作区的防护(带闭锁机构);
④机器要求的停机,此时安全门处于关闭状态(带闭锁机构);
⑤额外的联锁要求,例如在机器人系统的工作区。
1)机械安全开关(铰链开关)
铰链开关用于必须对例如门或盖板等旋转式保护装置的位置进行监测的场合(见图4-37)。
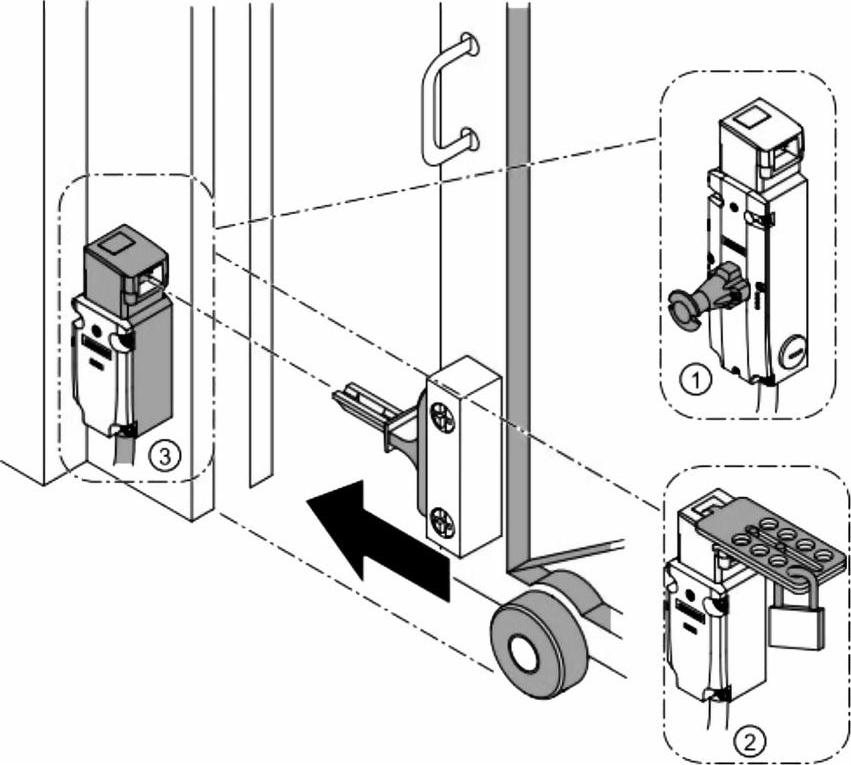
图4-36 机械式安全门开关应用示意图
①—带有闭锁机构(例如用于防护门的安全互锁) ②—带有锁孔(例如用于防护无意中做出的行为) ③—不带闭锁机构(例如用于监测防护门)
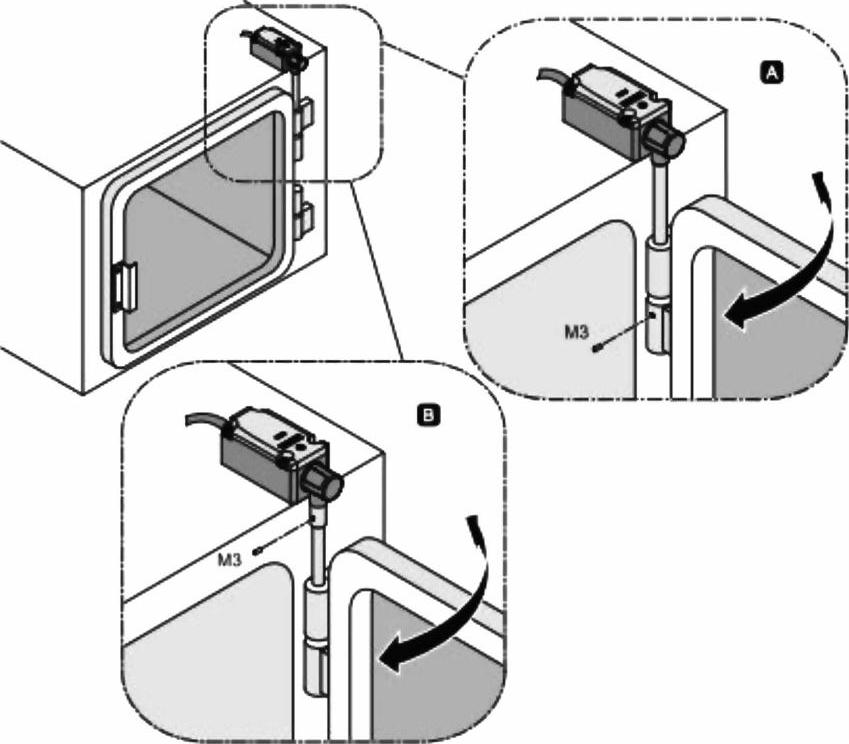
图4-37 机械式铰链开关应用示意图
①应用场合:用于铰链门和翻板的监测,通常在开关和铰链间设计有用于连接的、固定的强制闭锁机构。
②安装注意事项:防干扰;非常低的电流负载≤40mA,可以直接连接到AS-interface网络。
2)非接触式安全开关(电磁控制开关)
电磁控制开关由一个编码线圈和一个开关元件组成。其用途是安装在移动式保护设备上使用。这类开关采用密闭式设计,尤其适用于含有大量污染物、清洁剂或消毒剂的区域。
3)非接触式安全开关(RFID)
应用了无线射频识别(Radio Frequency Identification Devices,RFID)技术的安全开关,由一个非接触式编码安全开关和与之配套使用的RFID执行器组成。
基于RFID技术的非接触式安全开关通常采用DC 24V供电,供电通常只能由安全评估单元来提供。其输出信号是电子式的,就像安全光幕和光栅一样,因此与之配合使用的安全评估单元也必须具备处理该类信号的能力。
