交流电动机通常采用三相桥式逆变器将直流电源转换为所需的交流电源,如图15-10所示。一种重要的逆变方法就是脉宽调制(PWM)。脉宽调制是利用半导体开关器件的导通与关断把直流电压变成电压脉冲序列,并通过控制脉冲宽度以达到调节控制电压、电流、频率和谐波的目的。脉冲宽度调制信号是一个周期固定宽度变化的脉冲序列,即每一个周期有一个脉冲,这个固定周期称为PWM(载波)周期,其倒数称为PWM频率。PWM脉冲的宽度由另一个期望值序列确定或调制,该期望值序列就是调制信号。
在电动机控制系统中,PWM信号用于控制功率开关器件的导通与关断时间,以向电动机提供期望的电压、电流。相电流形状、频率以及向电动机绕组提供能量的大小就决定了电动机的转速和转矩。这时施加于电动机的命令电压或电流就是调制信号。通常调制信号的频率(50~100Hz)要比PWM载波频率(10~20kHz)低很多。
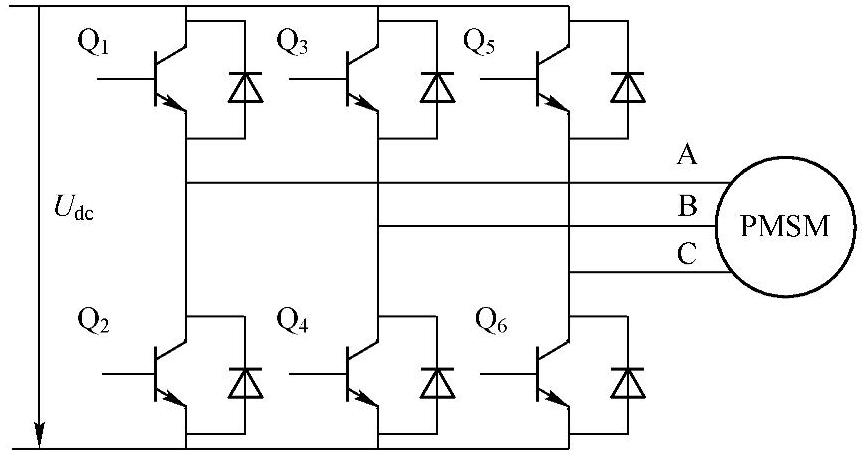
图15-10 三相逆变器主回路
要产生PWM信号,首先要有一个合适的定时器用于PWM周期重复计数,还要用一个比较寄存器来保持调制信号值。比较寄存器的数值不断地与定时器值相比较。当数值匹配时,在相应的PWM输出引脚产生一个由高到低或由低到高的转变。当下次匹配或定时器计数到时,要产生一个由低到高或由高到低的转变。这样产生一个输出脉冲,其导通(或断开)时间与比较寄存器值成正比。
