美国Atmel半导体公司的ATtiny261/461/861系列是一种低成本正弦波微控制器,其特点:
1)利用三个霍尔传感器控制。
2)三相正弦波控制,每个换相周期内细分为192步,幅值分辨率10bit。
3)输入模拟电压作速度参考,正弦波幅值受到速度控制。
4)以方波换相方式安全起动,自动切换到正弦波控制。
5)硬件产生死区时间,防止上下桥臂直通。
6)数字输入控制转向。
7)停机和反转安全程序,可选择制动或滑行停止。
8)超前角可调运行。
常规的产生三相正弦波信号方法是储存一个正弦波表并使用查找此表来生成对称的三相绕组端电压U、V、W正弦波。然而,对于无刷直流电动机驱动可设计更有效的方式来产生正弦波驱动波形。参考文献[3]介绍了该系列微控制器产生三相正弦波信号更有效的方法——以非对称相电压产生对称线电压正弦波方法。实际上,我们没有必要为每个绕组端电压(对地)产生正弦信号,只需要保证三个线电压是正弦变化(它们之间的分别有120°相移)就可以。表14-1和表14-2显示了这种新的方法如何以特定的端电压U、V、W波形产生正弦波线电压。图14-2、图14-3表示了特定的端电压波形和三个霍尔传感器信号波形之间的相位关系,图中同时也给出按同样思路产生方波线电压时的特定的端电压波形(以虚线表示)。