意法(ST Microelectronics)公司的L6235是一个有较大输出功率的三相无刷直流电动机驱动器。这个单片驱动器集成了驱动一个采用霍尔传感器三相BLDC所需的全部电路,其中包括三相DMOS电桥、固定间歇(off)时间PWM电流控制器和霍尔传感器信号解码逻辑。控制输入与CMOS/TTL逻辑和微处理器信号兼容,它具有使能、PWM控制、正反向控制、制动控制,以及过电流、过热、欠电压、防止交叉导通保护功能。使用电源电压范围:8~52V,峰值输出电流:5.6A,连续输出电流(有效值):2.8A。
它的三相逆变桥由六个DMOS晶体管组成。在25℃时典型通态电阻Rds(on)(典型值)0.3Ω。每个DMOS晶体管都内置有一个快速续流二极管。交叉传导保护是利用上下桥臂上的两个功率MOSFET设置有死区时间(典型值1μs,由一个内部定时电路设定)实现的。利用三相BLDC电机检测转子位置的霍尔传感器发来的信号,由解码逻辑提供正确的三相桥功率开关的驱动信号。该芯片的特色是对于60°、120°、240°或360°间隔的霍尔传感器配置,这个创新的复合逻辑电路能够自动辨别转子的位置,获得正确的解码。不必像其他常见的三相BLDC控制芯片那样对不同传感器配置需要在指定专门引脚进行选择。
L6235设有一个测速(TACHO)输出,利用它可构成一个简单而有效的速度控制,如图12-40所示。来自霍尔传感器H1引脚的脉冲转换成一个定时关断的方波脉冲,脉冲宽度由RCpulse引脚上的R和C决定。这个脉冲在TACHO脚输出,可用低通滤波器过滤获得与电机转速成正比的电压信号。这个转速电压在外接的误差放大器中与参考电压UREF比较,误差放大器经PI调节后输出送至芯片的VREF引脚,完成速度闭环调节。这种设计只需很少的外部元件即可实现一个低成本的转速控制回路,如图12-40所示。