DSP控制器的一个事件管理器有三个比较单元,每一个比较单元可用于非对称或对称PWM波形产生,三个比较单元可联合可用于空间矢量PWM波形输出。采用定时器、死区单元及输出逻辑电路,每一个比较单元可用于产生一对PWM输出信号。与三个比较单元相应的6个输出引脚可方便地用于控制三相交流电动机、无刷直流电动机与步进电动机等电机。
PWM控制技术从电压波形正弦,到电流波形正弦,再进一步发展到磁通正弦即空间电压矢量法(Space Vector PWM,SVPWM)。SVPWM是从电动机角度出发,着眼于如何使电动机获得幅值恒定的圆形磁场即正弦磁通。它以三相正弦波电压供电时交流电动机的理想磁通轨迹为基准,用逆变器不同的开关模式产生的实际磁通去逼近基准磁通圆,从而达到较高的控制性能,即可以获得更小的电流谐波含量与更大的电源电压利用率。空间电压矢量PWM是将α-β坐标下的电压参考矢量转换为功率器件导通、断开的时间,以产生准正弦电流。下面介绍SVPWM方法。
(1)三相对中点的电压
三相PMSM通以三相对称正弦电压,产生正弦电流,如图15-11所示。设三相电源电压为
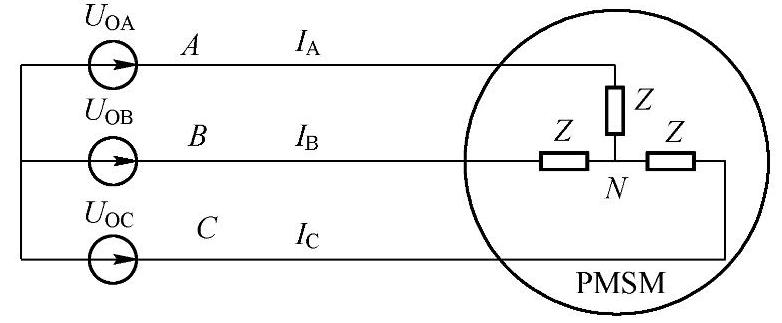
图15-11 三相对称系统
UOA=Umcosωt
