凸轮控制器是电动起重机械中控制电动机起动、调速、停止、正反运行的专用装置,它是通过凸轮的转动而带动触点的闭合与打开,从而使电源接通或短接电阻。凸轮控制器的基本接线见图11-1。
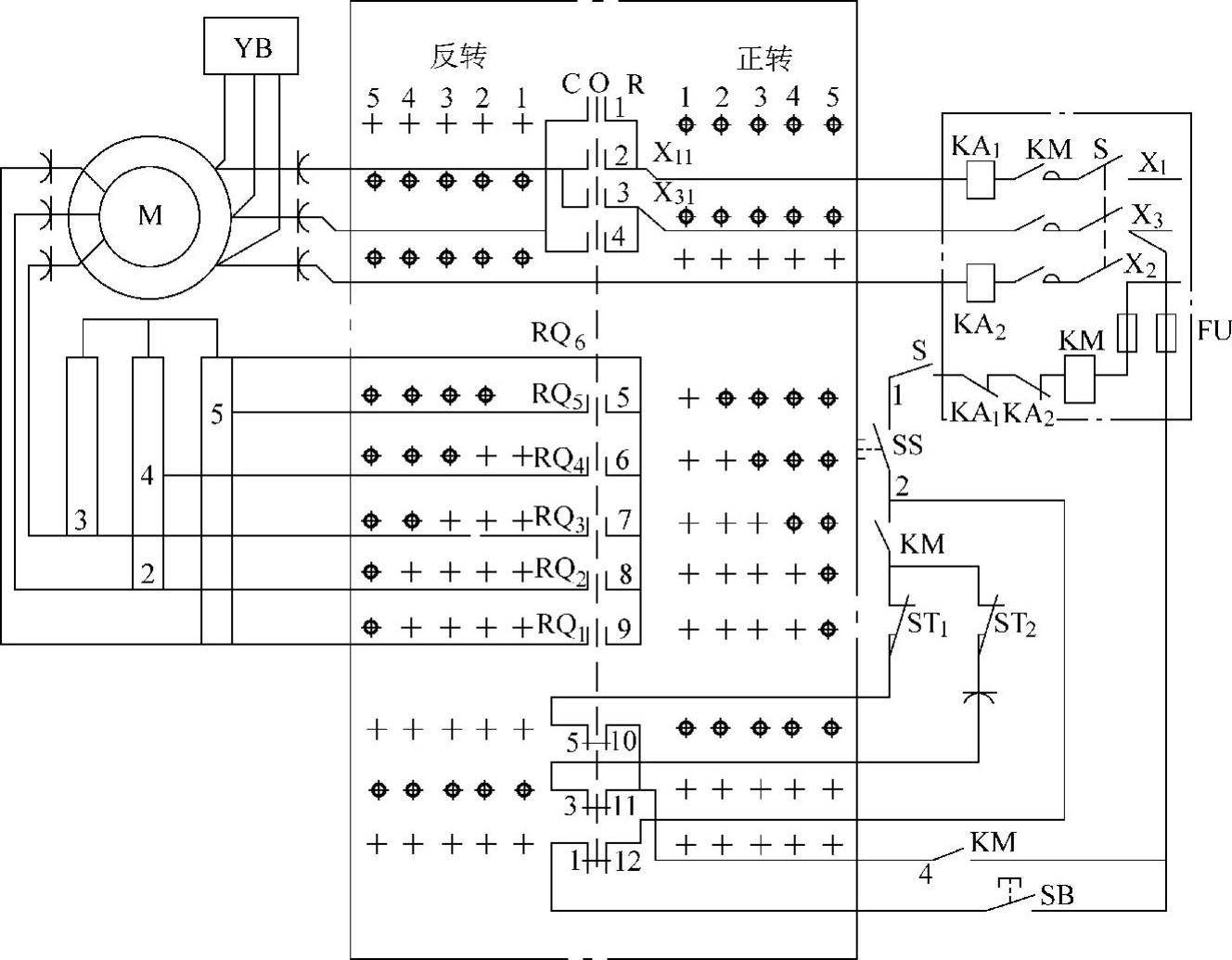
图11-1 凸轮控制器原理接线图
凸轮控制器一般有12副触头,且每副触头均有正反方向闭合的功能且正反方向联锁。其1~4#触头是接通和切断电动机定子回路的,只控制电动机的两相,另一相不经过触头控制,直接由电源接至电动机定子,这是电动起重机械中电动机接线的一个特点。5~9#触头是分段切除转子串接电阻的;10~12#触头均为常闭触头,是用在保护回路的。图中标有 的位置则表示该触头在这个位置是接通的,而标有+的位置则表示该触头在这个位置是断开的。而常闭触头10~12#在“0”位时是接通的。
的位置则表示该触头在这个位置是接通的,而标有+的位置则表示该触头在这个位置是断开的。而常闭触头10~12#在“0”位时是接通的。
下面我们分析凸轮控制器的工作原理。
1)凸轮控制器是与交流接触器配合使用的。由图可知,接触器的线圈经过按钮SB、行程开关ST1和ST2以及凸轮控制器的三副常闭触头组成了控制回路。在“0”位时,10~12#触头是闭合的,操作按钮SB。电流经X3、FU、SB、12#触头、SS(紧急开关,已闭合)、S(舱门开关,已闭合)、KA1、KA2与线圈形成回路,接触器吸合。同时,接触器的两副常开辅助触头KM闭合自保。这样当凸轮无论转向正或反时,12#触头打开而接触器线圈仍有电吸合。假如转向正转位置1时,这时12#、11#触头打开,而10#触头闭合,电流经X3、FU、辅助触点KM、10#触头、ST1、辅助触点KM、SS、S、KA1、KA2与线圈形成回路,接触器保持吸合。假如转向反转位置1时,12#、10#触头打开,11#触头闭合。电流经X3、FU、辅助触点KM、11#触头、ST2、辅助触头KM、SS、S、KA1、KA2与线圈形成回路,接触器保持吸合。
