离心泵的振动测量一般是通过在泵的壳体外部和轴承座处布置速度或加速度传感器的方法来实现。根据机械行业标准JB/T 8097—1999《泵的振动测量与评价方法》[160]中的规定,离心泵的振动测量主要测量点是轴承座处和靠近轴承座处,底座和管线法兰处作为辅助测量点。该标准中,以振动烈度作为判断振动的尺度,把10~1000Hz范围内振动速度的均方根值作为振动烈度的大小,单位为mm/s。振动烈度分为A、B、C、D四级,其中D级为不合格。把不同转速和不同中心高度的泵分成四类,把实测的振动烈度与标准相比较,进而判别泵的振动是否合格。该标准的优点是测量方案实施简单,数据处理快速方便,可以较直观地评价泵的振动大小。但是,该标准中的方法也有较大缺陷,即不能区分各振动源的贡献情况,无法获得振动源的相关信息。众所周知,离心泵是一个带有旋转和静止部件的复杂系统,激励振动的原因较多,如非定常流动、临界转速、转子不对中、加工误差等。依据该标准测量得到的是各种原因诱导产生的整体振动,无法单独提取和分析水力激振。因此,该标准较适用于振动的工程评价。
针对以上问题,本书提出能够对离心泵转子水力激振进行测量的方法,该方法可以在静止坐标系下对旋转部件的振动进行准确的非接触测量,并且可以剔除由加工精度以及其他机械原因产生的振动干扰,最终获得水力激励下的振动结果。
离心泵转子瞬态水力激振测量方案如图3-31所示,主要包括以下几个步骤:
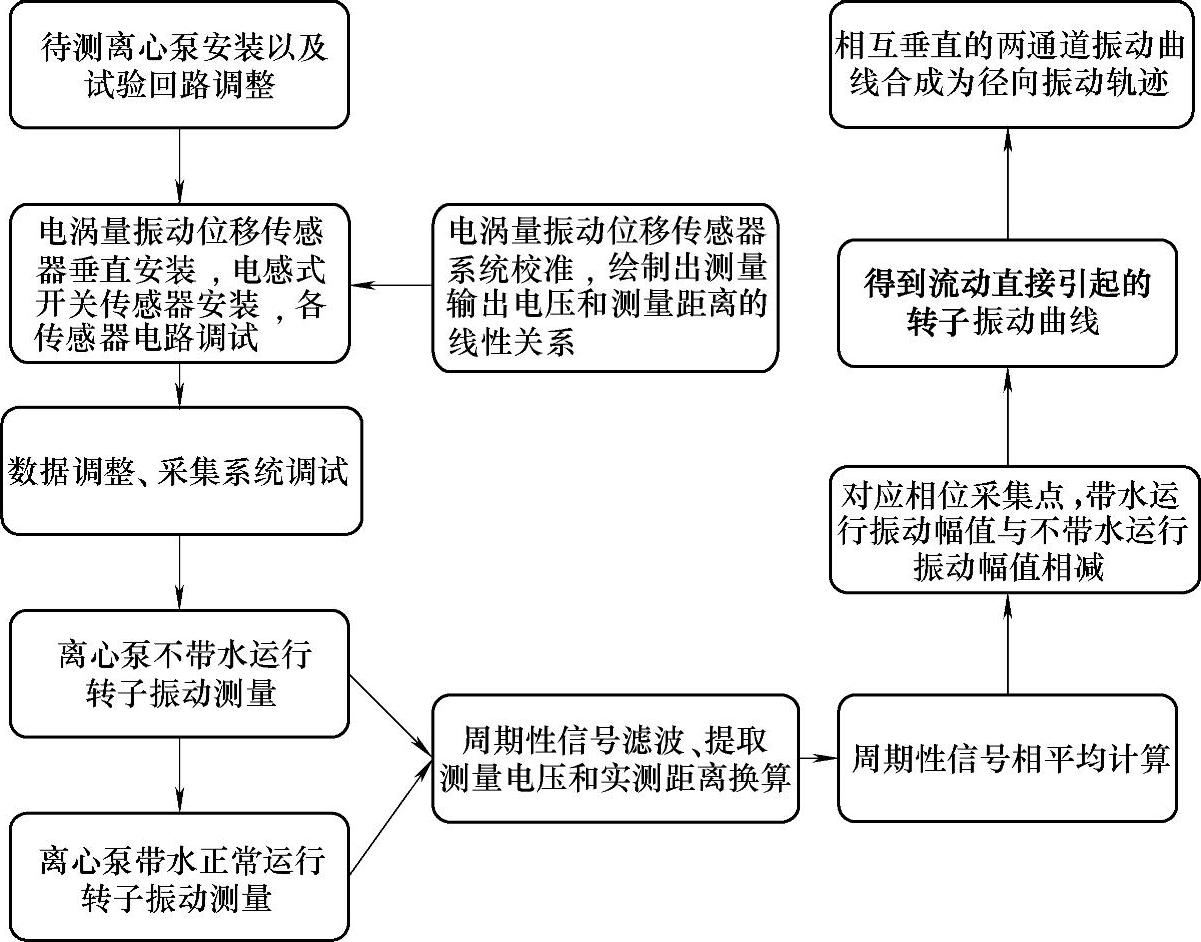
图3-31 离心泵转子瞬态水力激振测量方案
1)安装待测离心泵和调整试验回路,使其在各种要求的工况下能够正常运行。
2)选用与待测离心泵叶轮材料相同的圆盘,利用校准装置对两个电涡量振动位移传感器分别进行静态测量校准,绘制出两个传感器回路输出电压与测量距离的线性关系。
3)在蜗壳上靠近叶轮口环位置两个相互垂直的方向上安装趋近式电涡量振动位移传感器,同时,在后泵腔处安装电感式开关传感器,并对传感器的电路进行调试。通过两个相互垂直的电涡量振动位移传感器实现对叶轮径向平面上振动位移的测量,利用电感式开关传感器实现对转子系统转动相位的测量。
4)对数据采集系统进行调试,对采集的数据进行调整。
5)在待测离心泵无水运行状态下,对叶轮振动轨迹进行测量,简称“干”测量。该振动轨迹主要是由机械结构原因引起的,如叶轮口环处圆周加工的不精确、泵的轴承间隙、转子系统质量的不对称等。该测量的目的是记录仅由这些不可避免的机械原因引起的振动,以便在后续测量中剔除这些干扰量,获得由水力激励诱导的振动轨迹。
6)在待测离心泵带水正常运行状态下对转子振动进行测量,简称“湿”测量。
7)对上述测量的转子振动周期信号进行滤波,并根据校准曲线实现测量系统输出电压值和实际测量距离值的换算。
8)为了消除振动信号测量过程中可能产生的随机干扰和其他测量不确定性,将多个周期的测量信号进行相平均计算,得到在各个相位上平均的振动结果。