UOB=Umcos(ωt-120°)
UOC=Umcos(ωt+120°)
为计算每相对中点的电压即UAN、UBN、UCN,列出如下方程:
UON=UOA+ZIA
UON=UOB+ZIB
UON=UOC+ZIC
这样 3∗UON=UOA+UOB+UOC+Z(IA+IB+IC)
注意到 IA+IB+IC=0
则 UON=(UOA+UOB+UOC)/3 (15-12)
可求得相对于中点N的电压
UAN=UON-UOA=(-2UOA+UOB+UOC)/3
进一步可得
UAN=(2UAO-UBO-UCO)/3
UBN=(2UBO-UAO-UCO)/3
UCN=(2UCO-UAO-UBO)/3 (15-13)(https://www.daowen.com)
(2)静态功率桥应用
在静态功率桥情况下,不采用正弦电压源,而是采用六个功率开关器件作为通断开关联接于通过整流得到的直流母线电压,目的是在绕组中产生正弦电流而形成旋转磁场。由于绕组的电感特性,通过调制功率开关的负荷时间,以产生准正弦电流。
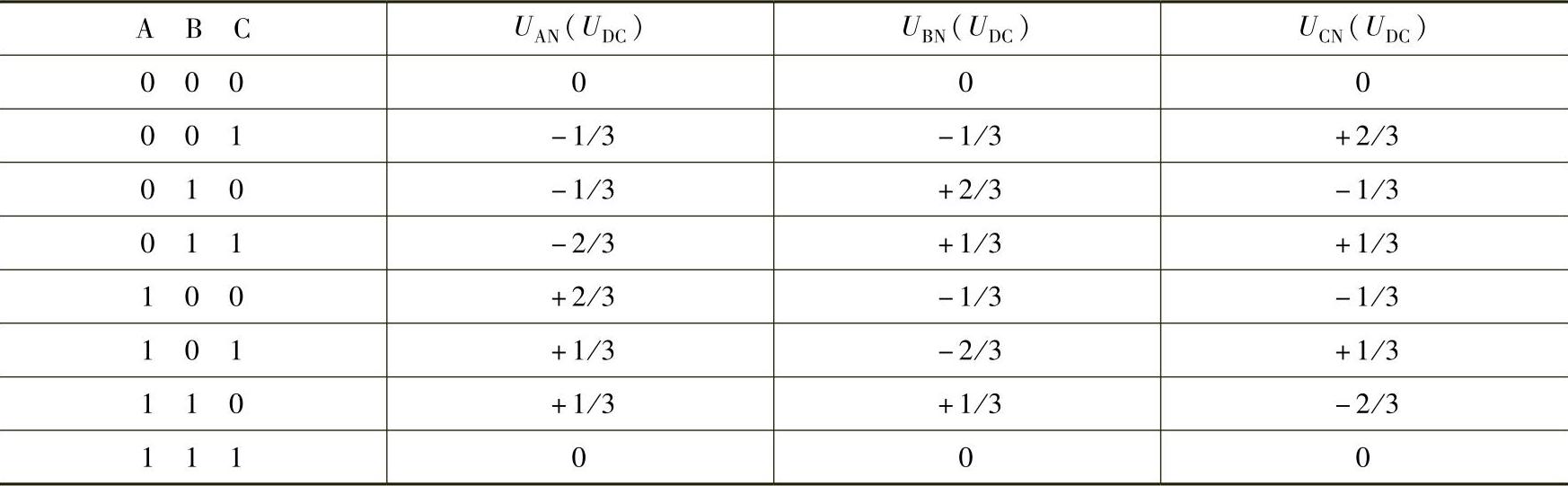
如图15-12所示,6个功率开关器件(Q1~Q6)由6个PWM信号控制。这种结构开关有8种状态组合。可以分析出各种状态下整流桥输出电压(以虚拟的整流直流电压中点O为参考点)见表15-2。表中“1”代表该相上桥臂功率器件导通,“0”代表下桥臂导通。由上述方程(15-13)可以求出A、B、C每相对绕组中点的电压见表15-3。
