单相无刷直流电动机利用一个霍尔传感器实现电子换相。移动霍尔传感器,可以实现超前换相或滞后换相。在图15-10表示一个U形铁心的两极双绕组单相无刷电动机,主要数据见表15-1。它有U形的定子铁心,圆柱形铁氧体转子,在铁心齿表面开了凹槽以解决死点问题。在铁心安放有绝缘骨架以便绕制线圈,图中表示双线圈结构,也可以是单线圈的。电机设计转向为反时针。霍尔传感器放置在两个铁心齿之间的中央位置上,作为原始位置。参考文献[5]研究这样结构的单相无刷直流电动机,有限元分析移动霍尔传感器偏离原始位置,比较超前换相或滞后换相时电机性能的变化。
表15-1 U形电机主要数据

在图15-11分别给出在相同直流电压下滞后换相与超前换相的电流波形图。它与图15-12超前换相(细线)和滞后换相(粗线)的输入电流仿真结果基本相同。在滞后换相时,电流波形有一个中间下凹形状。而在超前换相则相反,电流波形有一个上凸形状。这意味着,滞后换相的平均电流比超前换相低,并且滞后换相的转速(2200r/min)也低于超前换相(2790r/min)。因此,超前换相的效率比滞后换相高,滞后换相的转矩波动大于超前换相。
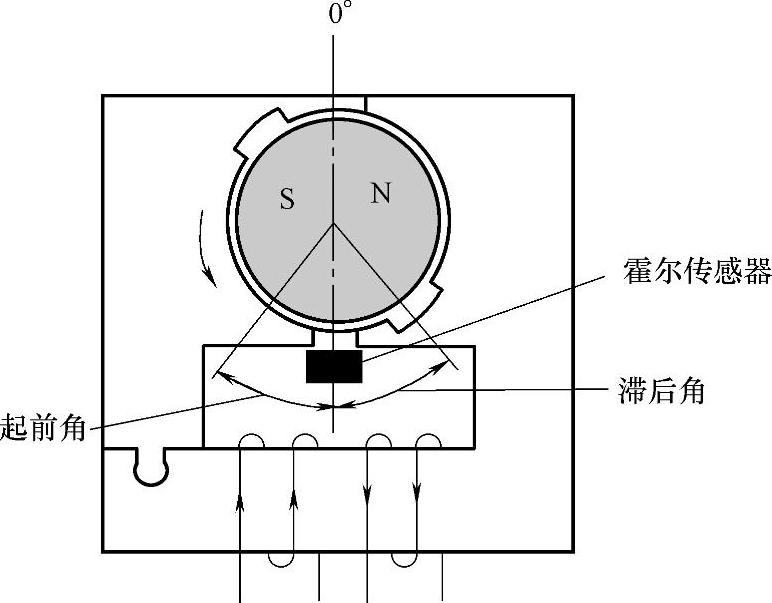
