1.DC/DC变换实现原理
DC/DC变换是LED驱动电源主电路的核心,对于DC/DC驱动电源而言,在其输入端,供电直流电压UIN一般是由应用场所提供的,如太阳能电池板、直流母线、恒压源等,电压等级千差万别;在其输出端,其输出的额定直流电压UONOM(要求恒流输出时,实际上仍要求输出一定范围的直流电压)是由后面的LED光源决定的,LED光源根据应用场合的不同其LED器件数量、连接方式也是千差万别的,导致对驱动电源的输出电压要求也各不相同。因此,UIN、UONOM是设计时的约束条件,驱动电源的主要功能就是实现从UIN到UONOM的DC/DC转换。
实现DC/DC变换的拓扑电路有很多种,其中实现降压变换的Buck变换电路如图2-8所示,电路主要由以占空比D1工作的开关管Q、快速恢复二极管VD、电感L和电容C组成,Buck变换电路的作用是把给定的输入直流电压UIN转换成接近UONOM的实际输出UO,并且输出电压小于输入电压。
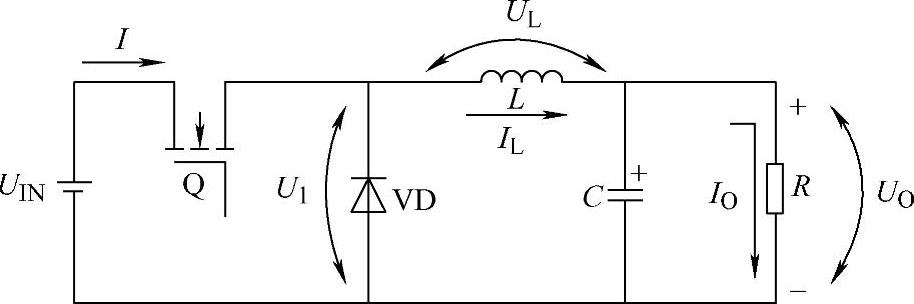
图2-8 Buck变换电路
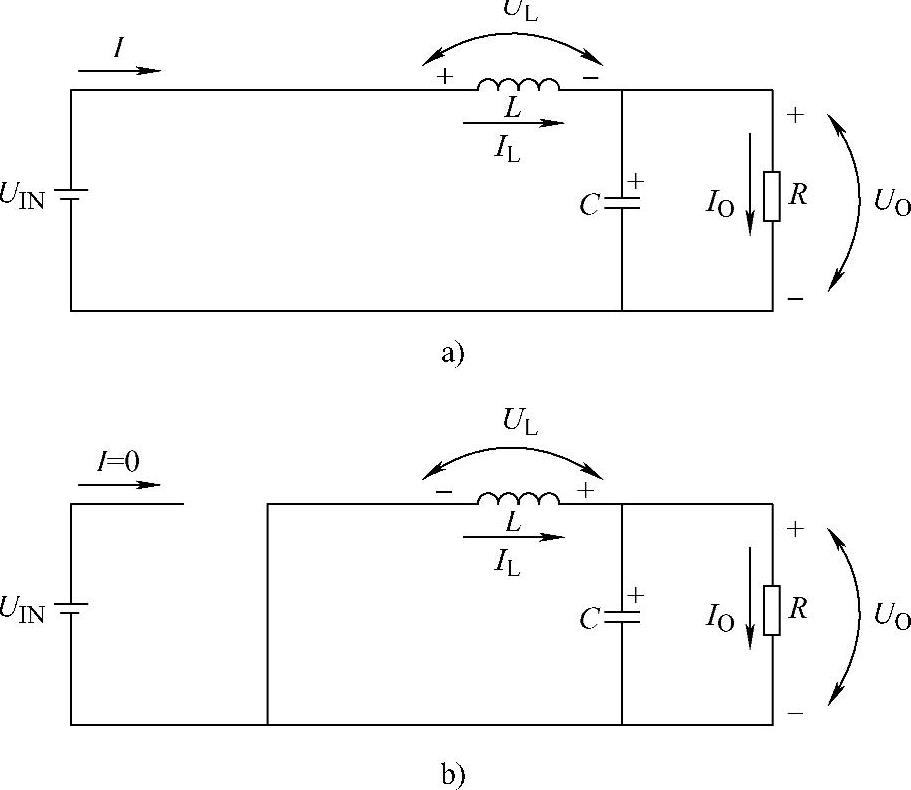
图2-9 Buck变换电路工作过程 a)导通状态 b)关断状态
Buck变换电路的工作过程如图2-9所示,当开关管导通时,电路工作状态如图2-9a所示,电流I与流过电感L的电流IL相等,且电感电流IL的大小处在线性增加的状态;负载R上流过输出电流为IO,其两端的输出电压为UO,其电压极性为上正下负;此时二极管VD的两端为承受反向电压;IL>IO,电容C处在充电的状态。