所谓的变极调速就是通过改变定子绕组的组合(连接)方式改变电动机的磁极对数,从而改变电动机的转速。从表5-1中可以看出,变极调速最大的缺点是调速级差大,不能实现平滑调速。但有些情况下,负载只需要2~3个固定转速,而且这2~3个固定转速与电动机变极转速接近,或者经过减速机后与电动机变极转速相对应。那么就可以利用电动机变极调速的方法来实现转速配合,同样达到电动机拖动系统节能的目的,而且节能效果更好。
三相异步电动机转速方程

可知改变定子绕组的极对数p,就改变了同步旋转磁场的转速n0。当电源频率为50Hz时,磁极对数p=1、2、3、……,即可得到n0=3000、1500、1000r/min等不同的同步转速。由于p只能是正整数,所以变极调速是有级调速,而且级差比较大。
由电动机工作原理可知,电源频率变化一周,相当空间磁场旋转一对N-S极,对于一对极的笼型电动机,三相绕组在空间360°形成一对N-S磁极,所以频率变化一周(电角度360°),磁场移动空间角度也正好是360°(机械角度360°);如果三相绕组在空间360°形成二对N-S磁极,则电源变化一周,旋转磁场空间移动一对N-S极,只占空间180°机械角度,相当转速慢一半,因此旋转磁场的同步转速n0与极对数p成反比。在异步电动机变极调速时,当定转子极数相等时,才能产生平均电磁转矩。对于绕线式异步电动机,在改变定子绕组接法来改变极数时,必须同时改变转子绕组的接法,以保持定转子极数相等,这使变极接线及控制显得非常复杂。而笼型异步电动机当定子极数变化时,其转子极数能自动跟随定子极数。所以,变极调速只用于笼型三相异步电动机。变极调速关键是改变绕组的连接方式,下面介绍变极绕组的工作原理。
假定图5-12所示电动机的定子每相绕组都由两个完全对称的‘半相绕组’所组成。以A相为例,它由‘半相绕组’a1x1和‘半相绕组’a2x2所组成。当这两个‘半相绕组’头尾相串联时(称为顺串),如图5-12a中的所示,其形成的是一个2p=4极的磁场,如图5-12b所示。如果将这两个‘半相绕组’头尾相并联(称为反并),如图5-12c所示,所形成的则是一个2p=2极的磁场,如图5-12d所示。从图5-12b和5-12d可知,只要将两个‘半相绕组’中的任何一个‘半相绕组’的电流反向,就可以将极对数增加一倍(两个‘半相绕组’顺串时)或减少一半(两个‘半相绕组’反并时)。这就是单绕组倍极的变极原理,如2/4极,4/8极等。除了上述最简单且最常用的倍极变极方法之外,也可以用改变绕组接法达到非倍极的变极目的,如4/6极等。常用的倍极变极方案有两种,一种是Y→双Y变极。另一种是△→双Y变极。这两种变极方案中电动机的三相绕组引出端子少,接线简单,控制方便。(www.daowen.com)
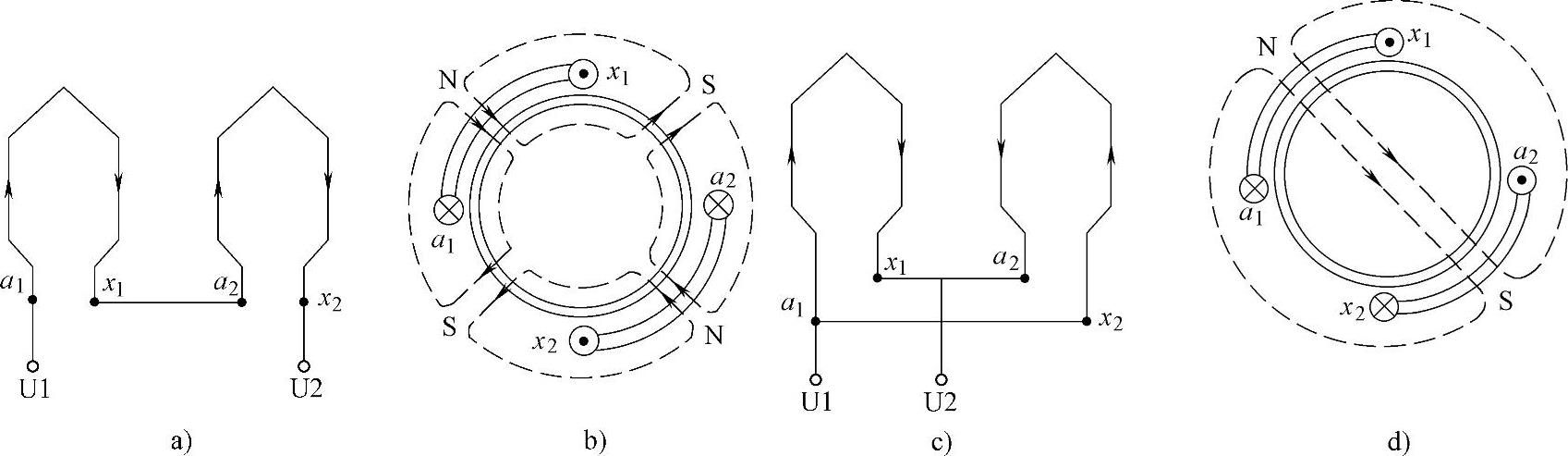
图5-12 变极绕组接线原理图
需注意:在图5-12中,在改变‘半相绕组’的接法的过程中,旋转磁场在改变磁极对数后,旋转方向也随之改变,为保持转向不变,必须在变极的同时改变电源相序的接法。
相对于变频调速,电动机变极调速的优点:可靠性较高,没有较复杂的调速设备,维护方便;投资少;对电网不会产生谐波污染;调速设备本身无附加损耗。变频器本身有约5%~10%的损耗。相对于变频调速,电动机变极调速的最大缺点是有级调速。同机座的变极电动机的成本比普通电动机略高一些,旧电动机改造时要满足定、转子的槽数配合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






