【摘要】:图4-7 物体在空间的六个自由度图4-8 工件的六个定位点为增强工件定位的稳定性,一般以面积较大的一面作为主要定位基准,如图中的工件底面。在工件左侧面设置的两个支承点4、5两点的连线不能与主要定位基准面垂直,而跨度应尽量地大;在工件后侧的支承点6也应设置在侧面的中心,才能保证定位的稳定性。
由理论力学的概念可知:在空间处于自由状态的刚体(工件),在空间直角坐标系中有六个自由度,如图4-7所示:即沿着三个相互垂直的坐标轴移动,分别用 、
、 、
、 表示。这样,工件在这六个自由度方向上的位置就没有被确定。
表示。这样,工件在这六个自由度方向上的位置就没有被确定。
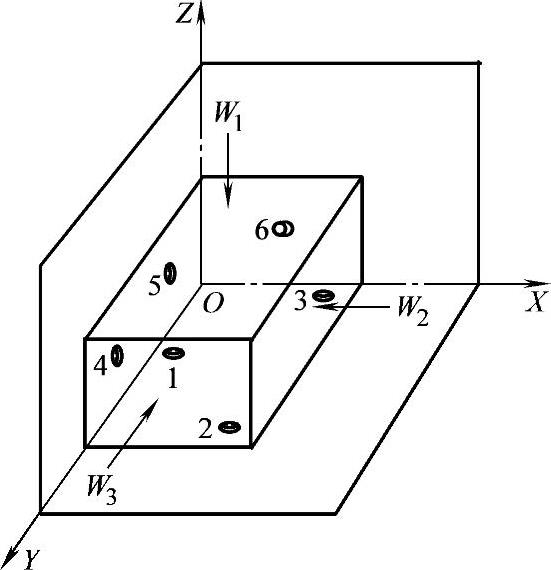
因此,工件要正确定位,必须消除这六个自由度。限制工件自由度的典型方法,就是在空间合理地分布六个等高的支承点。如图4-8所示,在空间坐标系的OXY平面上设置三个支承点1、2、3,使工件的底面紧贴在这三个支承点上,限制了 、
、 、
、 三个自由度;在OYZ平面上设置两个支承点4、5,使工件左侧面紧贴在这两个支承点上,限制了
三个自由度;在OYZ平面上设置两个支承点4、5,使工件左侧面紧贴在这两个支承点上,限制了 、
、 两个自由度;在OXZ平面上设置一个支承点6,使工件后面紧贴在这一点上,限制了Y一个自由度。这种用合理分布的六个支承点限制工件六个自由度的方法,称为六点定位原理。
两个自由度;在OXZ平面上设置一个支承点6,使工件后面紧贴在这一点上,限制了Y一个自由度。这种用合理分布的六个支承点限制工件六个自由度的方法,称为六点定位原理。

图4-7 物体在空间的六个自由度
 (www.daowen.com)
(www.daowen.com)
图4-8 工件的六个定位点
为增强工件定位的稳定性,一般以面积较大的一面作为主要定位基准,如图中的工件底面。在底面设置了三个支承点,必须呈三角形分布,它们联接起来所形成的三角形面积越大,支承力越稳定,就越容易保证各表面间的位置精度。同时,主要定位基准通常要承受较大的外力,如夹紧力、切削力等。所以在实践中,往往以平整的基平面代替这三个支承点。
在工件左侧面设置的两个支承点4、5两点的连线不能与主要定位基准面垂直,而跨度应尽量地大;在工件后侧的支承点6也应设置在侧面的中心,才能保证定位的稳定性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关师傅教你学车工的文章