下面给出由一个微控制器MCU(或DSP)与L6235组合构成三相无刷直流电动机驱动的应用电路例子,如图12-41所示。被控电机主要数据:工作电压:24V,最大限流:1.5A,绕组电阻:2Ω,绕组电感:800H,工作转速:10000r/min(f=167Hz),对应的反电动势:10V。
如果参考电压设为0.5V,限流为1.5A需要采样电阻R5取0.33Ω。这里使用了三个1Ω/0.25W(1%)电阻并联得到。充电泵使用推荐的元件:1N4148二极管,陶瓷电容器和一个100Ω电阻减少EMI。连接到RCpulse引脚是R3=24kΩ,C4=470pF,获得tOFF=7.8μs。EN(使能)脚和DIAG脚接C1=5.6nF电容,该引脚经过一个R1=100kΩ电阻接到MCU。另外利用FWD/REV(正反转)脚、BRAKE(制动)脚、TACHO(测速)脚连接到MCU。(www.daowen.com)
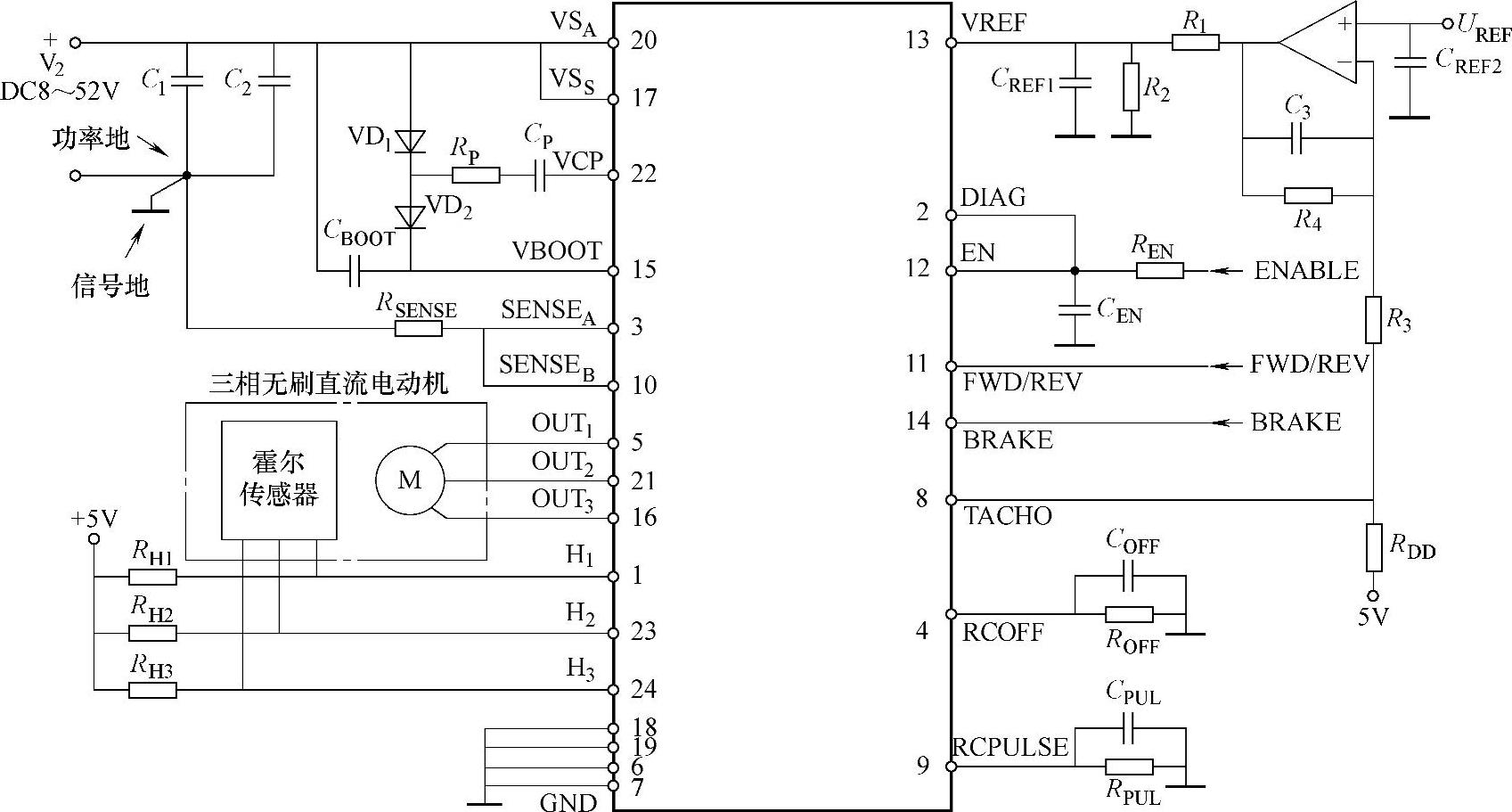
图12-40 L6235外接一个运放组成转速闭环控制设计例
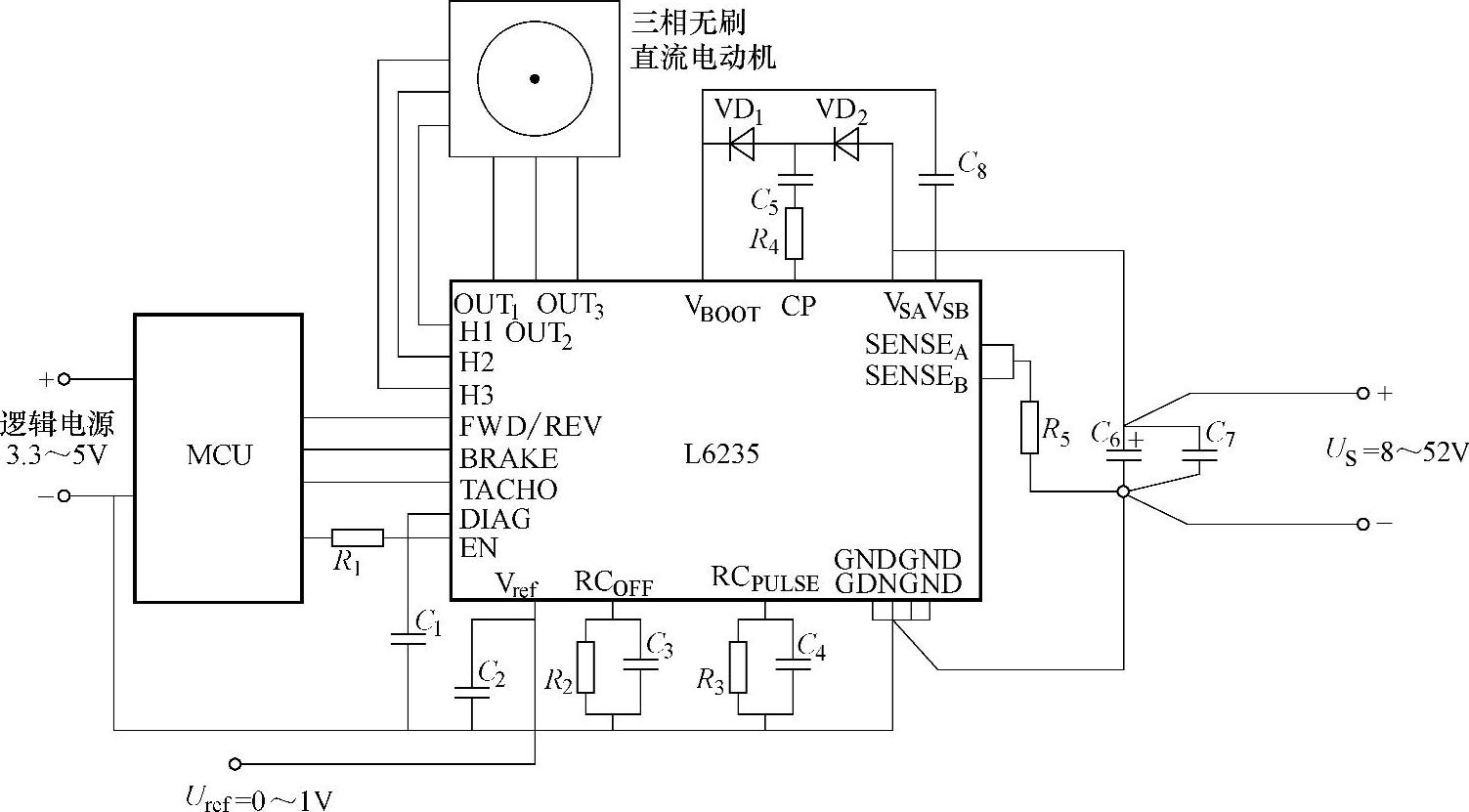
图12-41 一个微控制器MCU与L6235组合应用电路示例
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