9)将各相位上带水运行振动幅值与不带水运行振动幅值相减,得到仅由水力激励诱导的振动信号幅值。(https://www.daowen.com)
10)将两个垂直方向上分别测得的振动曲线转化为平面上的振动轨迹,最终绘制出转子径向水力激振位移曲线。
本试验采用的测量方案的优点是:
1)由于采用了电涡量振动位移传感器对转子系统的振动量进行测量,从而实现了对转子振动的无接触测量,使得振动系统能够方便地安装在静止的离心泵壳体上,无需使测量装置随转子旋转,在保证振动测量精度的基础上,大大降低了测量的难度。
2)测量过程中对振动信号进行滤波能够有效滤除试验信号采集的噪声干扰,获得所需频率的水力激振信号;对振动信号进行相平均计算能够有效地获得周期性信号,消除数据采集中的振动信号奇异值。
3)通过对离心泵无水运行状态下振动信号的测量,记录了离心泵机械振动信号。这种由机械结构原因引起的振动是无法完全避免的,在离心泵带水正常运行时仍然存在。因此,将机械振动信号进行有效剔除,可获得真正的水力激振信号,为研究离心泵水力激振现象提供试验支撑。
为了利用数学方法准确表述试验中获得的转子瞬态水力激振位移,在测量的转子径向振动平面定义了静止坐标系xOy,如图3-32所示。y方向电涡量振动位移传感器位于坐标系y轴正半轴,x方向传感器位于坐标系x轴负半轴。根据电感式开关传感器的安装位置,定义图3-32中叶轮的位置为叶轮旋转周期的起始位置,即φ=0°。分别定义x和y方向上叶轮在非运行条件下与电涡量探头的初始距离为Sx,0和Sy,0。实际上,对于不同的叶轮转动位置,由于口环表面加工误差等因素的影响,该初始距离不同,是叶轮转动角度位置φ的函数,可写成Sx,0(φ)和Sy,0(φ)。同理,可定义不同叶轮转动角度下“湿”测量得到的距离值为Sx,wet(φ)和Sy,wet(φ);“干”测量条件下得到的距离为Sx,dry(φ)和Sy,dry(φ)。根据传感器布置位置与xOy坐标系的相互关系,可得不同叶轮角度下,x和y方向由流体激励作用的叶轮振动位移计算公式


式中,ΔSx,actual(φ)、ΔSy,actual(φ)分别表示x和y方向上瞬态水力激励振动位移,其正负直接表示了振动位移相对定义的xOy坐标系的方向性。
从这两式可以看出,各方向上水力激振位移只与“干”测量结果和“湿”测量结果有关,与叶轮和电涡量探头间的初始距离无关。这在一定程度上提高了测量的精度,因为初始距离Sx,0(φ)和Sy,0(φ)在实际试验过程中较难准确获得。
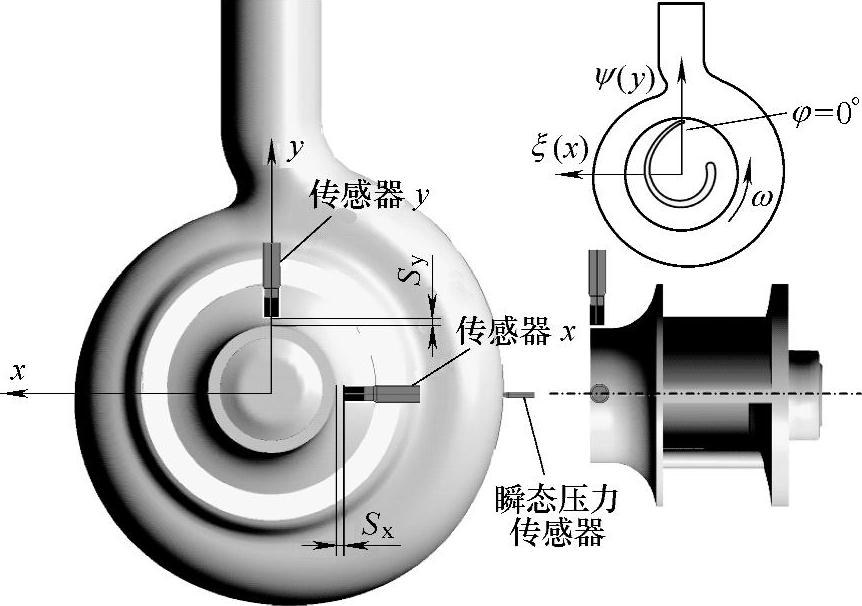
图3-32 振动测量静止坐标系及测量距离量定义
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