凸轮控制器的正转触头在正向操作时,一经闭合将不再打开,反向操作时,一经打开将不再闭合,不会出现交流接触器失电现象。反转触头与之相同。其他触头只有在打黑点和不打黑点间进行闭合和断开或断开与闭合的切换。(www.daowen.com)
因电源失电、KA动作、ST动作、SS动作,接触器失电断开,要使其重新得电,必须将凸轮控制器的手柄反向转到“0”位,这时12#触头闭合,这样才能重新起动。因此,12#触头则称为零位保护或零压保护触头。
2)1~4#触头中,1#、3#为正转触头,2#、4#为反转触头,当正转或反转触头接通时,非控制相因先直接给了电动机,电磁抱闸得电松开,电机在转子串接全部电阻下慢速起动。如需要加速,可将手柄从1的位置转到2的位置,这时5#触头闭合,将5~0段电阻短接,电动机则加速。同样6#触头短接4~0段电阻,7#触头短接3~0段电阻,8#触头短接2~4段电阻,9#触头短接1~5段电阻,电机达到最高速。然后手柄反向转动,则触头打开,电阻增加,电动机则减速,到“0”位时电机停止。反转操作同正转。
3)运行中,行程开关ST、紧急开关SS、舱门开关S、过电流继电器KA将起到保护作用。
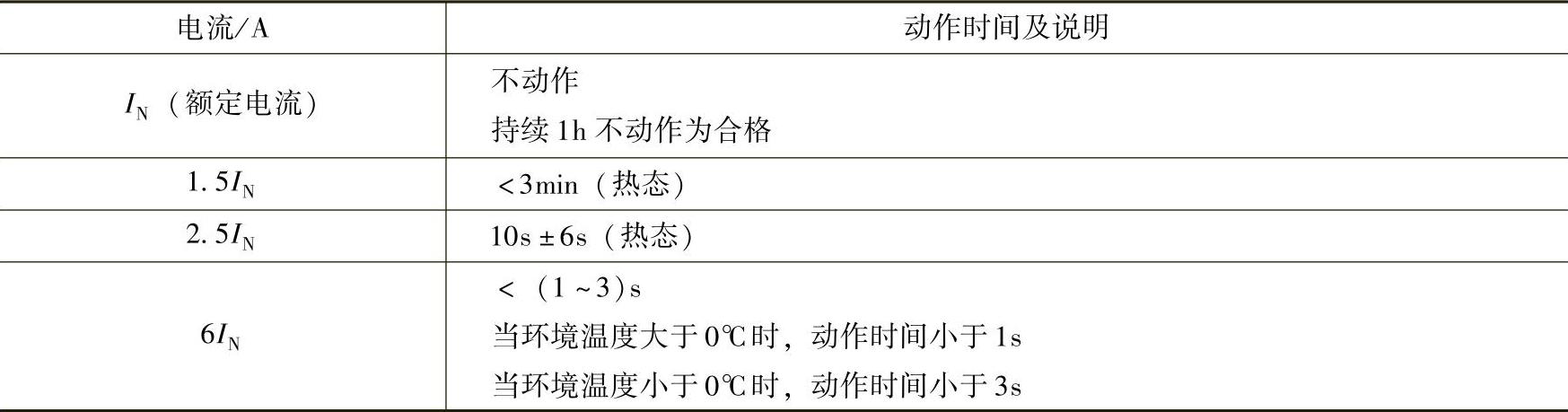
其中KA一般采用过电流延时继电器,具有起动延时、过载延时、过电流迅速动作的反时限特性,其性能见表11-1。由表可以看出,该线路既可躲过起动电流,又能在过载或过电流时跳闸,保护电动机。
表11-1JL12系列过电流继电器反时限特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



