三相无刷电动机,理论上其三个相绕组的连接可以采用星形 或三角形(
或三角形( )两种接法。分析表明,在只考虑反电动势基波条件下,同一台电机按
)两种接法。分析表明,在只考虑反电动势基波条件下,同一台电机按 接法和按
接法和按 接法时的反电动势系数之比是
接法时的反电动势系数之比是 ,而它们的理想空载转速之比为1/3=0.577。由此,只要设法将电机绕组用开关切换,在
,而它们的理想空载转速之比为1/3=0.577。由此,只要设法将电机绕组用开关切换,在 接法时电机工作于低速模式,转矩系数大,同样电流下可得到大的启动转矩;以
接法时电机工作于低速模式,转矩系数大,同样电流下可得到大的启动转矩;以 接法时电机工作于高速模式,提升电机转速。空载转速提升1.73倍。
接法时电机工作于高速模式,提升电机转速。空载转速提升1.73倍。
如果进一步将每相绕组均分为两段,也通过开关切换,这两段线圈串联(-ser)或并联(-par),如图12-28所示,可以得到四种切换组合,获得更宽的转速范围。理想空载转速比最大达到3.46倍。在图12-30定性地表示出这种方法四种切换组合下的工作区,它考虑了驱动器安全限流。它显示兼顾了在不同工作点时电流在合理范围内[17]。
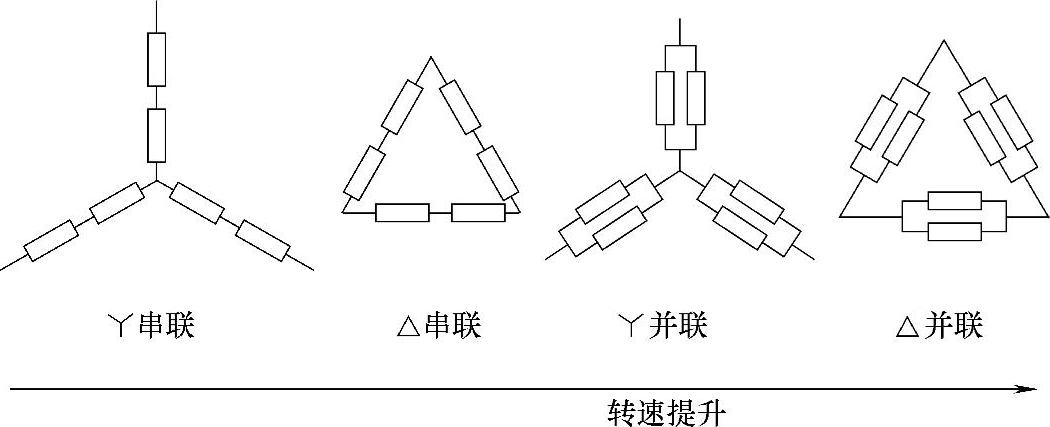
图12-28 四种切换组合的绕组连接
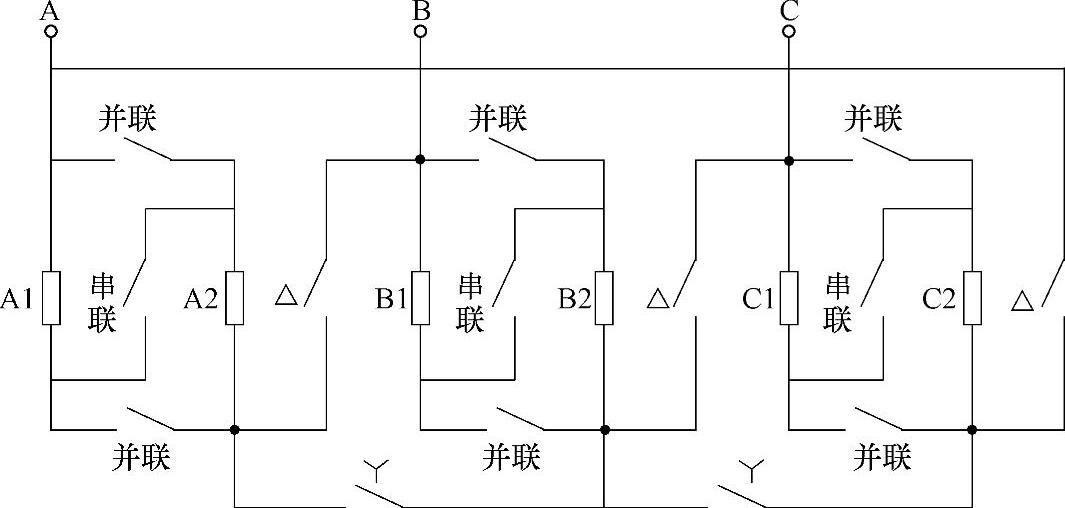
图12-29 实现四种切换组合的切换开关连接图
在图12-29给出利用电磁开关元件,例如继电器或接触器,作为切换开关的连接电路图。一共需要14个切换开关,其中串联开关3个,并联开关6个, 切换开关3个,
切换开关3个, 切换开关2个。注意开关切换需要一定顺序,必要的切换时延,避免发生短路。
切换开关2个。注意开关切换需要一定顺序,必要的切换时延,避免发生短路。
当此技术用于大功率电机时,切换开关可采用半导体功率开关,例如晶闸管。(https://www.daowen.com)
表12-3 四种切换组合比较

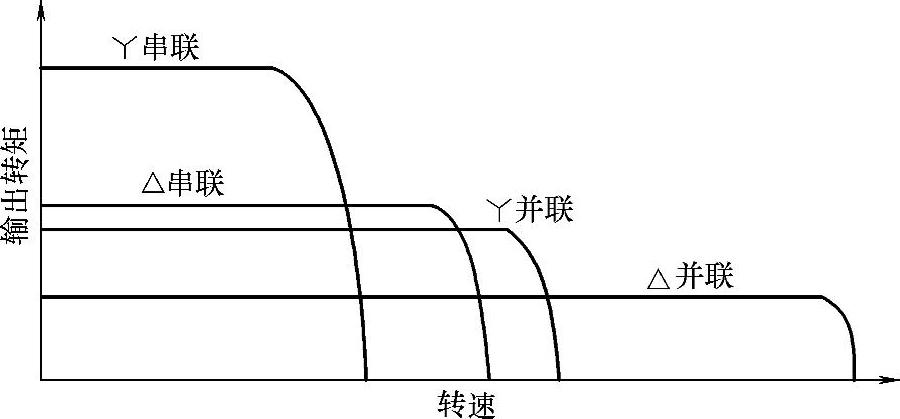
图12-30 四种切换组合的下的转矩-转速工作区
另一个问题是无刷直流电动机设计成梯形波反电动势时,梯形波反电动势中含有较大的3次谐波成分,且在三相绕组内相位相同,如果将绕组接成三角形,会产生较大的3次谐波环流,使得电动机出现相当大的附加损耗,负载运行时电流会有很大的畸变,损耗会更大,电动机运行不平稳。满足特定条件设计的电机可以避免3次谐波环流出现,参见第3章3.4节。
这种切换方案效果可参见表12-3中的 串联和
串联和
 并联,理想空载转速比达到2。平均每相需要3个切换开关。图12-30给出四种切换组合的下的转矩-转速工作区情况,显示出转速有大范围变化。
并联,理想空载转速比达到2。平均每相需要3个切换开关。图12-30给出四种切换组合的下的转矩-转速工作区情况,显示出转速有大范围变化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




