三相对称绕组通以对称电流,形成一个按同步转速旋转的合成电枢磁动势即旋转磁场。设ia,ib,ic为三相定子绕组电流的瞬时值,随时间变化。采用单矢量多时轴的方法,取定子绕组A、B、C各相空间轴线为各自的时间轴。定子电流空间综合矢量定义为

综合矢量是一个在空间旋转的矢量,如图15-6所示,各相电流为综合空间矢量在各自相轴上的投影。这种综合矢量的分析方法也适合于电压、磁链等,而且不要求各相物理量必须按正弦变化。
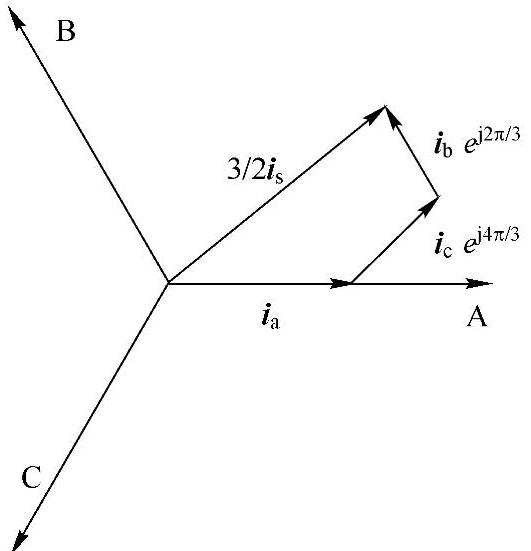
图15-6 定子电流空间综合矢量
旋转空间综合矢量is是三相电流的空间矢量和,也同样可以由常用的α-β两相静止坐标系统产生,如图15-7所示。三相A、B、C到两相α-β坐标系统变换(也称为Clarke变换)的关系式为

对于三相永磁同步电动机对称接法,通常无相线,三相电流之和为零,即零序电流为零,i0=0。三个变量只有两个是独立的,即
ia+ib+ic=0
这时坐标变换的公式可以得以简化,三相到两相静止坐标变换即α-β变换的关系式为
iα=ia

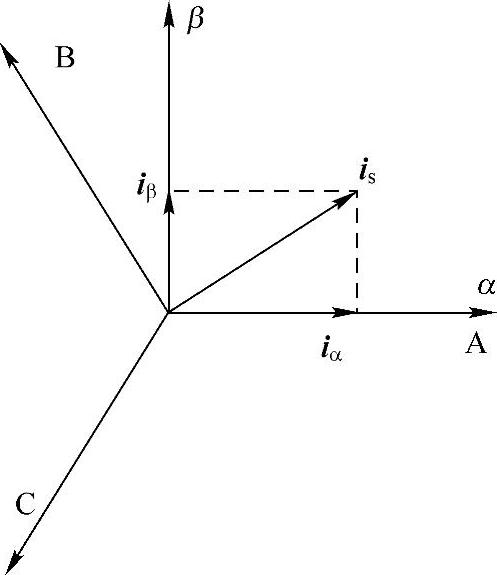
图15-7 A、B、C到α-β的坐标变换
α-β变换后,电磁转矩仍然是转子磁通位置的函数,电磁方程的求解仍很困难,为此进行d-q坐标变换。d-q坐标是建立在转子上的旋转坐标,取转子磁通ψf的方向为d轴正方向,如图15-8所示。
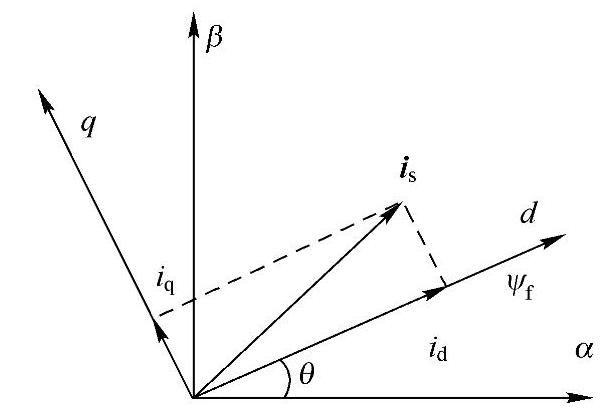
图15—8 α-β到d-q的变换
综合矢量is。可分解为沿d-p轴的两个分量id,iq。两相静止坐标变换到转子旋转坐标变换即d-p变换(也称为Park变换)的表达式为(https://www.daowen.com)

θ为转子d轴领先定子a相(α轴)的电气角度。d-q坐标变换后,定子电压方程可以大为简化,相应的d-q坐标电压方程即Park方程为

Ra为定子相电阻,p=d/dt为微分算子。ω=pθ=dθ/dt为电气角速度。ψd,ψq为d-q轴磁链,

ψf,为转子永磁体磁链,为一常数。Ld、Lq为d-p轴电感。电磁转矩方程为

pn为电动机极对数。
而机械运动方程为
Te=TL+JpΩ+BΩ (15-8)
TL为机械负载转矩,Ω=ω/pn为机械角速度,J为转动惯量,B为运动阻尼系数。
交轴电流iq为转矩电流分量,对电磁转矩的产生起主要作用。通常励磁电流分量id对电磁转矩的产生贡献不大,且存在使永磁体去磁的可能,故控制id=0,即采用磁场定向控制(FOC)方法,使定子磁场与转子磁场始终保持垂直。这时电磁转矩方程和d轴电压方程分别为
Te=3/2pnψfiq (15-9)
ud=-pnΩLqiq (15-10)
电磁转矩与交轴电流iq成正比,即
Te=Ktiq (15-11)
Kt=3/2pnψf为比例常数。这类似于传统它激直流电动机,能够实现电磁转矩的线性化控制。因此,采用id=0的矢量控制,可以得到优良的转速控制特性。对于高于额定转速的应用场合,可使id<0,即采用弱磁调速,进行恒功率控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