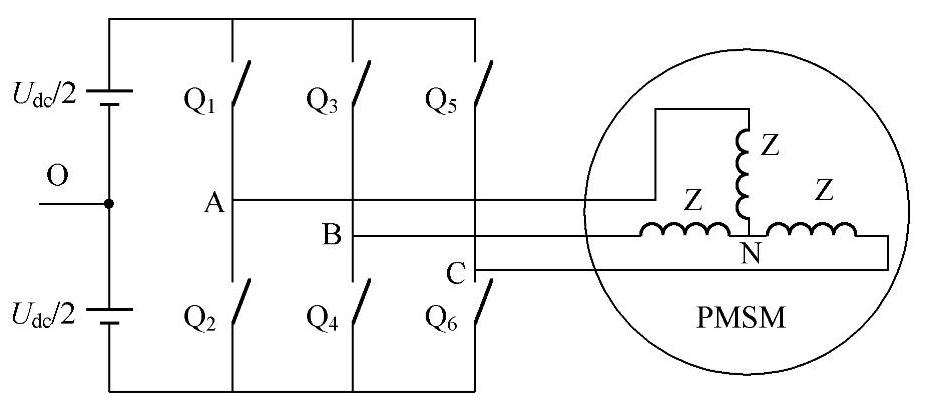
图15-12 功率桥
表15-2 功率桥输出电压(UAO,UBO,UCO)
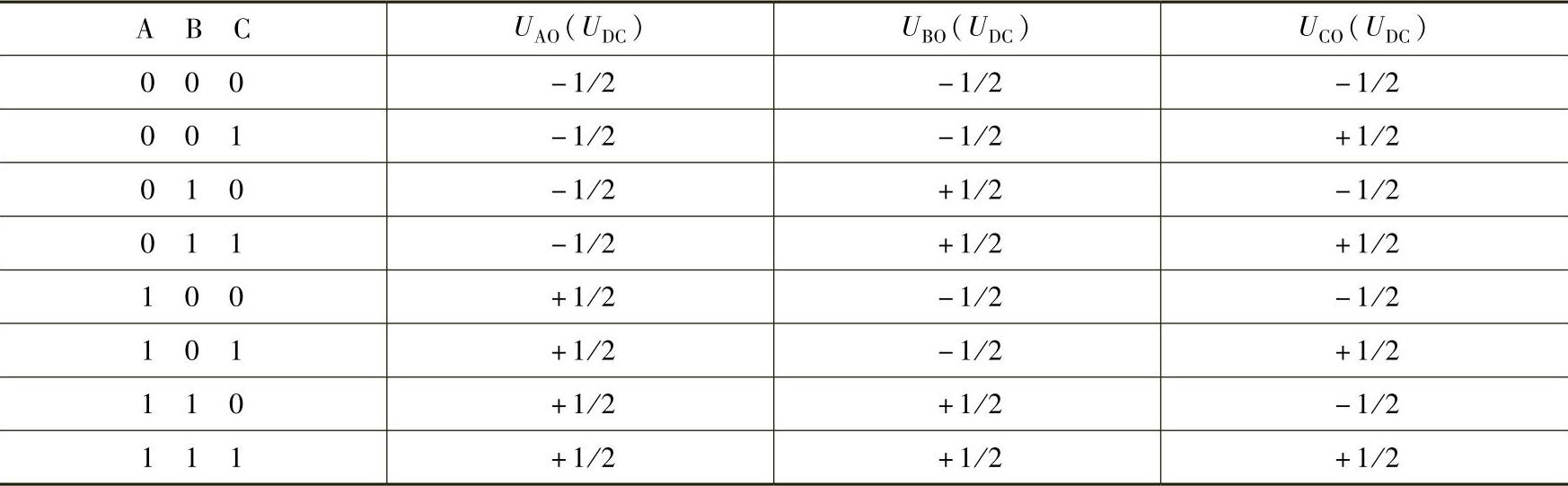
表15-3 功率桥输出电压(UAN,UBN,UCN)
(3)α-β坐标下的定子电压
矢量控制算法的控制变量采用d-p旋转坐标,通过d-p坐标反变换(即Park反变换),可由α-β坐标表示定子参考电压矢量。同样三相电压(UAN,UBN,UCN)也变换到α-β坐标。三相电压变换到α-β坐标的关系式为

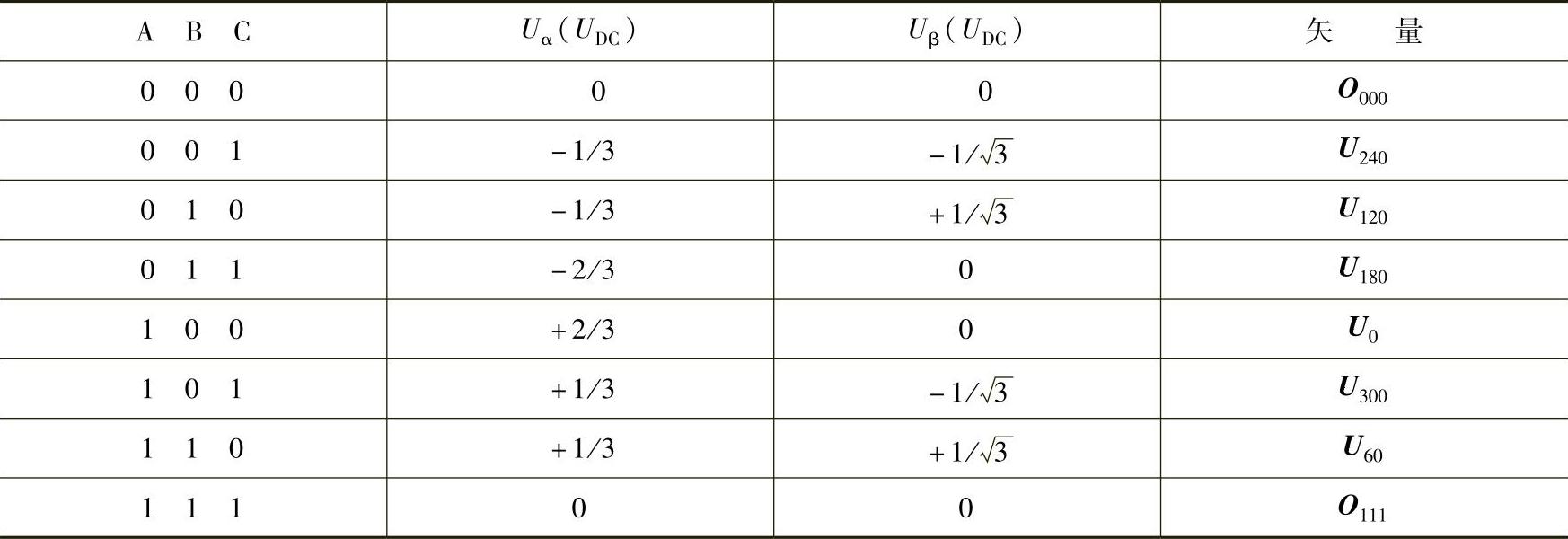
由于有8种开关组合,Uα、Uβ也有8种情况,见表15-4,它们形成的8个参考电压矢量如图15-13所示。
表15-4 定子电压矢量(Uα,Uβ)
(4)定子参考电压矢量分解变换
如图15-12所示,逆变器主回路的6个功率开关器件Q1~Q6可以形成8个状态量,分别对应8个空间矢量,以Q1、Q3和Q5的开关状态来表示:000~111,1表示导通,0表示截止,而Q2、Q4、Q6的状态与对应的Q1、Q3和Q5正好相反。