在经过时间D1TS后(D1TS为开关管导通时间,D1为开关管导通时间占空比,TS为周期),开关管断开,其电路工作状态如图2-9b所示。此时电感L为了保持其电感电流IL不变,将改变其两端的电压极性,从而二极管VD将承受正向偏压而导通(二极管导通时间占空比为D2),从而为电感电流IL构成通路,所以称二极管VD为续流二极管。此时负载R两端的电压极性仍然不变(上正下负),IL<IO,电容C处在放电的状态,用来维持IO和UO的稳定[8]。
Buck变换电路的电感电流和电感电压的工作波形如图2-10所示,根据电感电流的工作模式可以把Buck变换电路的工作状态分为两种模式:电感电流连续工作模式和电感电流不连续工作模式。如果开关管的关断时间与二极管的导通时间相等,即D1+D2=1,此时电感电流工作在连续工作模式;当电感较小,负载较大或者是周期TS较大时,将出现电感电流已经下降为零,但是新的周期却还没有开始的情况,此时开关管的关断时间大于二极管的导通时间,即D1+D2<1,这便是电感电流不连续工作模式。
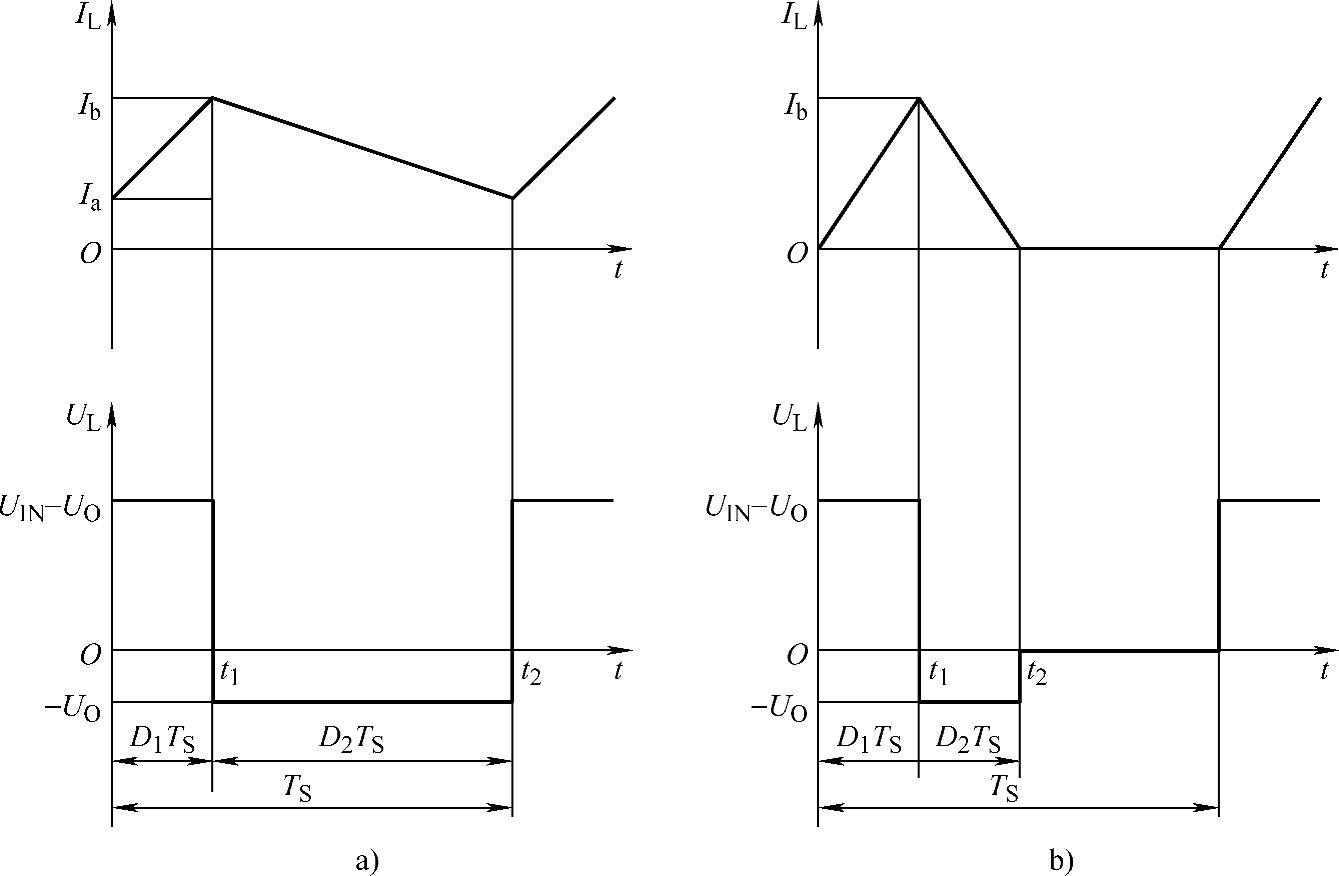
图2-10 Buck变换电路的电感电流和电感电压的工作波形
a)电感电流连续工作模式 b)电感电流不连续工作模式
当开关管导通时,电感电流IL将线性上升,其增量为

当开关管关断后二极管导通时,电感电流IL将线性下降,其增量为

在稳态时,这两个电流增量的绝对值应该相等,即|ΔIL1|=|ΔIL2|,即

整理可得,输出电压UO和输入电压UIN的关系为(https://www.daowen.com)

所以,当电感电流工作在连续工作模式时,D1+D2=1,此时有
UO=D1UIN (2-19)