这类开关的功能极其丰富,尤其适用于极端环境条件的区域。这些开关的电气工作原理使得它们非常适用于金属加工机械。与机械开关相比,这类开关的转换时间间隔较大,因此其安装误差更好,且具备各种丰富的诊断功能。由于分别对开关和执行器进行编码,因此还具备最大程度的防干预能力。
4.典型应用
防护门由评估单元(如安全继电器)通过带强制断开触头的行程开关进行监测。根据标准EN 60204-1的停止类别0的要求,若防护门处于打开状态,则评估单元通过安全输出断开所连接的执行器。若防护门处于关闭状态,则在完成对行程开关和所连接的接触器的检查之后执行自动复位。对于手动复位的情况下,必须激活”复位”按钮才启动。
注:
1.行程开关必须安装在不会因其他物体接近或经过时,可能损坏该行程开关的位置。因此,行程开关不能用来作为设备停止装置。
2.必须对传感器电缆进行保护;必须只能使用带有强制断开触头的安全传感器(如行程开关、安全开关等)。
3.闭锁机构是一个简单且独立的安全功能,可以与借助行程开关实现的防护门监测的安全功能并列使用。该控制装置所要求的安全完整性可以比针对防护门监测的风险评价结果低一个等级。(原因:可以或多或少地排除两个安全功能同时失效的可能性。例如,防护门监测所要求的安全等级为PL d(类别3)或SIL 2时,则可以采用安全等级PL c(类别1)或SIL 1实现闭锁机构的控制功能。
5.串联连接的条件
如果可以确保不会经常性地同时打开多个防护门,则在安全等级不超过PL d/Caty 3(根据标准ISO 13849-1/EN 954-1)或SIL 2(根据标准IEC 62061)时,可以采用串联方式连接多个行程开关(见图4-38)。对于安全等级PL e/Caty 4(根据标准ISO 13849-1/EN 954-1)或SIL 3(根据标准IEC 62061),不得使用串联连接方式。
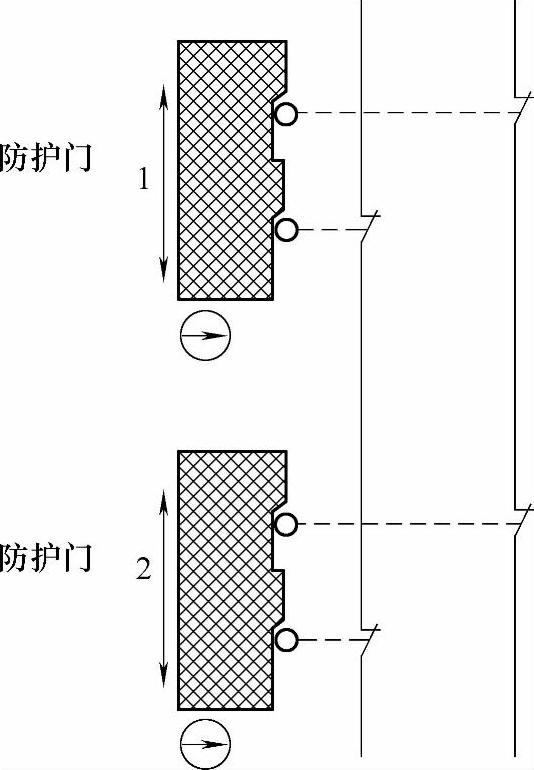
