增量式光电编码盘的结构如图9-1所示,它的一个轨道刻缝产生交替变化明暗光线。码盘的参数为每转产生的明暗光线对数即每转刻线数。另一轨道单个刻缝每转产生一个脉冲信号即索引信号QEPI,该信号可以表示绝对位置。索引信号也被称为零位、原点位置或零参考信号。
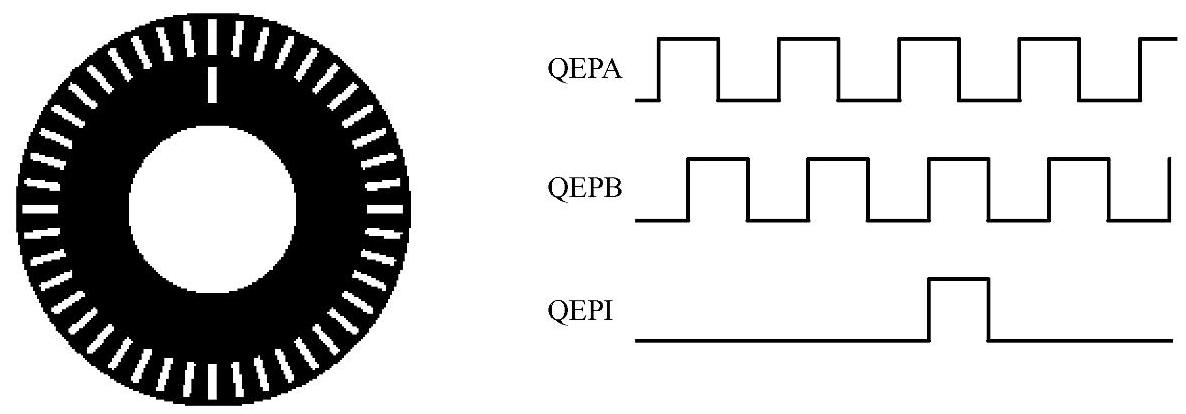
图9-1 光电编码盘
为获得方向信息,利用两个相差1/4节距的光电元件读取两路相位相差90°的脉冲信号,这两路信号被称为正交信号QEPA、QEPB。一般定义编码器的正向(顺时针)为QEPA通道领先QEPB通道变高,反之为负向,如图9-2所示。图中N为每转的线数。
通常电动机旋转一转光电编码器的轮盘也旋转一圈,或二者有一齿轮变比。因此,来自QEPA和QEPB输出数字信号的频率随电动机的转速按比例变化。例如,将一个2000线的编码器直接耦合到以5000转/分(rpm)运行的电动机,可以得到166.6kHz的频率。这样通过测量QEPA或QEPB信号的频率可以确定电动机的转速。不同厂家的正交编码器有两种不同形式的索引信号(门控或非门控),如图9-3所示。一种非标准的索引信号是非门控的。在非门控结构中,索引信号边沿不需要与A或B信号一致。门控索引信号与相应的4个正交边沿的一个对齐。索引信号脉宽可以等于0.25、0.5或一个周期的正交信号。