在一个换相周期有6个状态S1~S6,分为3个区间,每个区间内的端电压U、V、W有不同表达式,它们只是正弦函数的一个部分或为零。为了便于理解,在图14-4以相量图表示正转时三个区间由表14-1设定的端电压U、V、W是如何产生三相对称的正弦波线电压的。图中以点划线表示端电压,以粗线表示线电压。
这种办法有两个好处。首先,产生的最高线电压比常规的相电压正弦波法高,使电压的利用率提高约15%,可产生更高的转矩和速度。其次,每一个端电压输出有1/3的时间为零,从而减少功率级的开关损耗。
表14-1 正转时的端电压和线电压(https://www.daowen.com)

表14-2 反转时的端电压和线电压

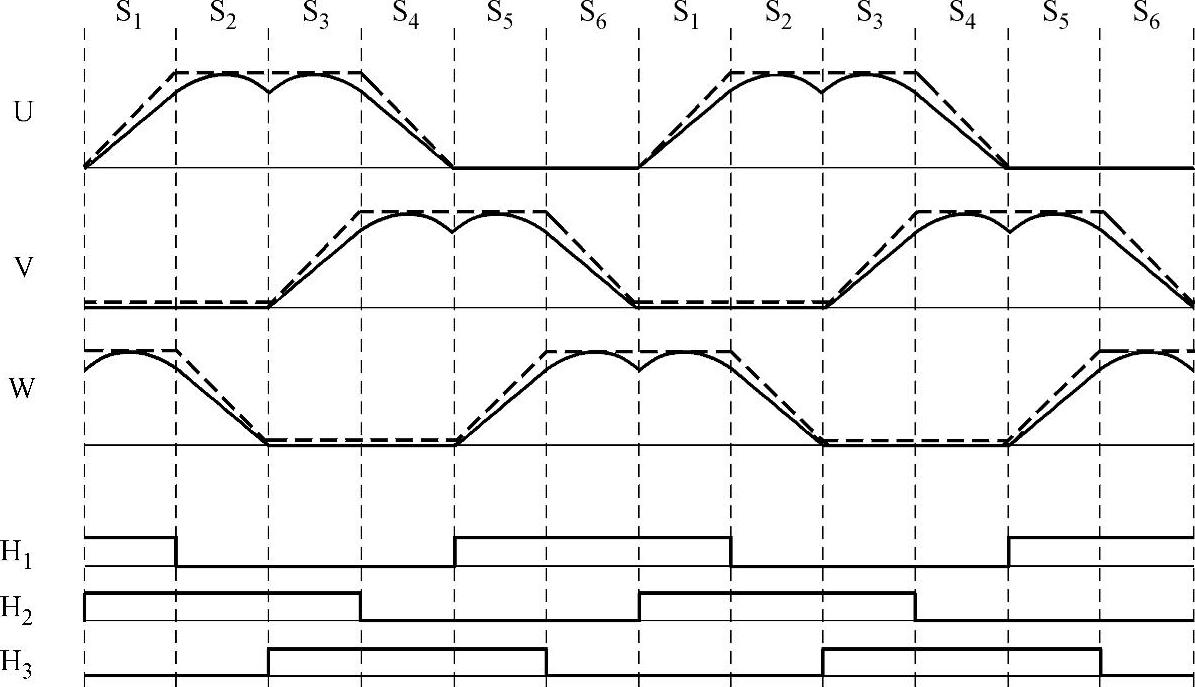
图14-2 正转端电压波形图
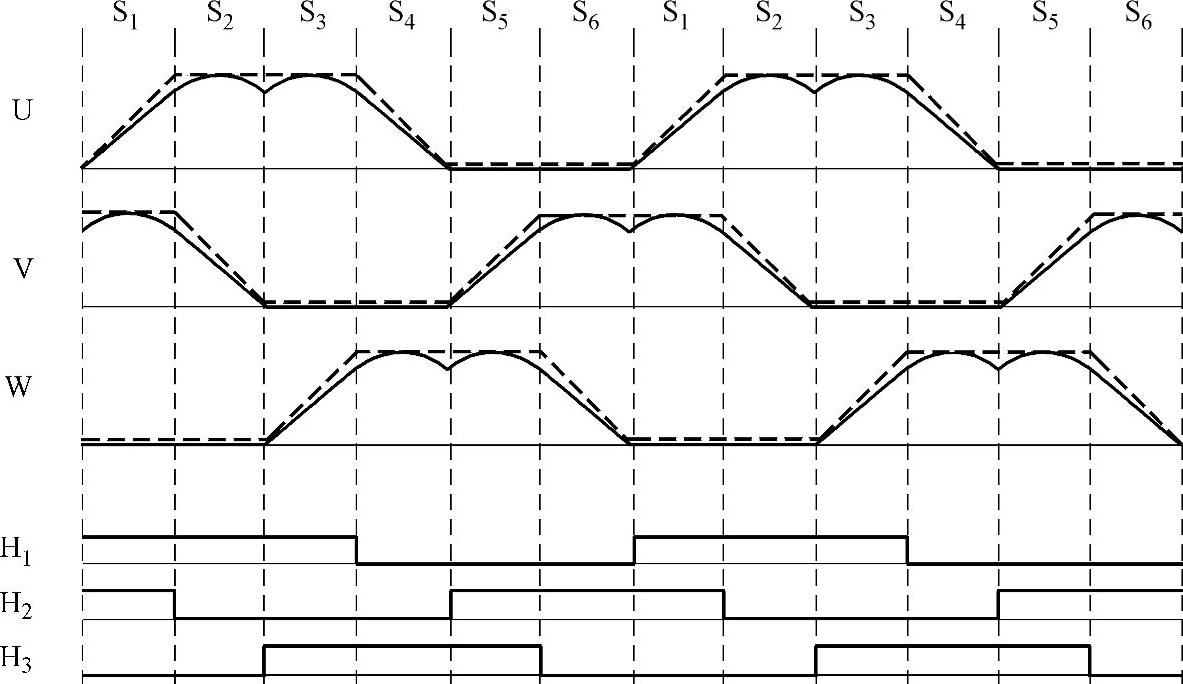
图14-3 反转端电压波形图
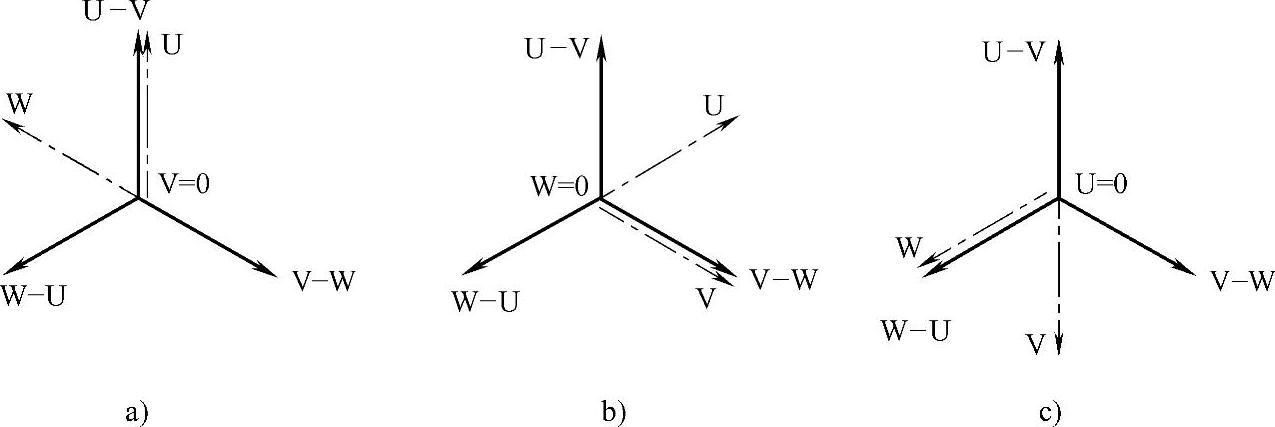
图14-4 正转时三个区间端电压与线电压相量图
a)S1-S2区间 b)S3-S4区间 c)S5-S6区间
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







