ST7MC是意法(ST)公司推出的8位电机控制专用微控制器芯片,适用于无刷直流电机无传感器控制。它具有高灵敏度的反电动势过零检测,高去噪能力,即使在电机高速运行时也能实现正确检测。反电动势可直接取自断开相绕组的端电压,不需经滤波电路,因此没有相移问题。参考文献[15]介绍一种基于ST7MC单片机的两相导通三相六状态星型接法无位置传感器无刷直流电机控制方案。该方案通过检测三相定子绕组反电动势过零点,来确定转子位置,决定换相时刻。
无刷直流电动机起动时,先由程序控制给电机的两相定子绕组通电,经过一段时间转子处于预定的初始位置。然后按照电机预定转向的换相顺序由程序控制给相应绕组馈电,使电机起动,该期间同时进行反电动势的过零检测,但换相不受反电动势检测信号的控制。电机按预先规定的次序进行换相且时间间隔由软件延时控制,该时间间隔逐渐变短,程序控制PWM波占空比不变,采取变频恒压的方式起动。等待连续检测到两次反电动势过零信号即令程序跳出开环换相过程,进入由反电动势检测信号控制电机换相的自控式运行状态,完成电机的起动过程。电机三段式起动过程的相电流、换相、反电动势过零信号如图13-8所示。
反电动势取样电路:反电动势信号直接取自逆变器的3个输出端,电动机端电压通过限流电阻分别送入ST7MC的MCRA、MCRB、MCRC三个引脚,它们与由寄存器定义的电压基准值或者外部参考电压值比较,本系统中用寄存器定义的0.2V作为反电动势过零点的基准值。检测到反电动势过零点后需要延时30°才是换相点,这个延时如果由硬件来完成不仅会增加系统控制电路的复杂性,而且电路本身会带来相移误差,需要对相移修正。这里采取完全由软件程序计算的方法来实现相角延时以得到换相点:由于相邻两个过零点相差60°,所以把前一个和此次过零的间隔时间除以2计算得到30°的延时时间。
本方案采用软件滤波的方法消除换相点附近的干扰。当换相发生后,程序控制从换相时刻起的一段时间内不计算反电动势值,也就是在干扰期间跳过反电动势过零检测程序段,以避开干扰影响。由于干扰持续的时间很短,因此放弃检测的这段时间也不宜过长,视具体系统而定。本文根据电机参数选择检测时间在200~500ns之间,实验证明采用上述软件滤波算法可以很好地消除干扰。(https://www.daowen.com)
采用上述控制方案进行实验研究,实验对象为电动自行车、电动摩托车用无刷直流电机,电机参数为:极对数3,输入直流电压48V,功率700W,最大转速3000r/min。结果表明该系统能使电机顺利平稳起动,并很好地实现了电机自动换相、平稳运行,从图13-8中平稳的波形可以看出,其控制效果明显优于纯硬件设计的控制系统。
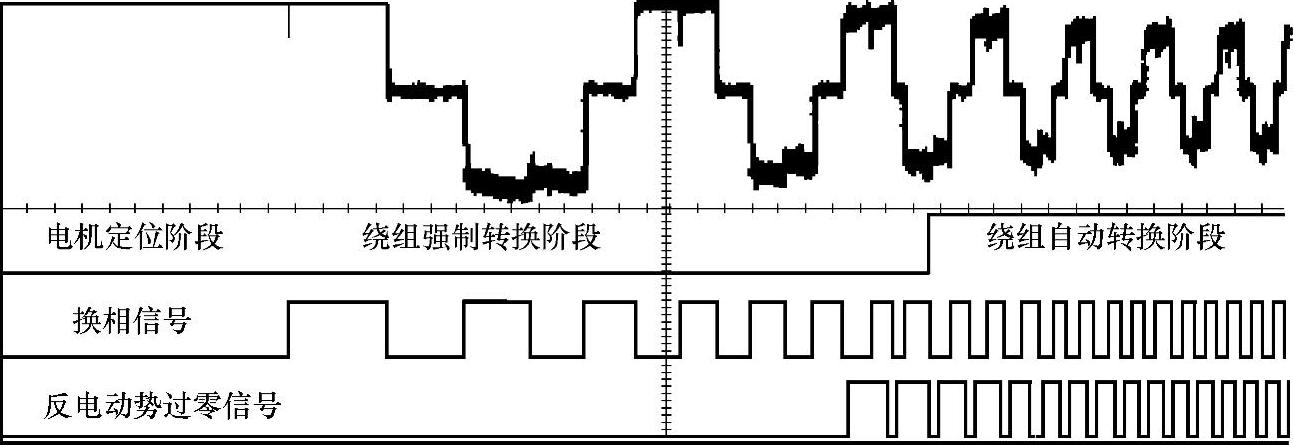
图13-8 电机三段式起动过程的相电流、换相信号、反电动势过零信号图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