图4-38 行程开关串联应用示意图
6.行程检测单元的可能组合和可以实现的安全等级
本章节中的应用示例只是描述了一小部分能够合理组合使用的检测单元。同时,表4-7中简明地列出了依据位置检测的给定方法可以达到的最高安全等级。
表4-7 采用机械开关实现安全位置监测

(续)

示例1:
采用两个机械式安全开关(带独立执行器/操动头)组合使用的方式,可以实现的最高安全等级为PL e或SIL 3(见表4-8)。
示例2:
采用一个机械式安全开关(如铰链开关)的方式,可以实现最高PL d或SIL 2的安全等级(见表4-8)。
表4-8 安全防护门闭锁机构

注:
1.通常,强制动作意味着防护装置的设计必须确保采用这种类型的行程开关。表4-8中所列出的值也仅在该条件下才允许。
2.在不考虑某些故障的前提下(例如执行器/操动头出现断裂),表4-8中对于仅采用一个铰链开关或者一个带独立执行器的开关可以实现的最高安全等级是SIL 2或PL d,做了合理的描述。在机器制造商为其故障排除功能提供证明材料之前的这一段时间里,部件制造商没有办法对其所采取的措施进行明确的评估。
3.对于采用机电式传感器实现的双通道设计,必须通过评估单元向这些传感器供电才能实现安全等级SIL 3或PL e。只有这样,才能确保诊断功能的实现。
示例3:
采用非接触式安全开关实现安全位置监测,可以实现最高安全等级为PLe或SIL3(见表4-9)。
表4-9 采用非接触式安全开关实现安全位置监测
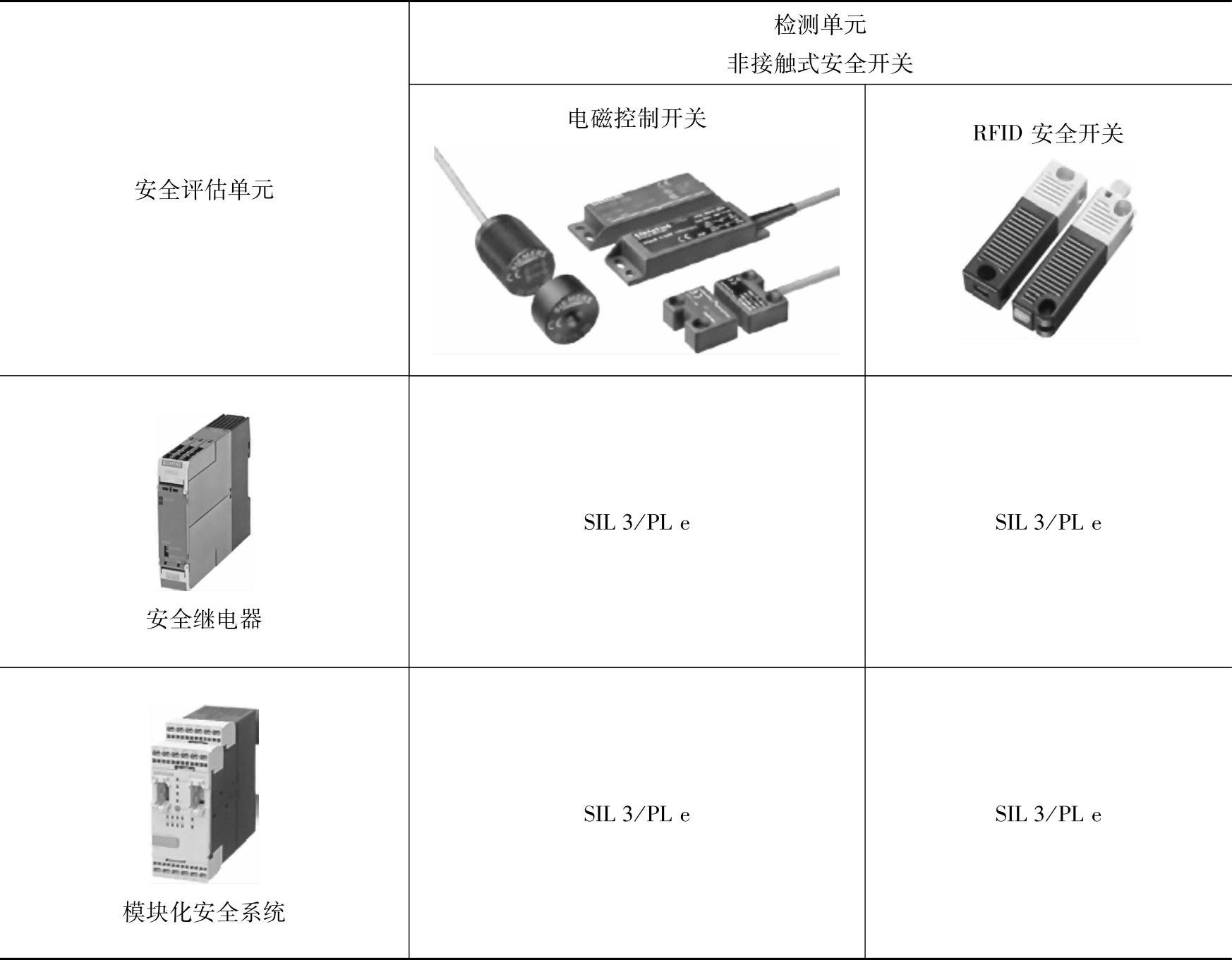
注:可以实现的安全等级还取决于所用安全评估单元的具体型号(尤其是安全评估单元的诊断功能)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





