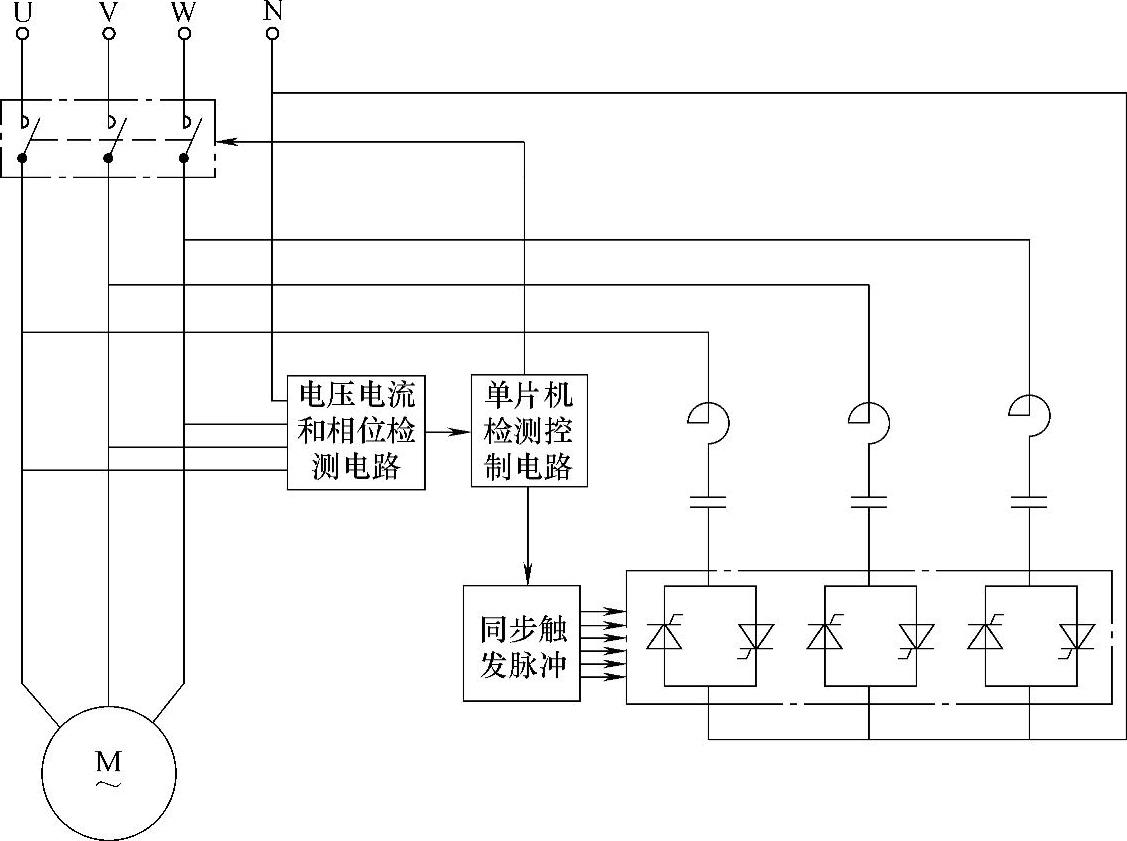
1.晶闸管相控动态补偿电路原理
晶闸管相控动态补偿电路原理如图7-14所示。图中每组反并联晶闸管分别与电容器串联,再接成星形,构成动态补偿主电路。在补偿容性无功功率时,为抑制冲击电流,需在主电路中串入电抗器。晶闸管相控动态补偿电路还包括:同步相位检测电路;单片机检测控制电路;同步脉冲触发电路。下面分别介绍各部分电路的工作原理。
(1)电压电流检测电路 图7-14中的检测电路包括两部分:一部分是同步相位检测电路,如图7-15所示;另一部分是电压电流检测电路。相位检测电路分别检测U、V、W三个线电压的过零点,图中只画出U相。V相和W相与之相同。将检测到的三个相电压过零点信号,经过光耦隔离送给单片机。电压电流检测电路可采用电压互感器和电流互感器检测,将采集的电压和电流信号经过处理送至单片机。
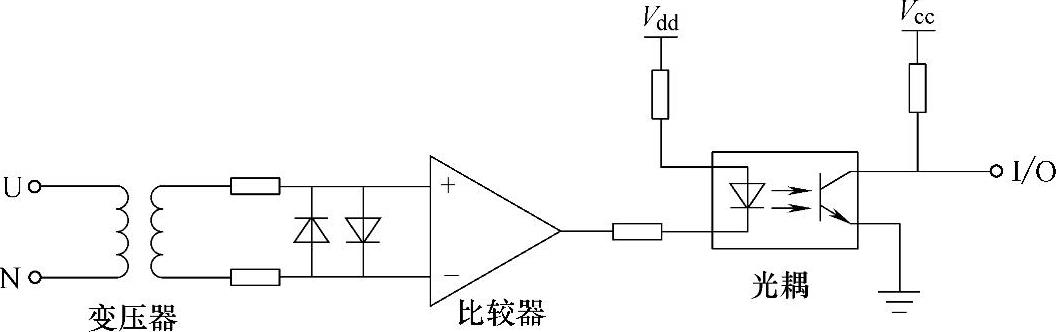
图7-15 同步相位检测电路原理图
(2)单片机检测控制电路 为了计算相位方便,可采用具有交流信号A/D采集功能的单片机。如果是单向A/D采集的单片机,还需有电压与电流相位比较电路。单片机根据电压、电流以及检测到相电压和相电流之间的相位差,计算出电动机在Δt时间内每一相的无功功率ΔQ。即
ΔQ=UpIpsinφ (7-29)
式中 Up和Ip——电动机的相电压和相电流。
(3)同步脉冲触发电路 同步脉冲触发电路如图7-16所示。图中的同步脉冲触发电路主要包括两部分:一部分是单片机发出的同步脉冲信号电路;另一部分是脉冲变压器。脉冲信号经放大送给脉冲变压器输入端。脉冲信号经脉冲变压器增强,形成强触发信号输出到晶闸管的门极,从而可靠地触发晶闸管。晶闸管同步脉冲触发电路共有六路,每两路驱动一个晶闸管。
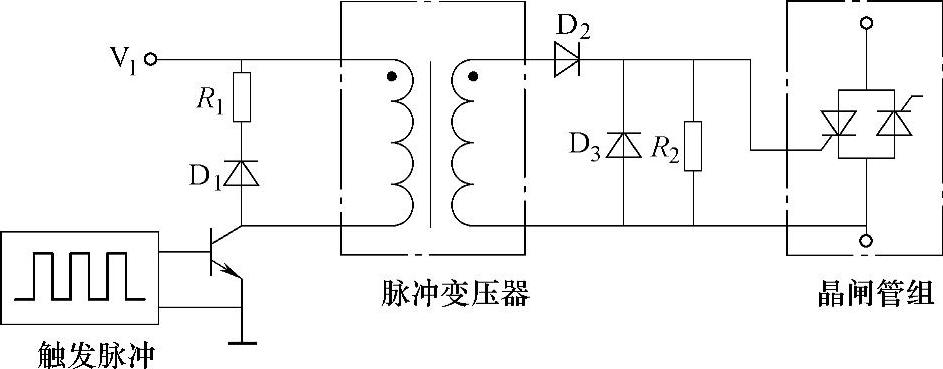
图7-16 晶闸管同步脉冲触发电路
2.晶闸管相控无功调节原理
晶闸管相控无功调节方法:设每个采集时间为Δt,即步长。在第一个Δt检测每一相的无功功率为ΔQ,在下一个Δt时间内补偿无功功率为ΔQ。晶闸管相控无功调节是调节电容上电压,电容电压是与触发角相关的斩波电压,即非正弦电压。此时电容无功功率为