当电感电流工作在不连续工作模式时,D1+D2<1,此时有

综上所述,无论Buck变换电路工作在电感电流连续工作模式还是不连续工作模式,通过合理设定D1、D2,即可使UO=UONOM,从而将输入电压UIN转换为要求输出的低电压,实现降压变换。
2.恒压/恒流实现原理
通过上述Buck变换电路,虽然可以得到期望的输出电压,但从控制角度看,该系统是一个开环系统,在输入UIN有波动、外界有干扰叠加进来、电路本身存在非线性、负载工作点漂移等情况下,输出电压难以稳定在期望值,因此无法实现恒压输出。
自动控制理论是信息领域的基础理论,自1948年美国数学家维纳提出该理论以来,已经广泛应用于各个领域。其基本思想如图2-11所示,R为被控对象的期望输出,y为实际输出,u为被控对象的控制量,d为扰动,如果只给对象一个固定的u,则对象在各种扰动d影响的下输出y很难稳定在期望值R,因此,将y通过传感器检测环节反馈回控制器输入端,与R比较得到误差e,再通过控制律实时调整控制量u,即可使输出y始终朝着与期望输出R的误差减小的方向发展。通过上述闭环负反馈机制,系统可以抑制环路内任意扰动d的影响,使输出y始终保持与期望值R一致。
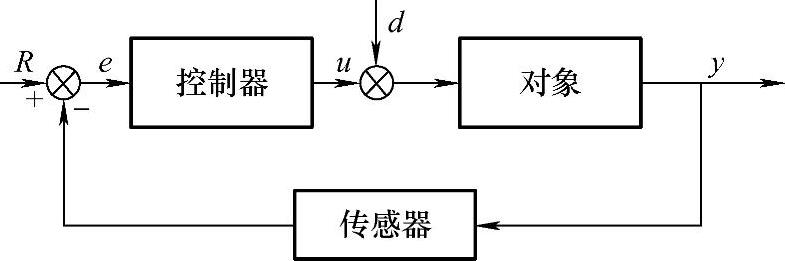
图2-11 反馈控制原理
采用闭环负反馈机制实现恒压/恒流控制的Buck电路原理如图2-12所示,控制器事先设定好期望的输出恒压值UONOM,然后采集输出电压并反馈回控制器,控制器根据反馈值与设定值的偏差实时调整PWM占空比D1、D2,即可在一定的精度内将输出电压UO始终保持在要求的输出值UONOM。