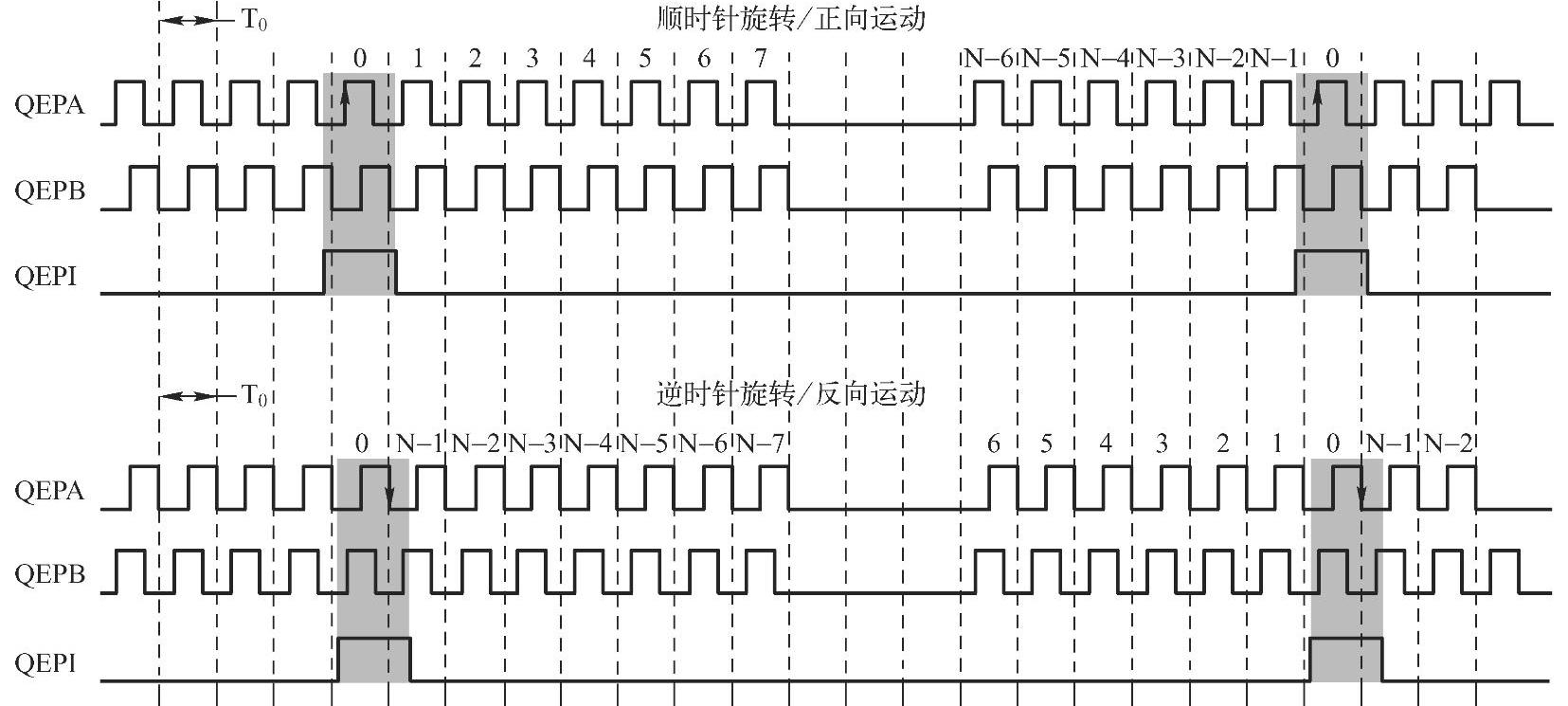
图9-2 QEP编码器正向/反向运动输出信号
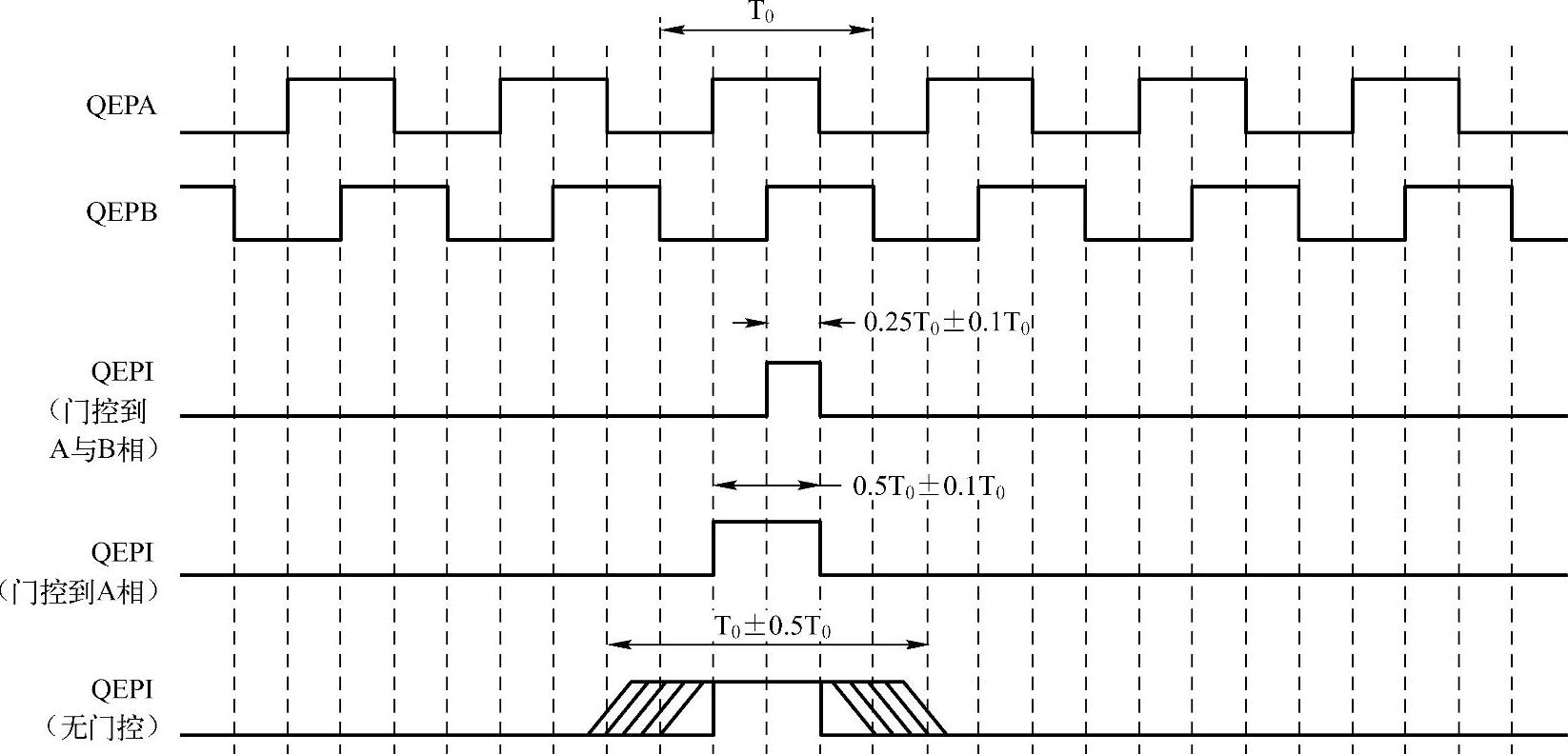
图9-3 索引脉冲信号
轴端编码器典型的应用有机器人、计算机的鼠标等。在鼠标中,鼠标球使得一对轴(左/右轴和上/下轴)旋转,这些轴连接到光电编码器,通过编码器可以知道鼠标移动的快慢与方向。
在电动机控制中一个常规的问题是通过数字位置传感器估计转速,可以选用两种一阶方法即高速和低速估算公式。
高速估算公式为(https://www.daowen.com)

式中,v(k)为k时刻的速度;x(k)为k时刻的位置;x(k-1)为k-1时刻的位置;T为特定单位时间或速度计算率的倒数;ΔX为单位时间的位置移动增量。
该公式是速度估算的常规方法,它需要一个时间基准来为速度计算提供单位时间事件。单位时间以速度计算率的倒数为基础。
每一个单位时间事件读取一次编码器计数值(位置)。将当前读数减去上一次读数可以得到[x(k)-x(k-1)]值。那么速度估计值可以通过乘以常数1/T得到。