Qc=ωCU2α (7-30)
式中,Uα是触发角为α时对应的非正弦电压有效值。(www.daowen.com)
取Δt时间内补偿无功功率ΔQ等于斩波电压在电容上产生的无功功率ΔQc。即
ΔQ=ωCU2α (7-31)
由电压有效值定义,可得

将式(7-32)代入式(7-31)可以推得触发角α与无功功率的关系为

C——电容值;
Um——斩波电压的幅值。
这是一个关于触发角α的超越方程,直接求得α角的表达式很困难。可以先求出各触发角所对应的无功功率,比如分别取α=0°,2.5°,5°,LL,180°,其对应的无功功率为ΔQ=ΔQ1,ΔQ2,LL,ΔQ72,然后根据测得无功功率在对应的两点之间进行插值求得触发角α。
无功调节步长Δt,可以根据负载变化的周期来确定。负载变化快,步长Δt可以小一些;负载变化较慢,步长Δt可以大一些。
由图7-14可以看出,这种动态补偿是滞后跟踪控制,是开环控制。在一个步长的时间内(比如Δt=100ms)检测电动机的无功功率是多少,在下一个Δt开始时就补偿多少,同时检测Δt内无功功率。就是根据瞬时无功功率计算出触发角α,再计算出六路触发脉冲的相位,由单片机定时发出六路触发脉冲波,触发六个晶闸管。
在控制过程中有三个问题值得注意。
(1)开始时,导通角β由小逐渐增大。在上电前电容器无电荷,晶闸管在第一个触发脉冲的瞬间,尽管有限流电抗器,也会产生较大的冲击电流。因此上电后导通角β由小逐渐增大,可以有效地抑制冲击电流。
(2)合理确定小周期从上面的分析可以看出,步长越小,跟踪补偿效果会越好。但晶闸管相位控制周期不能小于20ms。在一两个工频周期内,瞬时无功功率的稳定性也比较差。因此通常选择几个或十几个工频周期作为一个调节步长比较合适。
(3)如果在一个大周期内,负载波动很大,大周期时间又比较短,比如十几秒或几十秒,这样无功功率变化将很复杂(参见后面的图7-22)。这种情况下可以先进行无功功率曲线的辨识,再根据曲线适当地调整步长和补偿量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