基于闭环负反馈机制实现恒流输出的Buck电路原理与恒压类似,可从恒压原理派生出来。在主电路部分,首先得到与额定输出电流IONOM对应的额定输出电压UONOM,然后即可套用恒压型Buck设计D1、D2初始值;在控制器部分,设定值改为期望的输出恒流值IONOM,输出采样改为通过采样电阻采集输出电流,如图2-12中虚线部分,即可在一定的精度内将输出电流IO始终保持在要求的输出值IONOM。
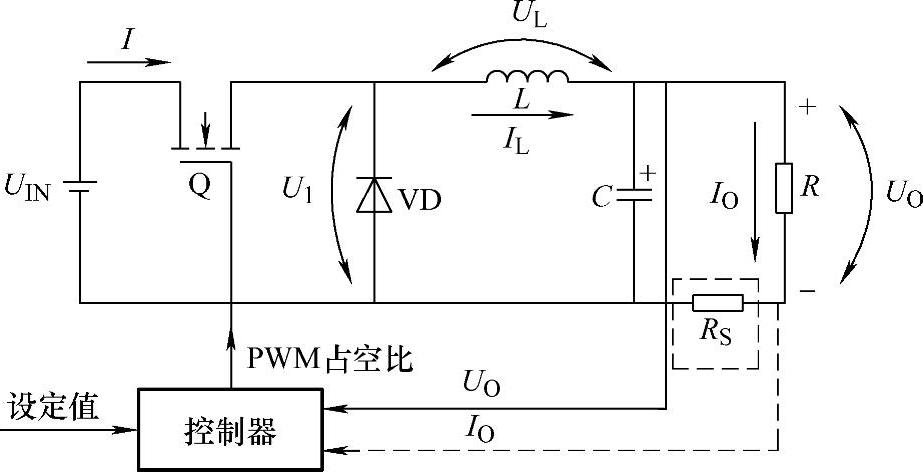
图2-12 基于闭环负反馈机制实现恒压/恒流控制的Buck电路原理
统一的DC/DC恒压/恒流实现原理如图2-13所示,DC/DC变换模块可以根据不同的变换要求选择合适的主电路拓扑结构,如降压型(Buck)电路,升压型(Boost)电路,降压-升压型(Buck-Boost)电路,以及电荷泵、Cuk、SEPIC、隔离反激、隔离正激电路等。控制器可以通过简单的比较放大电路模块实现,也可以用专门的LED驱动控制芯片(控制功能复杂的还可采用单片机等CPU系统实现);目前大多采用LED驱动控制芯片,其中集成了设定、反馈、控制、PWM驱动、保护等多种功能,控制方式灵活多样,有的还将功率开关管集成在一起,使电路简单可靠;控制器输出可以是主电路开关管的PWM占空比,也可以是线性电路的控制电压/电流。通过设定值和输出信号采样的配套,可以实现恒压控制、恒流控制或恒压恒流双闭环控制。
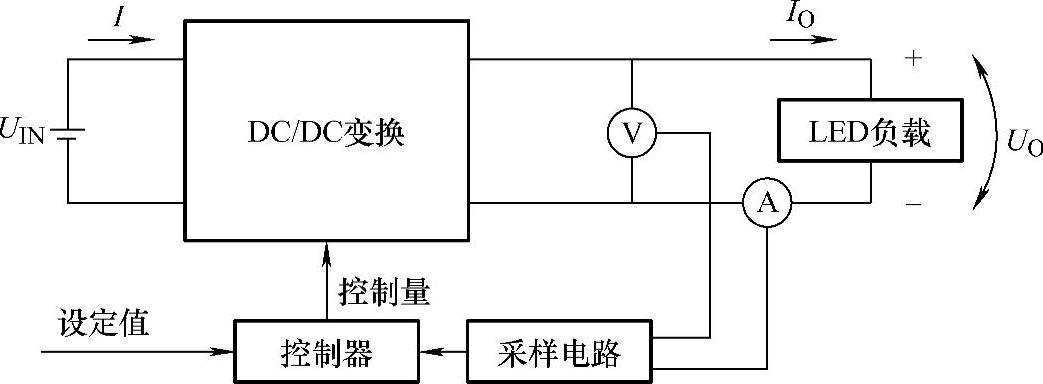
图2-13 统一的DC/DC恒压/恒流实现原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