其中6种状态(001~110)为非零矢量,两种状态(000,111)为零矢量。6种非零矢量输出电压,并在电动机中形成6个工作磁链矢量,以六种不同工作电压矢量所形成的实际磁链,来追踪三相对称正弦波供电时定子上的理想磁链圆,即可得到PWM调制时的等效基准磁链圆。当输出电压矢量Uout旋转到某扇区时,由组成该扇区的两个相邻非零矢量Ux,Ux+60分别作用T1,T2时间,时间分解如图15-13所示。为补偿Uout的旋转频率,插入零矢量O111或O000,时间为T0,有
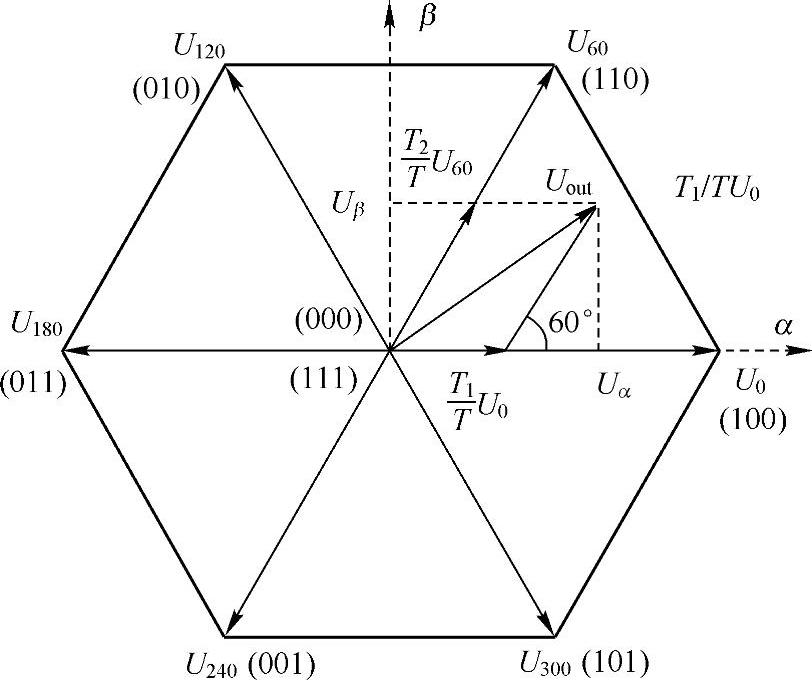
图15-13 空间电压矢量调制(SVPWM)

T为PWM周期。
为确定T1,T2的数值可进行如下分解变换(以U0、U60扇区组成的扇区为例),如图15-13所示,有
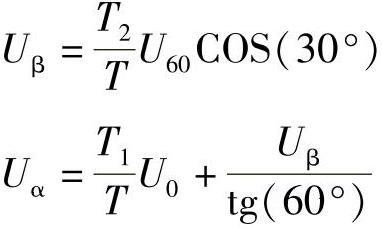
结合表15-5中U0、U60的数值,可求出相邻矢量的作用时间分别为

图15-14给出了U0、U60组成扇区(称为扇区1)的SVPWM开关顺序。扇区改变后,除了要按不同扇区计算非零矢量的作用时间外,还要将A、B、C三相电压输出的顺序相应改变。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