图15-10 U形铁心的两极单相无刷电动机
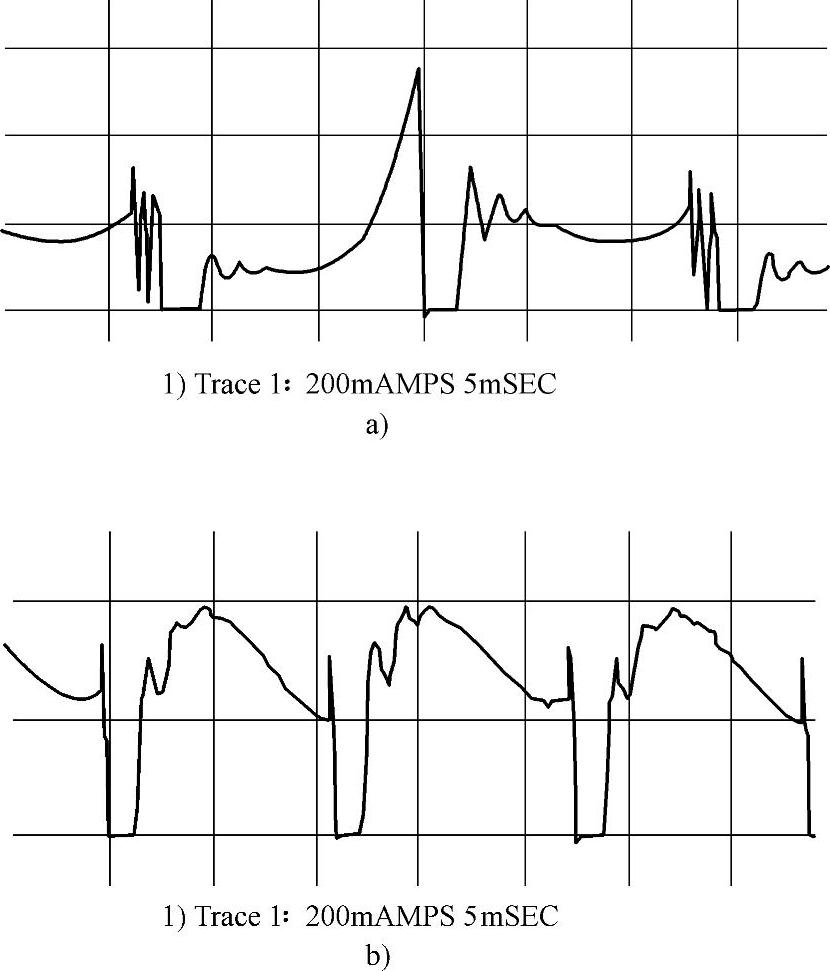
图15-11 滞后换相与超前换相的电流波形图(www.daowen.com)
a)滞后(n=2200r/min) b)超前(n=2790r/min)
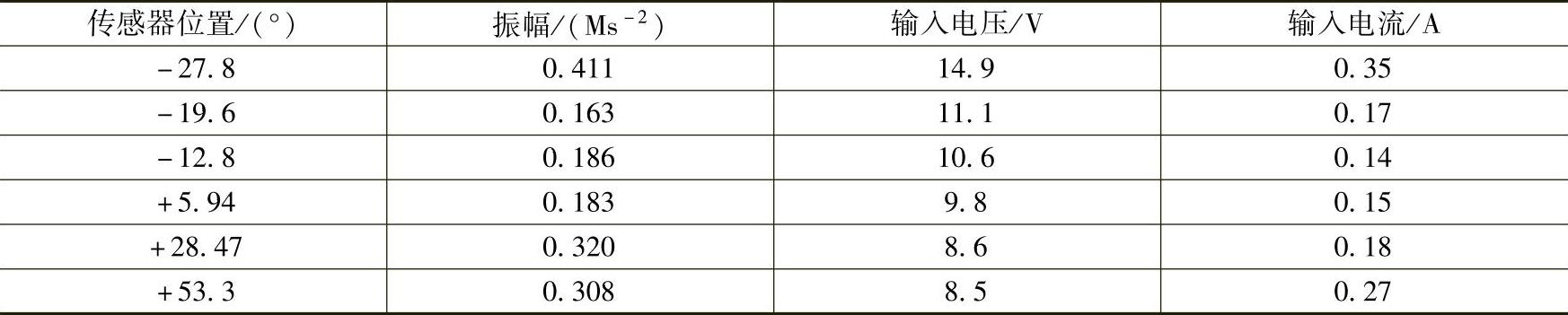
表15-2给出在某恒定速度条件下传感器几个不同位置时电机的振幅和输入电流测量值。它显示滞后角和超前角变化对单相电机振动和电机性能的影响。试验结果与上述电流波形模拟分析结果是一致的。仿真研究在不同超前角时的电机转矩,它们的平均转矩均高于传感器安置原始位置。当霍尔开关放置在约超前5°的位置时电机的性能最佳。
这个研究分析表明,适当的超前换相是有利的。这个结论对其他结构的单相无刷直流电机也是有意义的。
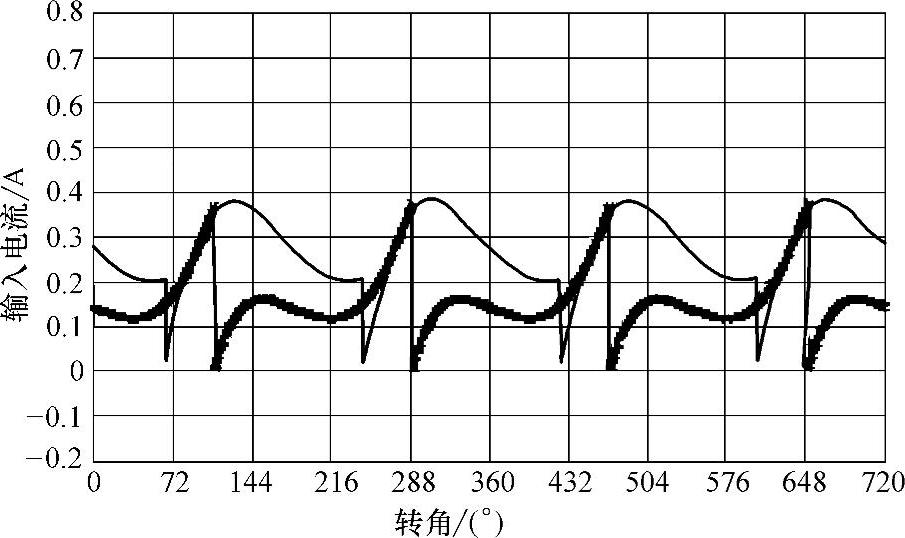
图15-12 超前换相(细线)和滞后换相(粗线)的输入电流仿真结果
表15-2 霍尔传感器不同位置的振幅和输入电流试验测量结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