根据该公式的估算具有一个直接与位置传感器的分辨率和单位时间周期T相关的固有的精度限制。例如,考虑一个每转500线具有400Hz速度计算率的正交编码器。在用于位置计算时,正交编码器具有4倍频精度,本例为2000计数值/转。因此可以测得的最小旋转运动为0.0005转,相当于400Hz采样时得到一个12rpm速度准确度。这样的准确度在中速或高速时是令人满意的,例如1200rpm有1%的误差。但在低速情况下是不合适的。事实上在12rpm速度以下,速度估算值会错误地估计为0。
低速估算公式为
式中,v(k)为k时刻的速度;t(k)为时刻k;t(k-1)为时刻k-1;X为特定单位位置;ΔT为单位位置移动的时间增量。
在低速情况下,该公式可以提供一个更精确的方法。它需要一个位置传感器例如正交编码器输出一个脉冲序列。对于一个给定的传感器准确度,脉冲的宽度由电动机速度定义。该公式可以用于通过测量相邻正交脉冲边沿经过的时间计算电动机速度。然而该公式与高速估算公式具有相反的限制,相对高的电动机速度和传感器准确度使得时间间隔ΔT较小,这样受定时器准确度影响更大。由此可以引入高速估算时可观的误差。
对于较大速度范围的系统(即高速与低速估算都需要),在低速时用低速估算公式,当电动机速度超过某一指定值时,DSP软件切换到高速估算公式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





